一种用于机械臂的传感器制造方法及机器人与流程
本发明涉及传感器,尤其涉及一种用于机械臂的传感器制造方法及机器人。
背景技术:
1、随着工业自动化的发展,机械臂在制造业、服务业等各个领域的应用日益广泛。机械臂需要具备灵敏的触觉能力,以便在操作过程中能够精确地感知和反馈外界压力。
2、当前技术中,由于机械臂表面具有复杂曲面,传统的压力传感器难以在其表面实现全面覆盖,导致机械臂的感知精度和可靠性低。
技术实现思路
1、本发明的目的在于提供一种用于机械臂的传感器制造方法及机器人,以解决机械臂表面的压力传感器难以实现全面覆盖,导致机械臂的感知精度和可靠性受到限制的技术问题。
2、第一方面,本发明提供一种用于机械臂的传感器制造方法,所述机械臂的外表区域包括曲面区域,所述制造方法包括:
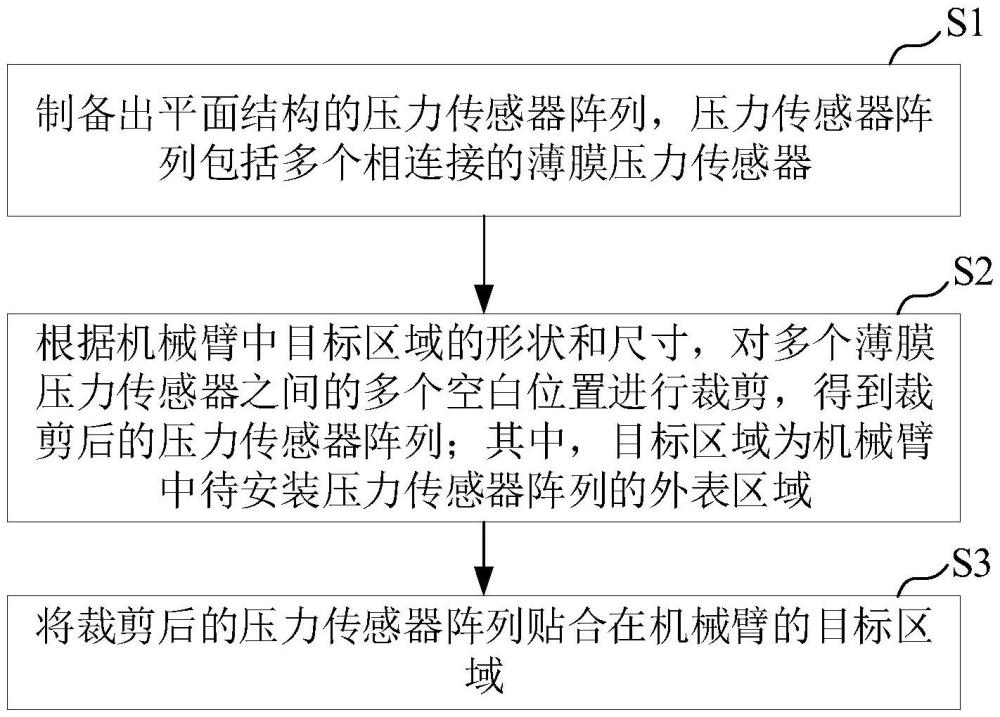
3、制备出平面结构的压力传感器阵列,所述压力传感器阵列包括多个相连接的薄膜压力传感器;
4、根据所述机械臂中目标区域的形状和尺寸,对多个所述薄膜压力传感器之间的多个空白位置进行裁剪,得到裁剪后的压力传感器阵列;其中,所述目标区域为所述机械臂中待安装所述压力传感器阵列的外表区域;
5、将所述裁剪后的压力传感器阵列贴合在所述机械臂的目标区域。
6、可选地,所述将所述裁剪后的压力传感器阵列贴合在所述机械臂的目标区域之后,还包括:
7、将保护套贴合在所述裁剪后的压力传感器阵列的外表区域。
8、可选地,所述根据所述机械臂中目标区域的形状和尺寸,对多个所述薄膜压力传感器之间的多个空白位置进行裁剪,包括:
9、将平面结构的压力传感器阵列放置于所述机械臂的目标区域的对齐位置;
10、根据所述机械臂中目标区域的形状和尺寸,依次在多个所述对齐位置上对多个所述薄膜压力传感器之间的多个空白位置处画出指示线;
11、沿多个所述指示线对多个所述薄膜压力传感器之间的多个空白位置进行裁剪。
12、可选地,所述制备出平面结构的压力传感器阵列,包括:
13、将压敏材料制备成多个薄膜压力传感器的压敏层,所述压敏层用于将压力信号转化为电信号;以及
14、通过丝印或刻蚀工艺在基底上加工导电线路,以形成多个薄膜压力传感器的检测层,所述检测层用于检测电信号的电能参数;
15、将所述压敏层覆盖在所述检测层上,得到平面结构的压力传感器阵列。
16、可选地,所述将压敏材料制备成多个薄膜压力传感器的压敏层,包括:
17、按照预设比例将导电参杂物与非导电聚合物进行混合,得到压敏材料;
18、将所述压敏材料放入模具并设置所述模具的模压参数;
19、在所述模压参数下对所述模具中的压敏材料进行注塑加工,得到多个薄膜压力传感器的压敏层。
20、可选地,所述导电参杂物包括石墨烯,所述石墨烯的参杂比例为0.5%至10%。
21、可选地,所述模压参数为3mpa-10mpa。
22、第二方面,本发明提供一种用于机械臂的传感器制造方法,所述机械臂的外表区域包括曲面区域,所述制造方法包括:
23、在所述机械臂的目标区域中加工导电线路,以形成多个薄膜压力传感器的检测层,所述检测层用于检测电信号的电能参数;其中,所述目标区域为所述机械臂中待安装所述压力传感器的外表区域;
24、通过二次注塑或者喷涂的方式将压敏材料加工到所述检测层的外表面,以生成多个薄膜压力传感器的压敏层,所述压敏层用于将压力信号转化为电信号;其中,所述压敏层与所述检测层形成与所述目标区域相贴合的压力传感器阵列。
25、可选地,所述导电线路通过激光工艺在所述目标区域烧结得到;或者
26、所述导电线路通过在所述目标区域喷涂导电油墨并烘干固化得到;或者
27、所述导电线路通过在所述目标区域电镀并去除多余线路得到。
28、第三方面,本发明提供一种机器人,其包括机械臂和压力传感器阵列,所述压力传感器阵列根据所述传感器制造方法得到。
29、可选地,所述机器人还包括保护套,所述保护套贴合在所述压力传感器阵列的外表。
30、本发明提供一种用于机械臂的传感器制造方法,其有益效果在于:
31、先制备出平面结构的压力传感器阵列,然后根据机械臂中目标区域的形状和尺寸对压力传感器阵列中多个薄膜压力传感器之间的多个空白位置进行裁剪,得到裁剪后的压力传感器阵列,最后将裁剪后的压力传感器阵列贴合在机械臂的目标区域。本发明通过将平面结构的压力传感器阵列裁剪成曲面结构的压力传感器阵列,以便于覆盖在机械臂的曲面区域并全面贴合在机械臂的目标区域,从而提高机械臂的感知精度和可靠性。
技术特征:
1.一种用于机械臂的传感器制造方法,其特征在于,所述机械臂的外表区域包括曲面区域,所述制造方法包括:
2.根据权利要求1所述的用于机械臂的传感器制造方法,其特征在于,所述将所述裁剪后的压力传感器阵列贴合在所述机械臂的目标区域之后,还包括:
3.根据权利要求1所述的用于机械臂的传感器制造方法,其特征在于,所述根据所述机械臂中目标区域的形状和尺寸,对多个所述薄膜压力传感器之间的多个空白位置进行裁剪,包括:
4.根据权利要求1所述的用于机械臂的传感器制造方法,其特征在于,所述制备出平面结构的压力传感器阵列,包括:
5.根据权利要求4所述的用于机械臂的传感器制造方法,其特征在于,所述将压敏材料制备成多个薄膜压力传感器的压敏层,包括:
6.根据权利要求5所述的用于机械臂的传感器制造方法,其特征在于,所述导电参杂物包括石墨烯,所述石墨烯的参杂比例为0.5%至10%。
7.根据权利要求5所述的用于机械臂的传感器制造方法,其特征在于,所述模压参数为3mpa-10mpa。
8.一种用于机械臂的传感器制造方法,其特征在于,所述机械臂的外表区域包括曲面区域,所述制造方法包括:
9.根据权利要求8所述的用于机械臂的传感器制造方法,其特征在于,所述导电线路通过激光工艺在所述目标区域烧结得到;或者
10.一种机器人,其特征在于,包括机械臂和压力传感器阵列,所述压力传感器阵列根据权利要求1至9中任一项所述的传感器制造方法得到。
11.根据权利要求10所述的机器人,其特征在于,所述机器人还包括保护套,所述保护套贴合在所述压力传感器阵列的外表。
技术总结
本发明涉及传感器技术领域,公开了一种用于机械臂的传感器制造方法及机器人。所述机械臂的外表区域包括曲面区域,所述制造方法包括:制备出平面结构的压力传感器阵列,所述压力传感器阵列包括多个相连接的薄膜压力传感器;根据所述机械臂中目标区域的形状和尺寸,对多个所述薄膜压力传感器之间的多个空白位置进行裁剪,得到裁剪后的压力传感器阵列;其中,所述目标区域为所述机械臂中待安装所述压力传感器阵列的外表区域;将所述裁剪后的压力传感器阵列贴合在所述机械臂的目标区域。本发明旨在解决机械臂表面的压力传感器难以全面覆盖,导致机械臂的感知精度和可靠性受到限制的技术问题。
技术研发人员:吴灿俊,黄稀荻,匡正
受保护的技术使用者:墨现科技(东莞)有限公司
技术研发日:
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!