一种基于柔性电活性材料的仿生海星机器人
本发明涉及水下机器人,具体为一种基于柔性电活性材料的仿生海星机器人。
背景技术:
1、随着科技的进步,仿生机器人在模拟自然生物行为上取得了显著成就。海星,是一种五辐射对称的无脊椎海洋动物,以其高度适应性和特征性腕部运动而闻名,为微型仿生机器人的设计提供了灵感。目前,若用传统电机驱动,不仅灵活性差,而且重量大、硬度高以及具有噪声等问题,其限制了仿生机器人作为侦查检测以及远距离巡航时的工作能力,对于探测水下生物十分不利。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于柔性电活性材料的仿生海星机器人,通过采用具有柔性的电活性材料,解决了上述背景技术中提出的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
5、根据本发明的第一方面,提供了一种基于柔性电活性材料的仿生海星机器人,包括上极板、下极板、圆形壳体和五个驱动腕,五个所述驱动腕依次固定在所述上极板和下极板之间,所述圆形壳体固定在所述上极板上形成圆形腔体,所述圆形腔体内设有驱动控制器和电源,所述上极板和下极板通过导线与所述电源连接,五个所述驱动腕均采用柔性电活性材料制备并且与驱动控制器电连接。
6、优选的,所述驱动腕包括柔性电活性驱动片以及包覆在所述柔性电活性驱动片表面的导电电极薄膜。
7、优选的,所述柔性电活性驱动片选自离子聚合物金属复合材料驱动片。
8、优选的,所述导电电极薄膜选自pt电极薄膜、ag电极薄膜或au电极薄膜中的至少一种。
9、优选的,所述上极板和下极板之间设有灯带,所述灯带位于所述上极板和下极板压合所述驱动腕的缝隙处。
10、优选的,所述圆形壳体的顶部还设有球形摄像头。
11、优选的,五个所述驱动腕呈散射状等距的固定在所述上极板和下极板之间,且五个所述驱动腕均独立的通过上极板和下极板与驱动控制器电连接。
12、优选的,所述仿生海星机器人的每个缝隙均采用防水胶水密封。
13、(三)有益效果
14、本发明提供了一种基于柔性电活性材料的仿生海星机器人。具备以下有益效果:
15、(1)本方案提供的一种基于柔性电活性材料的仿生海星机器人,采用柔性电活性材料,通过电信号的调节,可以精确控制仿生海星机器人的运动和形变速度,可以在低电压驱动,实现快速响应。
16、(2)本方案提供的一种基于柔性电活性材料的仿生海星机器人,结构简单,质轻小巧,易操作,能耗小,仿生效果逼真,且可以低成本的进行规模化生产。
17、(3)本方案提供的一种基于柔性电活性材料的仿生海星机器人,采用柔性电活性材料可以实现仿生海星机器人的上浮、下沉、移动和爬行等运动,具有优异的灵活性和适应性,此外还可以通过独立控制每个驱动腕,可以实现对仿生海星机器人的形态和运动的精确操控。
18、(4)本方案提供的一种基于柔性电活性材料的仿生海星机器人,可以应用于水下探索,环境检测,教育展示等多个应用场景,具有优异的应用价值和市场前景。
技术特征:
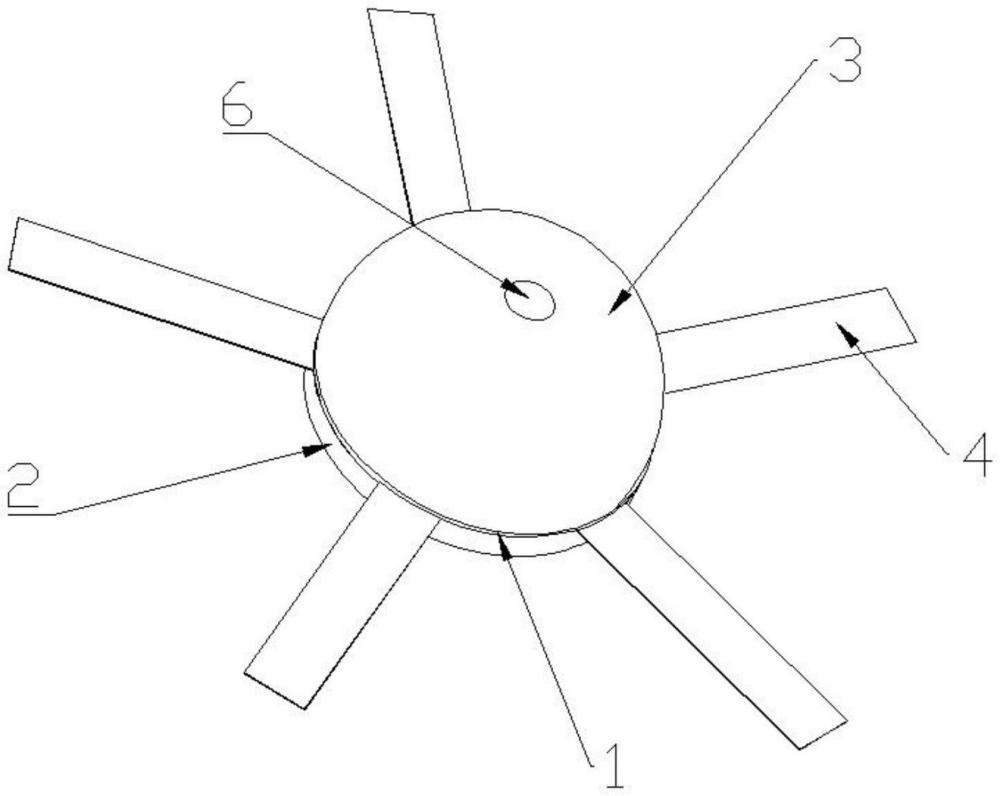
1.一种基于柔性电活性材料的仿生海星机器人,其特征在于:包括上极板(1)、下极板(2)、圆形壳体(3)和五个驱动腕(4),五个所述驱动腕(4)依次固定在所述上极板(1)和下极板(2)之间,所述圆形壳体(3)固定在所述上极板(1)上形成圆形腔体,所述圆形腔体内设有驱动控制器和电源,所述上极板(1)和下极板(2)通过导线与所述电源连接,五个所述驱动腕(4)均采用柔性电活性材料制备并且与驱动控制器电连接。
2.根据权利要求1所述的一种基于柔性电活性材料的仿生海星机器人,其特征在于:所述驱动腕(4)包括柔性电活性驱动片(4-1)以及包覆在所述柔性电活性驱动片(4-1)表面的导电电极薄膜(4-2)。
3.根据权利要求2所述的一种基于柔性电活性材料的仿生海星机器人,其特征在于:所述柔性电活性驱动片(4-1)选自离子聚合物金属复合材料驱动片。
4.根据权利要求2所述的一种基于柔性电活性材料的仿生海星机器人,其特征在于:所述导电电极薄膜(4-2)选自pt电极薄膜、ag电极薄膜或au电极薄膜中的至少一种。
5.根据权利要求1所述的一种基于柔性电活性材料的仿生海星机器人,其特征在于:所述上极板(1)和下极板(2)之间设有灯带(5),所述灯带(5)位于所述上极板(1)和下极板(2)压合所述驱动腕(4)的缝隙处。
6.根据权利要求1所述的一种基于柔性电活性材料的仿生海星机器人,其特征在于:所述圆形壳体(3)的顶部还设有球形摄像头(6)。
7.根据权利要求1所述的一种基于柔性电活性材料的仿生海星机器人,其特征在于:五个所述驱动腕(4)呈散射状等距的固定在所述上极板(1)和下极板(2)之间,且五个所述驱动腕(4)均独立的通过上极板(1)和下极板(2)与驱动控制器电连接。
8.根据权利要求1所述的一种基于柔性电活性材料的仿生海星机器人,其特征在于:所述仿生海星机器人的每个缝隙均采用防水胶水密封。
技术总结
本发明提供一种基于柔性电活性材料的仿生海星机器人。所述仿生海星机器人包括上极板、下极板、圆形壳体和五个驱动腕,五个驱动腕依次固定在上极板和下极板之间,圆形壳体固定在上极板上形成圆形腔体,圆形腔体内设有驱动控制器和电源,上极板和下极板通过导线与电源连接,五个驱动腕均采用柔性电活性材料制备并且与驱动控制器电连接,其中,驱动腕包括柔性电活性驱动片以及包覆在柔性电活性驱动片表面的导电电极薄膜。本发明提供的仿生海星机器人,采用柔性电活性材料,通过电信号的调节,可以精确控制仿生海星机器人的运动和形变速度,可在低电压下驱动,实现快速响应,并且结构简单,易操作,能耗小,仿生效果逼真,可低成本的进行规模化生产。
技术研发人员:吴玉娇,崔琦渊
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!