一种用于物料运输的智能桁架机械手的制作方法
本发明属于桁架机械手,具体是一种用于物料运输的智能桁架机械手。
背景技术:
1、桁架机械手作为一种重要的工业机器人,其广泛运用在汽车制造、电子装配、物流仓储等多种工业场景中,并高效、准确地执行物料搬运、装配、检测等任务;传统技术中桁架机械手在物料运输中,尤其涉及工字轮的转运,主要采用叉取搬运的方式,通过专用夹具插入工字轮的孔洞或凹槽中进行提升和移动,但其操作难度高,容易对工字轮的内部结构造成刮擦或挤压损伤;而目前较为常见的内撑涨机构,利用可调节的涨紧结构固定工字轮内部,实现更安全的搬运,但其涨紧力度难以把控,采用过度强力的涨紧方式会对工字轮内部造成撑裂,同时导致工字轮发生不可逆的塑性形变,影响其后续的精确定位和旋转平稳性,且达到的涨紧夹持效果一般。
2、因此,有必要提供一种用于物料运输的智能桁架机械手,以解决上述背景技术中提出的问题。
技术实现思路
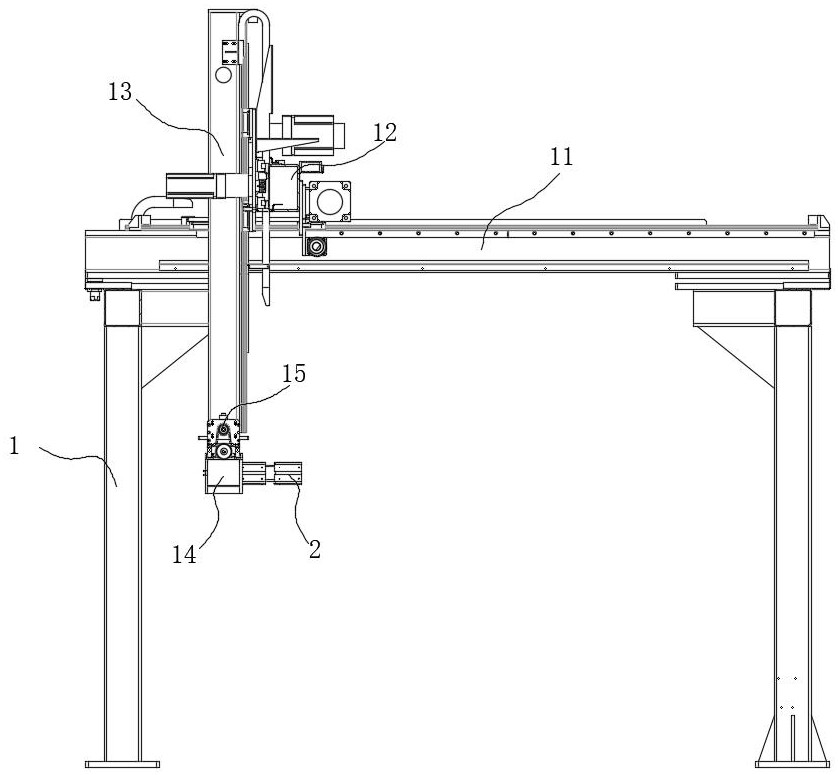
1、为实现上述目的,本发明提供如下技术方案:一种用于物料运输的智能桁架机械手,其包括两侧对称分布的方形立柱,所述方形立柱之间连接有平行设置的两个x轴梁架,所述x轴梁架上滑动安装有y轴梁架,所述y轴梁架上设置有第一行走机构,所述y轴梁架通过第一行走机构沿x轴梁架位移调节,所述y轴梁架上竖直设置有机械臂z轴,所述机械臂z轴通过第二行走机构沿所述y轴梁架上位移调节,所述机械臂z轴与所述第二行走机构相竖直滑动连接;
2、所述机械臂z轴的下端安装有内撑涨机构,所述内撑涨机构能够通过机械臂z轴滑动深入各工字轮的中部,并达到预设深度后进行涨紧,从而对工字轮进行夹持运输;
3、所述内撑涨机构包括第一内撑涨单元,其下方同圆心的设置有第二内撑涨单元,所述第一内撑涨单元的下方竖直固定有多个连杆,所述连杆的一端均与所述第二内撑涨单元相滑动连接,所述第一内撑涨单元下方转动连接有螺纹杆,所述螺纹杆通过螺纹啮合作用与所述第二内撑涨单元相滑动连接;
4、所述机械臂z轴上设置有图像扫描模块,所述图像扫描模块通过视觉传感器对各工字轮图像获取,从而获得当下工字轮的内径规格以及负载情况,所述第一内撑涨单元上固定有定位盘,所述定位盘内滑动连接有连柱,所述连柱与定位盘之间分布有测重传感器;所述内撑涨机构采用预设涨紧动作对各工字轮进行夹持提升,从而通过测重传感器获取各工字轮的测重数据;
5、当工字轮的测重数据高于阈值,所述第一内撑涨单元与第二内撑涨单元根据测重传感器的测重数据结合工字轮负载图像,分析工字轮荷载重心,从而修正预设涨紧动作;此时,所述第一内撑涨单元或第二内撑涨单元优先接触在工字轮内壁重心位置,而后剩下的另一第一内撑涨单元或第二内撑涨单元选取最优点进行涨紧。
6、进一步,作为优选,所述机械臂z轴的下端固定有安装座,所述安装座内转动连接有转轴,所述内撑涨机构的一端与所述转轴相固定;
7、所述安装座上设置有主动轮,所述主动轮通过传动链与所述转轴相连接传动。
8、进一步,作为优选,所述第一内撑涨单元与第二内撑涨单元的组成结构相同,所述第一内撑涨单元包括管体,其内部圆周设置有多个涨紧板,各所述涨紧板均径向滑动连接在所述管体上,所述管体内中心固定有轴套,所述轴套内滑动连接有中心管,所述轴套上固定有连接衬件一,所述管体内分布有多个与所述涨紧板相对应的铰接架,所述铰接架被设置为x形支架结构,所述铰接架均与所述连接衬件一相铰接;所述管体内竖直滑动连接有内轴体,所述中心管上固定有连盘,所述连盘通过下方设置的支杆与所述内轴体相连接,所述内轴体上设置有连接衬件二,所述铰接架与所述连接衬件二相铰接;
9、各所述铰接架上远离管体圆心的上端点与所述涨紧板相转动连接,所述涨紧板上竖直设置有滑槽,各所述铰接架上远离管体圆心的下端点通过轴销与所述滑槽相滑动连接;
10、所述管体的上方设有密封气仓,所述密封气仓内滑动连接有活塞,所述中心管的上端与活塞相连接。
11、进一步,作为优选,所述中心管竖直滑动中控制内轴体上下同步位移调节,使得内轴体上方的连接衬件二靠近或远离连接衬件一;
12、所述密封气仓外连接有气管。
13、进一步,作为优选,所述中心管的下端滑动连接有内杆,所述内杆与中心管之间设置有弹簧,所述连接衬件二固定在内杆上;
14、所述内轴体上转动连接有导管,所述内杆的下端滑动穿接在导管内,所述导管的侧壁开设有导槽,所述内杆上固定有定位销,所述定位销沿所述导槽滑动。
15、进一步,作为优选,所述导管在旋转调节中通过定位销与导槽的滑动连接作用控制内杆上下微调;所述内轴体内固定有双向电机,所述双向电机的输出端与所述导管相连接。
16、进一步,作为优选,所述涨紧板的侧壁上均设有弹性膜,所述弹性膜内填充有砂粒;
17、所述涨紧板上排布有多个超声振动器
18、进一步,作为优选,所述第一内撑涨单元与第二内撑涨单元根据工字轮材料特性、涂层光滑度以及内壁结构通过双向电机的正反向旋转对涨紧板涨紧强度进行微调,此时各超声振动器能够对弹性膜内的砂粒提供超声振动,使其充分扩散。
19、与现有技术相比,本发明的有益效果是:
20、本发明中对于物料搬运,尤其涉及工字轮的搬运、运输,采用的内撑涨机构能够优先采用预设涨紧动作对各工字轮进行夹持提升,从而获取工字轮的负载重量,而后基于工字轮荷载重心修正预设涨紧动作,以便尽可能的以工字轮荷载重心为夹持中心对工字轮进行夹持搬运,其中主要设置的第一内撑涨单元与第二内撑涨单元能够根据工字轮内径采用多个涨紧板接触在工字轮内壁,而后基于工字轮涂层光滑度以及内壁结构通过弹性膜中的砂粒与工字轮内壁充分接触。
技术特征:
1.一种用于物料运输的智能桁架机械手,其特征在于:其包括两侧对称分布的方形立柱(1),所述方形立柱(1)之间连接有平行设置的两个x轴梁架(11),所述x轴梁架(11)上滑动安装有y轴梁架,所述y轴梁架上设置有第一行走机构,所述y轴梁架通过第一行走机构沿x轴梁架(11)位移调节,所述y轴梁架上竖直设置有机械臂z轴(13),所述机械臂z轴(13)通过第二行走机构(12)沿所述y轴梁架上位移调节,所述机械臂z轴(13)与所述第二行走机构(12)相竖直滑动连接;
2.根据权利要求1所述的一种用于物料运输的智能桁架机械手,其特征在于:所述机械臂z轴(13)的下端固定有安装座(14),所述安装座(14)内转动连接有转轴,所述内撑涨机构(2)的一端与所述转轴相固定;
3.根据权利要求1所述的一种用于物料运输的智能桁架机械手,其特征在于:所述第一内撑涨单元(3)与第二内撑涨单元(22)的组成结构相同,所述第一内撑涨单元(3)包括管体(31),其内部圆周设置有多个涨紧板(32),各所述涨紧板(32)均径向滑动连接在所述管体(31)上,所述管体(31)内中心固定有轴套(33),所述轴套(33)内滑动连接有中心管(34),所述轴套(33)上固定有连接衬件一(35),所述管体(31)内分布有多个与所述涨紧板(32)相对应的铰接架(36),所述铰接架(36)被设置为x形支架结构,所述铰接架(36)均与所述连接衬件一(35)相铰接;所述管体(31)内竖直滑动连接有内轴体(4),所述中心管(34)上固定有连盘(37),所述连盘(37)通过下方设置的支杆与所述内轴体(4)相连接,所述内轴体(4)上设置有连接衬件二,所述铰接架(36)与所述连接衬件二相铰接;
4.根据权利要求3所述的一种用于物料运输的智能桁架机械手,其特征在于:所述中心管(34)竖直滑动中控制内轴体(4)上下同步位移调节,使得内轴体(4)上方的连接衬件二靠近或远离连接衬件一(35);
5.根据权利要求3所述的一种用于物料运输的智能桁架机械手,其特征在于:所述中心管(34)的下端滑动连接有内杆(41),所述内杆(41)与中心管(34)之间设置有弹簧,所述连接衬件二固定在内杆(41)上;
6.根据权利要求5所述的一种用于物料运输的智能桁架机械手,其特征在于:所述导管(42)在旋转调节中通过定位销与导槽(43)的滑动连接作用控制内杆(41)上下微调;所述内轴体(4)内固定有双向电机(44),所述双向电机(44)的输出端与所述导管(42)相连接。
7.根据权利要求6所述的一种用于物料运输的智能桁架机械手,其特征在于:所述涨紧板(32)的侧壁上均设有弹性膜(5),所述弹性膜(5)内填充有砂粒;
8.根据权利要求7所述的一种用于物料运输的智能桁架机械手,其特征在于:所述第一内撑涨单元(3)与第二内撑涨单元(22)根据工字轮材料特性、涂层光滑度以及内壁结构通过双向电机(44)的正反向旋转对涨紧板(32)涨紧强度进行微调,此时各超声振动器(51)能够对弹性膜(5)内的砂粒提供超声振动,使其充分扩散。
技术总结
本发明公开了一种用于物料运输的智能桁架机械手,属于桁架机械手领域,其包括两侧对称分布的方形立柱,所述方形立柱之间连接有平行设置的两个X轴梁架,所述X轴梁架上滑动安装有Y轴梁架,所述Y轴梁架上设置有第一行走机构,所述Y轴梁架上竖直设置有机械臂Z轴,所述机械臂Z轴通过第二行走机构沿所述Y轴梁架上位移调节;所述机械臂Z轴的下端安装有内撑涨机构;本发明尤其涉及工字轮的搬运、运输,采用的内撑涨机构能够采用预设涨紧动作对各工字轮进行夹持提升,而后基于工字轮荷载重心修正预设涨紧动作,提高运输稳定性。
技术研发人员:刘世严,蒯海波,徐军,徐飞
受保护的技术使用者:苏州冠鸿智能装备有限公司
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!