基于反向式行星滚柱丝杠机构的电动压接钳
本发明涉及电动工具,特别是涉及一种基于反向式行星滚柱丝杠机构的电动压接钳。
背景技术:
1、目前市场上广泛使用的电动压接钳主要采用普通螺杆机构以及液压驱动机构。传统电动压接钳通常采用普通螺杆机构,通过电动机驱动螺杆旋转,从而实现压接操作。由于普通螺杆机构在长期使用过程中容易产生磨损,导致精度下降,无法保证每次压接的质量一致性。且普通螺杆机构的传动效率相对较低,影响压接速度,降低了工作效率。大多数传统螺杆机构依赖于机械弹簧或手动方式复位,复位过程费时费力,影响操作便捷性。
2、液压驱动机构的结构较为复杂,制造和维护的成本较高,且液压系统的精细控制较为困难,容易导致压接力不稳定,从而影响压接质量。液压驱动装置体积较大,不适用于空间受限的操作环境。
3、在专利cn 215645380 u中,提出了一种在电力工程中使用的电缆压接钳,其采用曲杆机构,曲杆的左端通过金属固定轴活动连接通口框,曲杆底部设有橡胶板,所述橡胶板通过菱形槽连接金属拆装头,金属拆装头的尾部一体成型有金属菱形柱,所述通口框的左端连接有金属衔接板,金属衔接板的中心位置设置有菱形嵌合槽。该专利技术方案存在以下缺陷:不便于根据工作场合的需要进行拆卸与安装,驱动机构的传动效率不高,精度有限且效果不佳。
技术实现思路
1、本发明的目的是提供一种基于反向式行星滚柱丝杠机构的电动压接钳,旨在提供一种高精度、高效率、结构简洁且具有自动复位功能的新型电动压接工具。
2、为实现上述目的,本发明提供了如下方案:
3、本发明提供一种基于反向式行星滚柱丝杠机构的电动压接钳,包括:
4、架体,所述架体包括钳头和静压接头;
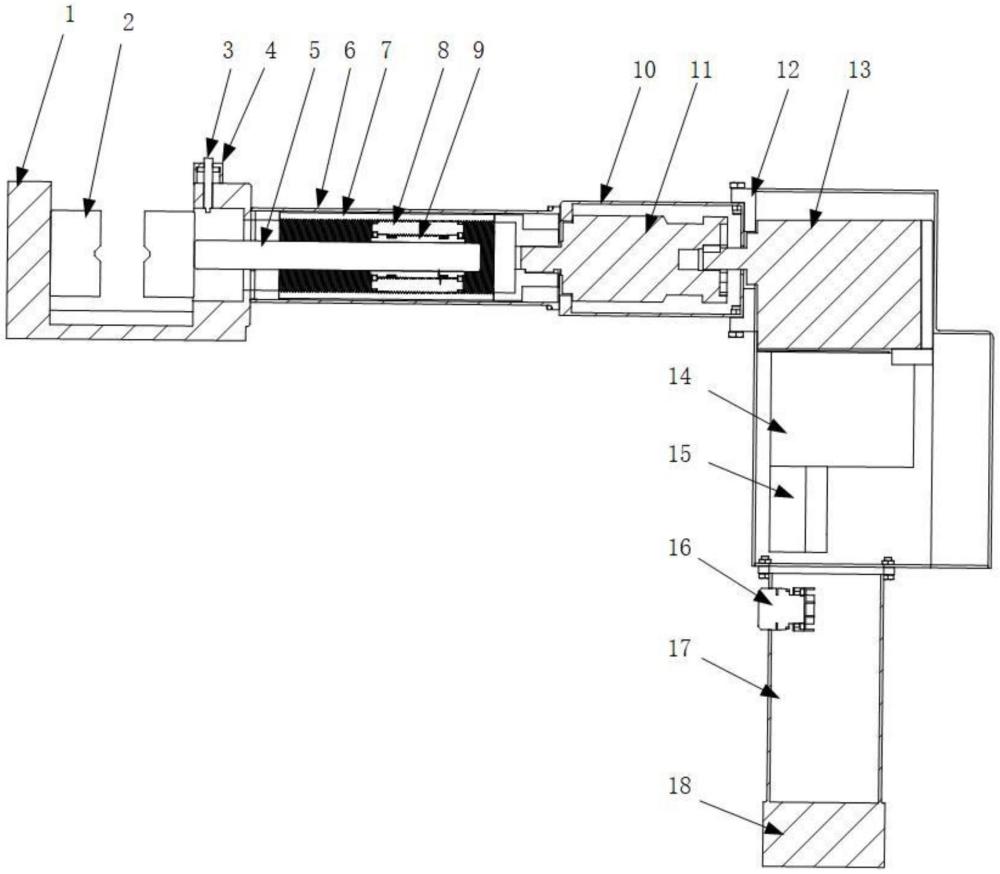
5、动作组件,所述动作组件包括电机、减速器、反向式行星滚柱丝杠副和动压接头;所述电机的输出轴连接所述减速器的输入轴,所述减速器的输出轴连接所述反向式行星滚柱丝杠副的外螺母,所述反向式行星滚柱丝杠副的推杆连接所述动压接头;所述电机能够正转和反转,所述动压接头用于在所述电机的驱动下靠近或远离所述静压接头,以夹持或释放物件;
6、控制组件,所述控制组件包括传感器和控制器;所述传感器安装于所述架体上,且电连接所述控制器,用于监测所述动压接头的位置信息,并将所述位置信息传输至所述控制器;所述控制器电连接所述电机,用于控制所述电机的动作。
7、优选地,所述电机包括电机壳,所述减速器包括减速器壳,所述反向式行星滚柱丝杠副包括丝杠副壳,所述电机壳、所述减速器壳、所述丝杠副壳、所述钳头依次连接。
8、优选地,所述架体还包括手柄,所述手柄与所述电机壳相连;所述手柄的外侧安装有按钮;所述手柄的内侧安装有所述控制器和电机控制器;所述手柄电连接所述控制器,以向所述控制器输入控制信号;所述控制器、所述电机控制器、所述电机依次电连接,以控制所述电机的动作。
9、优选地,所述手柄的内侧还安装有电池,所述电池为所述电机和所述控制组件供电。
10、优选地,所述架体还包括底座,所述底座固定于所述手柄背离所述电机壳的一端。
11、优选地,所述动压接头上设有第一v型槽,所述静压接头上设有第二v型槽,所述第一v型槽与所述第二v型槽位置正对,以定位被压接的物件。
12、优选地,所述钳头上设有传感器安装座,所述传感器安装于所述传感器安装座内;所述钳头上设有供所述推杆经过的通孔,所述通孔的侧壁上设有监测孔;所述传感器的监测端伸入所述通孔,以监测所述推杆在所述通孔内的轴向位置。
13、优选地,所述钳头为开口朝上的u型槽。
14、本发明相对于现有技术取得了以下技术效果:
15、反向式行星滚柱丝杠副具有高精度的运动控制,确保每次压接操作的稳定性和一致性;动作组件的高效传动设计,提高了压接操作的速度和效率;传感器通过对推杆位置的监测,准确控制动压接头的复位过程,提高了操作的便捷性;反向式行星滚柱丝杠机构的设计相对简单,减少了维护成本和制造难度。
技术特征:
1.一种基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于,包括:
2.根据权利要求1所述的基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于:所述电机包括电机壳,所述减速器包括减速器壳,所述反向式行星滚柱丝杠副包括丝杠副壳,所述电机壳、所述减速器壳、所述丝杠副壳、所述钳头依次连接。
3.根据权利要求2所述的基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于:所述架体还包括手柄,所述手柄与所述电机壳相连;所述手柄的外侧安装有按钮;所述手柄的内侧安装有所述控制器和电机控制器;所述手柄电连接所述控制器,以向所述控制器输入控制信号;所述控制器、所述电机控制器、所述电机依次电连接,以控制所述电机的动作。
4.根据权利要求3所述的基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于:所述手柄的内侧还安装有电池,所述电池为所述电机和所述控制组件供电。
5.根据权利要求3所述的基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于:所述架体还包括底座,所述底座固定于所述手柄背离所述电机壳的一端。
6.根据权利要求1所述的基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于:所述动压接头上设有第一v型槽,所述静压接头上设有第二v型槽,所述第一v型槽与所述第二v型槽位置正对,以定位被压接的物件。
7.根据权利要求1所述的基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于:所述钳头上设有传感器安装座,所述传感器安装于所述传感器安装座内;所述钳头上设有供所述推杆经过的通孔,所述通孔的侧壁上设有监测孔;所述传感器的监测端伸入所述通孔,以监测所述推杆在所述通孔内的轴向位置。
8.根据权利要求1所述的基于反向式行星滚柱丝杠机构的电动压接钳,其特征在于:所述钳头为开口朝上的u型槽。
技术总结
本发明公开了一种基于反向式行星滚柱丝杠机构的电动压接钳,包括架体、动作组件和控制组件。架体包括钳头和静压接头。动作组件包括电机、减速器、反向式行星滚柱丝杠副和动压接头。电机能够正转和反转,动压接头用于在电机的驱动下靠近或远离静压接头,以夹持或释放物件。控制组件包括传感器和控制器。传感器安装于架体上,且电连接控制器,用于监测动压接头的位置信息,并将位置信息传输至控制器。控制器电连接电机,用于控制电机的动作。相比于现有技术,本发明提供了一种高精度、高效率、结构简洁且具有自动复位功能的新型电动压接工具。
技术研发人员:乔冠,张智杰,陈佳琪,罗宇
受保护的技术使用者:内蒙古工业大学
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!