一种机器人末端夹持机构的制作方法
本发明涉及机器人执行机构,具体涉及一种机器人末端夹持机构。
背景技术:
1、水质监测站是为了保护水资源、实施环境保护和灾害预警而设立的基础设施,需要定期采集水样进行水质分析,以评估水体的健康状况、监测水污染、指导水质改善措施,并为供水、水环境保护等方面提供科学依据。电极是水质监测中常用的测量工具,需要定期清洗和校准,目前的水质监测站主要靠人工进行电极清洗,电极清洗对于技人员的技术要求较高,存在操作误差、人为干扰等影响,最终导致水质监测数据的准确性低下。为了克服人工清洗电极的缺陷,利用机器人实现电极清洗。
2、机器人在进行电极清洗工作时需要对电极进行夹取工作,即利用夹持机构对电极进行清洗,现有的夹持机构在应对各种类型和规格的电极时,受电极多样性的影响,如形状(柱状、片状、圆球状等)、大小和材料,可能需要定制化的工具或程序,其增加了开发和维护的复杂性,而且表现出夹持机构鲁棒性较差,无法适应不同类型电极的缺陷。
技术实现思路
1、有鉴于此,为了解决上述现有夹持机构夹取鲁棒性较差,无法适应不同类型电极的技术问题,本发明提供了一种机器人末端夹持机构。
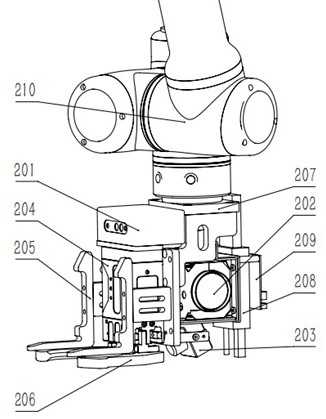
2、一种机器人末端夹持机构,包括夹持机构本体,所述夹持机构本体包括多动夹块、钳爪、若干个液压杆和压力传感器,将所有的所述液压杆均匀划分为两部分,一部分液压杆均匀分布在所述多动夹块的一个钳爪上,另一部分液压杆均匀分布在所述多动夹块的另一个钳爪上,将压力传感器置于液压杆上用于采集液压杆的压力数据;所述夹持机构本体还包括夹持控制模块,所述夹持控制模块包括液压杆数据获取模块和液压杆液压控制模块,所述液压杆数据获取模块信号连接所述液压杆液压控制模块;
3、所述液压杆数据获取模块用于获取当前时刻各个所述液压杆的压力传感器的压力数据和所夹取工件的接触面积;所述液压杆液压控制模块用于根据接收到所述压力数据和所述接触面积确定各个所述液压杆的压力承受指标;根据各个所述液压杆的压力数据和初始液压变化速率,确定各个所述液压杆的目标液压变化速率;根据各个所述液压杆的压力承受指标和所述目标液压变化速率,控制所述钳爪对应的各个液压杆的液压进行夹取工件操作。
4、进一步地,所述获取当前时刻各个所述液压杆的压力传感器的压力数据和所夹取工件的接触面积,包括:
5、获取夹持机构中多动夹块的边缘信息和运动方向,基于所述边缘信息和运动方向确定所述夹持机构的夹块张开距离;
6、使所述夹块张开距离对应的张开钳爪进行闭合操作,当所述钳爪对应的任一液压杆的压力传感器产生压力数据时停止闭合操作,获取当前时刻各个所述液压杆的压力数据和所夹取工件的接触面积。
7、进一步地,还包括:
8、从所述夹持机构的多动夹块开始执行张开操作时,获取当前时刻的夹持机构中多动夹块的边缘信息和运动方向。
9、进一步地,所述获取当前时刻的夹持机构中多动夹块的边缘信息和运动方向,包括:
10、获取当前时刻的夹持机构中多动夹块的张开操作图像,利用边缘检测对所述张开操作图像进行图像处理,得到多动夹块的各个边缘,作为边缘信息;将多动夹块的张开方向作为多动夹块的运动方向。
11、进一步地,所述基于所述边缘信息和运动方向确定所述夹持机构的夹块张开距离,包括:
12、基于所述当前时刻的夹持机构中多动夹块的边缘信息和运动方向,计算多动夹块的两个目标边缘之间的距离,组成当前时刻的距离序列;
13、当所述当前时刻的距离序列中大于距离阈值的距离数目小于预设数目时,按照预设采集频率,获取下一时刻的夹持机构中多动夹块的边缘信息和运动方向,进而获得下一时刻的距离序列;其中,所述下一时刻为当前时刻的下一时刻;
14、不断比较距离序列中大于距离阈值的距离数目和预设数目的大小,直至某个时刻的距离序列中的距离数目不小于预设数目,将该时刻的距离序列中的各个距离作为所述夹持机构的夹块张开距离。
15、进一步地,所述多动夹块的两个目标边缘的获取步骤包括:
16、从多动夹块对应多个边缘中选取出与所述运动方向垂直的边缘,作为待定边缘;将多动夹块的两个钳爪分别作为第一钳爪和第二钳爪,计算第一钳爪的各个待定边缘的中心点与第二钳爪的各个待定边缘的中心点之间的距离,将最小距离对应的两个待定边缘作为目标边缘。
17、进一步地,所述获取当前时刻各个所述液压杆的压力传感器的压力数据,包括:
18、根据各个所述液压杆的对称分布情况,确定各对液压杆;
19、对于各对液压杆,当一对液压杆同时具备大于零的压力数据时,获取当前时刻各个所述液压杆的压力传感器的压力数据。
20、进一步地,所述根据接收到所述压力数据和所述接触面积确定各个所述液压杆的压力承受指标,包括:
21、对各个所述液压杆的压力数据和接触面积均进行归一化处理,获得各个液压杆的压力数据的归一化值和接触面积的归一化值;
22、根据同一液压杆的压力数据的归一化值和接触面积的归一化值的比值情况,确定对应液压杆的压力承受指标。
23、进一步地,所述根据各个所述液压杆的压力数据和初始液压变化速率,确定各个所述液压杆的目标液压变化速率,包括:
24、确定各个液压杆的压力数据的归一化值的负相关值,将所述负相关值作为对应的液压杆的液压变化速率调整系数;
25、计算各个液压杆的初始液压变化速率与其对应的所述液压变化速率调整系数的乘积,作为对应液压杆的目标液压变化速率。
26、进一步地,所述根据各个所述液压杆的压力承受指标和所述目标液压变化速率,控制所述钳爪对应的各个液压杆的液压进行夹取工件操作,包括:
27、对于任一液压杆,当该液压杆的压力承受指标大于预设承受阈值时,停止增加该液压杆的液压,当该液压杆的压力承受指标不大于预设承受阈值时,按照该液压杆的目标液压变化速率增加液压。
28、本发明至少具有如下有益效果:
29、在夹持机构中多动夹块的钳爪上设置多个液压杆,可以提升夹持机构的夹取能力,并且可以夹取不同类型或规格的工件,有效增强了夹持机构的夹取鲁棒性;在控制液压杆的液压时,通过量化的压力承受指标和目标液压变化速率实现,可以避免夹取不稳或夹取压力过大导致的工件损坏,可以确保夹持机构夹取过程的安全性;相比统一控制所有液压杆的液压情况,为每个液压杆均确定一个其对应的压力承受指标和目标液压变化速率,可以提高液压杆控制的精确度,进一步提升机器人末端夹持机构的夹持效果。
技术特征:
1.一种机器人末端夹持机构,其特征在于,包括夹持机构本体,所述夹持机构本体包括多动夹块、钳爪、若干个液压杆和压力传感器,将所有的所述液压杆均匀划分为两部分,一部分液压杆均匀分布在所述多动夹块的一个钳爪上,另一部分液压杆均匀分布在所述多动夹块的另一个钳爪上,将压力传感器置于液压杆上用于采集液压杆的压力数据;所述夹持机构本体还包括夹持控制模块,所述夹持控制模块包括液压杆数据获取模块和液压杆液压控制模块,所述液压杆数据获取模块信号连接所述液压杆液压控制模块;
2.根据权利要求1所述的机器人末端夹持机构,其特征在于,所述获取当前时刻各个所述液压杆的压力传感器的压力数据和所夹取工件的接触面积,包括:
3.根据权利要求2所述的机器人末端夹持机构,其特征在于,还包括:
4.根据权利要求3所述的机器人末端夹持机构,其特征在于,所述获取当前时刻的夹持机构中多动夹块的边缘信息和运动方向,包括:
5.根据权利要求4所述的机器人末端夹持机构,其特征在于,所述基于所述边缘信息和运动方向确定所述夹持机构的夹块张开距离,包括:
6.根据权利要求5所述的机器人末端夹持机构,其特征在于,所述多动夹块的两个目标边缘的获取步骤包括:
7.根据权利要求1所述的机器人末端夹持机构,其特征在于,所述获取当前时刻各个所述液压杆的压力传感器的压力数据,包括:
8.根据权利要求1所述的机器人末端夹持机构,其特征在于,所述根据接收到所述压力数据和所述接触面积确定各个所述液压杆的压力承受指标,包括:
9.根据权利要求8所述的机器人末端夹持机构,其特征在于,所述根据各个所述液压杆的压力数据和初始液压变化速率,确定各个所述液压杆的目标液压变化速率,包括:
10.根据权利要求1所述的机器人末端夹持机构,其特征在于,所述根据各个所述液压杆的压力承受指标和所述目标液压变化速率,控制所述钳爪对应的各个液压杆的液压进行夹取工件操作,包括:
技术总结
本发明涉及机器人执行机构技术领域,具体涉及一种机器人末端夹持机构,包括夹持机构本体,所述夹持机构本体包括多动夹块、钳爪、若干个液压杆和压力传感器,将所有的所述液压杆均匀划分为两部分,一部分液压杆均匀分布在所述多动夹块的一个钳爪上,另一部分液压杆均匀分布在所述多动夹块的另一个钳爪上,将压力传感器置于液压杆上;所述夹持机构本体还包括夹持控制模块,所述夹持控制模块包括液压杆数据获取模块和液压杆液压控制模块。本发明通过设置若干个液压杆并控制液压杆的液压情况,提高了机器人末端夹持机构的夹取鲁棒性,进一步提升了夹持机构的夹取能力。
技术研发人员:杨超,郑建兵,陶磊,林旗,汪梦飞
受保护的技术使用者:浙江环茂自控科技有限公司
技术研发日:
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!