一种带有准双齿轮结构的中空机器人手腕的制作方法
本发明涉及机器人,具体为一种带有准双齿轮结构的中空机器人手腕。
背景技术:
1、在机械传动领域,齿轮传动系统广泛应用于各类机械设备中。传统齿轮传动系统通常包括一对或多对齿轮,这些齿轮通过啮合来传递运动和动力。随着机械设备的小型化、轻量化和高效化的需求不断增加,齿轮传动系统的设计也在不断演进。其中,准双齿轮因其能够提供更高的传动效率和更好的力学性能而受到越来越多的关注。
2、带有准双齿轮的中实机器人手腕虽然展现出了一些优点,比如高刚性、耐冲击、长寿命以及大中空等特性,但现有技术也存在一些不足之处。准双齿轮结构的中实机器人手腕在灵活性、散热、电缆管理、承载能力、刚性和稳定性、动作速度、应用场景多样性、成本效益、技术创新、传动效率以及综合性能方面可能存在局限。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种带有准双齿轮结构的中空机器人手腕。结构合理、强度高且具有优良散热性能,相较于中实手腕,在设计、性能、应用灵活性、成本效益以及产业推动方面展现出显著的优势,具有重要的实际意义。
2、本发明所要解决的技术问题采用以下技术方案来实现:
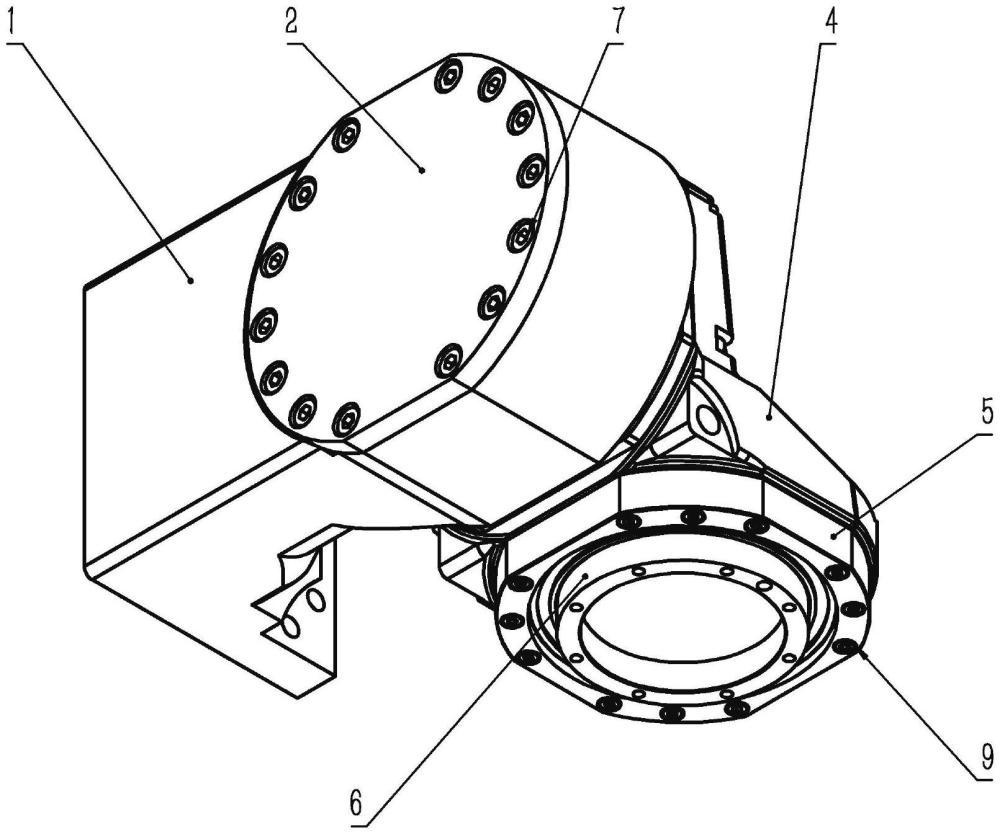
3、一种带有准双齿轮结构的中空机器人手腕,包括,
4、五轴第一壳体;
5、五轴第二壳体,通过五轴第一螺钉与所述五轴第一壳体连接;
6、五轴第三壳体;
7、六轴第一壳体,通过五轴第二螺钉与所述五轴第三壳体连接;
8、六轴第二壳体,通过六轴第一螺钉与所述六轴第一壳体连接;
9、六轴第三壳体,为中空结构;
10、五轴ⅰ轴,设置在所述五轴第一壳体内;
11、五轴ⅱ轴,设置在所述五轴第一壳体内且与所述五轴第三壳体固定连接,所述五轴ⅱ轴与所述五轴ⅰ轴啮合连接组成准双曲面齿轮副;
12、六轴ⅰ轴,设置在所述五轴第一壳体内;
13、六轴ⅱ轴,设置在所述五轴第三壳体、六轴第一壳体以及六轴第二壳体内,所述六轴ⅱ轴与所述六轴ⅰ轴啮合连接组成准双曲面齿轮副;
14、六轴ⅲ轴,固定在所述六轴第三壳体内,所述六轴ⅲ轴与所述六轴ⅱ轴啮合连接组成锥齿轮副。
15、作为本发明的进一步改进,所述五轴ⅰ轴包括五轴第一齿轮、安装在所述五轴第一壳体内部的五轴第一轴承,所述五轴第一齿轮安装在所述五轴第一轴承上。
16、作为本发明的进一步改进,所述五轴ⅱ轴包括位于所述五轴第一壳体内部且通过五轴第三螺钉与所述五轴第三壳体固定连接的所述五轴第二齿轮、安装在所述五轴第一壳体内部的五轴第二轴承,所述五轴第二齿轮与所述五轴第二轴承通过五轴第一垫片连接,所述五轴第二齿轮与所述五轴第一齿轮啮合连接。
17、作为本发明的进一步改进,所述五轴ⅱ轴还包括设置在所述五轴第一壳体与所述五轴第三壳体之间的五轴旋转唇形密封圈、设置在所述五轴第三壳体与所述六轴第一壳体之间的五轴o形圈。
18、作为本发明的进一步改进,所述六轴ⅰ轴包括六轴第一齿轮、安装在所述五轴第一壳体内部的六轴第一轴承,所述六轴第一齿轮安装在所述六轴第一轴承上。
19、作为本发明的进一步改进,所述六轴ⅱ轴包括位于所述五轴第一壳体内部且与所述六轴第一齿轮啮合连接的六轴第二齿轮、位于所述六轴第二壳体内部的六轴第三齿轮、安装在所述五轴第二壳体上的六轴第二轴承以及六轴第三轴承、安装在所述五轴第三壳体内部的六轴第五轴承,所述六轴第二齿轮与所述六轴第三齿轮同轴连接组成六轴双联齿轮,所述六轴第二齿轮安装在所述六轴第二轴承、六轴第三轴承上,所述六轴第三齿轮安装在所述六轴第五轴承上。
20、作为本发明的进一步改进,所述六轴第二齿轮与所述五轴第二齿轮同轴且通过六轴第一垫片以及六轴第四轴承连接。
21、作为本发明的进一步改进,所述六轴ⅲ轴包括同轴设置在所述六轴第三壳体上且与所述六轴第三齿轮啮合连接的六轴第四齿轮、设置在所述六轴第一壳体与所述六轴第二壳体之间的六轴o形圈、设置在所述六轴第一壳体与所述六轴第三壳体之间的六轴旋转唇形密封圈、设置在所述六轴第二壳体与所述六轴第三壳体之间的六轴第六轴承。
22、本发明的有益效果是:
23、1、实现中空结构的便利性:中空手腕的设计允许管线和电缆通过,简化布线管理,减少外部干扰,同时提供更大的自由度,使得机器人手腕在空间中的运动更加灵活。
24、2、改善手腕的散热性能:中空结构有助于手腕内部的散热,避免因长时间工作导致的过热问题,延长机器人手腕的使用寿命。
25、3、降低维护成本和复杂性:优化的齿轮结构和中空设计减少了机械部件的数量和复杂性,从而降低了维护成本和故障率。
26、4、实现高负载高精度作业:中空手腕结构结合准双齿轮设计,使得机器人手腕能够在保持高负载的同时实现高精度作业,满足工业自动化中对精度和力量的双重需求。
27、5、提高传动效率和精度:通过优化齿轮结构和传动系统设计,实现更准确的传动比和更高的传动效率,保证机器人手腕在执行任务时的精确性和重复性。
28、6、提升机器人手腕的适应性:中空手腕结构使得机器人手腕能够适应各种不同的工具和设备,提高了机器人在多样化作业环境中的适应性。
技术特征:
1.一种带有准双齿轮结构的中空机器人手腕,其特征在于:包括,
2.根据权利要求1所述的一种带有准双齿轮结构的中空机器人手腕,其特征在于:所述五轴ⅰ轴包括五轴第一齿轮(10)、安装在所述五轴第一壳体(1)内部的五轴第一轴承(11),所述五轴第一齿轮(10)安装在所述五轴第一轴承(11)上。
3.根据权利要求2所述的一种带有准双齿轮结构的中空机器人手腕,其特征在于:所述五轴ⅱ轴包括位于所述五轴第一壳体(1)内部且通过五轴第三螺钉(13)与所述五轴第三壳体(3)固定连接的五轴第二齿轮(12)、安装在所述五轴第一壳体(1)内部的五轴第二轴承(15),所述五轴第二齿轮(12)与所述五轴第二轴承(15)通过五轴第一垫片(14)连接,所述五轴第二齿轮(12)与所述五轴第一齿轮(10)啮合连接。
4.根据权利要求3所述的一种带有准双齿轮结构的中空机器人手腕,其特征在于:所述五轴ⅱ轴还包括设置在所述五轴第一壳体(1)与所述五轴第三壳体(3)之间的五轴旋转唇形密封圈(16)、设置在所述五轴第三壳体(3)与所述六轴第一壳体(4)之间的五轴o形圈(17)。
5.根据权利要求3所述的一种带有准双齿轮结构的中空机器人手腕,其特征在于:所述六轴ⅰ轴包括六轴第一齿轮(20)、安装在所述五轴第一壳体(1)内部的六轴第一轴承(21),所述六轴第一齿轮(20)安装在所述六轴第一轴承(21)上。
6.根据权利要求5所述的一种带有准双齿轮结构的中空机器人手腕,其特征在于:所述六轴ⅱ轴包括位于所述五轴第一壳体(1)内部且与所述六轴第一齿轮(20)啮合连接的六轴第二齿轮(22)、位于所述六轴第二壳体(5)内部的六轴第三齿轮(23)、安装在所述五轴第二壳体(2)上的六轴第二轴承(24)以及六轴第三轴承(25)、安装在所述五轴第三壳体(3)内部的六轴第五轴承(28),所述六轴第二齿轮(22)与所述六轴第三齿轮(23)同轴连接组成六轴双联齿轮,所述六轴第二齿轮(22)安装在所述六轴第二轴承(24)、六轴第三轴承(25)上,所述六轴第三齿轮(23)安装在所述六轴第五轴承(28)上。
7.根据权利要求6所述的一种带有准双齿轮结构的中空机器人手腕,其特征在于:所述六轴第二齿轮(22)与所述五轴第二齿轮(12)同轴且通过六轴第一垫片(26)以及六轴第四轴承(27)连接。
8.根据权利要求6所述的一种带有准双齿轮结构的中空机器人手腕,其特征在于:所述六轴ⅲ轴包括同轴设置在所述六轴第三壳体(6)上且与所述六轴第三齿轮(23)啮合连接的六轴第四齿轮(29)、设置在所述六轴第一壳体(4)与所述六轴第二壳体(5)之间的六轴o形圈(30)、设置在所述六轴第一壳体(4)与所述六轴第三壳体(6)之间的六轴旋转唇形密封圈(31)、设置在所述六轴第二壳体(5)与所述六轴第三壳体(6)之间的六轴第六轴承(32)。
技术总结
本发明涉及机器人技术领域,具体为一种带有准双齿轮结构的中空机器人手腕,包括五轴第一壳体;五轴第二壳体;五轴第三壳体;六轴第一壳体;六轴第二壳体;六轴第三壳体;五轴Ⅰ轴,设置在所述五轴第一壳体内;五轴Ⅱ轴,设置在所述五轴第一壳体内且与所述五轴第三壳体固定连接;六轴Ⅰ轴,设置在所述五轴第一壳体内;六轴Ⅱ轴,设置在所述五轴第三壳体、六轴第一壳体以及六轴第二壳体内;六轴Ⅲ轴,固定在所述六轴第三壳体内。本发明具有实现中空结构的便利性、改善手腕的散热性能、降低维护成本和复杂性、实现高负载高精度作业、提高传动效率和精度、提升机器人手腕的适应性等特点。
技术研发人员:杨众凯,王玉勃,于建涛,沙佳杰
受保护的技术使用者:埃夫特智能装备股份有限公司
技术研发日:
技术公布日:2024/11/11
- 还没有人留言评论。精彩留言会获得点赞!