一种长骨骨折手术机器人复位位姿误差在线补偿方法
本发明涉及机器人制造调试,尤其涉及一种长骨骨折手术机器人复位位姿误差在线补偿方法。
背景技术:
1、在机器人的制造、安装及调试阶段,会引入一定的误差。此外,传动系统在长期运作过程中可能出现的间隙、磨损等问题也会进一步累积误差。这些因素共同作用,可能导致机器人连杆的参数误差,从而在机器人执行运动任务时,实际到达的位姿与预定的理论位姿之间存在偏差。因此,采取相应的补偿措施是确保其精确定位和高效执行的关键。
2、机器人末端位姿误差补偿方法是一种有效提升位姿精度的策略,它主要包含离线补偿和在线补偿两大类。离线补偿策略在机器人的工作空间中对一系列末端位姿进行误差测量,并基于这些数据构建机器人的运动误差模型。通过这种方式,可以在机器人操作前准确估计并修正可能出现的位姿偏差,从而显著提高机器人执行任务时的定位精度。机器人运动学参数标定是常用的离线补偿方法,已有的文献提出了一种考虑机器人基坐标系位姿误差的运动学模型参数标定方法、基于机器人末端距离误差的运动学参数误差标定方法、基于空间网格的位姿误差补偿方法、基于数控系统驱动提出工业机器人定位误差补偿方法、将机器人末端执行器的姿态误差等价为驱动关节的输入误差,以关节输入为自变量建立机器人误差模型,并通过离线识别和在线补偿实验验证了模型的有效性。但是离线补偿方法无法补偿机器人工作时受环境、负载等影响导致的位姿误差,位姿精度提升程度有限。
3、而机器人末端位姿误差在线补偿法,利用高精度的测量设备获取机器人末端位姿误差,然后通过误差补偿算法修正机器人末端位姿,使机器人在工作过程中不断调整末端位姿逼近目标位姿,具有实时性。已有的在线补偿方法是根据激光跟踪仪反馈的数据计算机器人实际位姿与目标位姿之间的误差,然后通过kuka机器人提供的机器人传感器接口在线补偿位姿误差,但该方法没有给出位姿误差转换到关节误差的具体计算过程。还有一种工业机器人定位误差在线自适应补偿方法,通过自主判断误差等级变化和自适应优化位姿映射模型方法,确保在线补偿精度满足要求,但该方法繁琐复杂。使用激光跟踪仪实时测量机器人末端位置,通过二阶扰动观测器识别外部扰动,在扰动观测的基础上以滑模控制器完成机器人的鲁棒控制,提高机器人绝对定位精度,但没有对机器人末端姿态进行误差补偿。上述在线补偿方式均采用价格昂贵的激光跟踪仪反馈机器人位姿误差。
4、在手术机器人末端安装了手术工具,安装过程会出现一定的误差,手术机器人几何误差、非几何误差和系统误差的影响会导致手术过程中机器人末端期望位姿与实际位姿存在偏差。
5、另一方面,手术系统包括机器人基坐标系、患者空间坐标系和图像空间坐标系等,这些坐标系之间的配准精度对手术机器人末端位姿精度有着较大的影响。安装在机器人末端的手术工具在患者空间下的定位精度决定了手术系统执行手术骨折复位的精度。
6、不难看出,现有技术中还存在诸多问题,需要对现有的手术机器人复位位姿误差的补偿方法进行改进,以克服现有技术的缺陷。
技术实现思路
1、为此,为了解决现有技术中的上述问题,本发明提出一种长骨骨折手术机器人复位位姿误差在线补偿方法。
2、本发明通过以下技术手段解决上述问题:
3、一种长骨骨折手术机器人复位位姿误差在线补偿方法,包括:
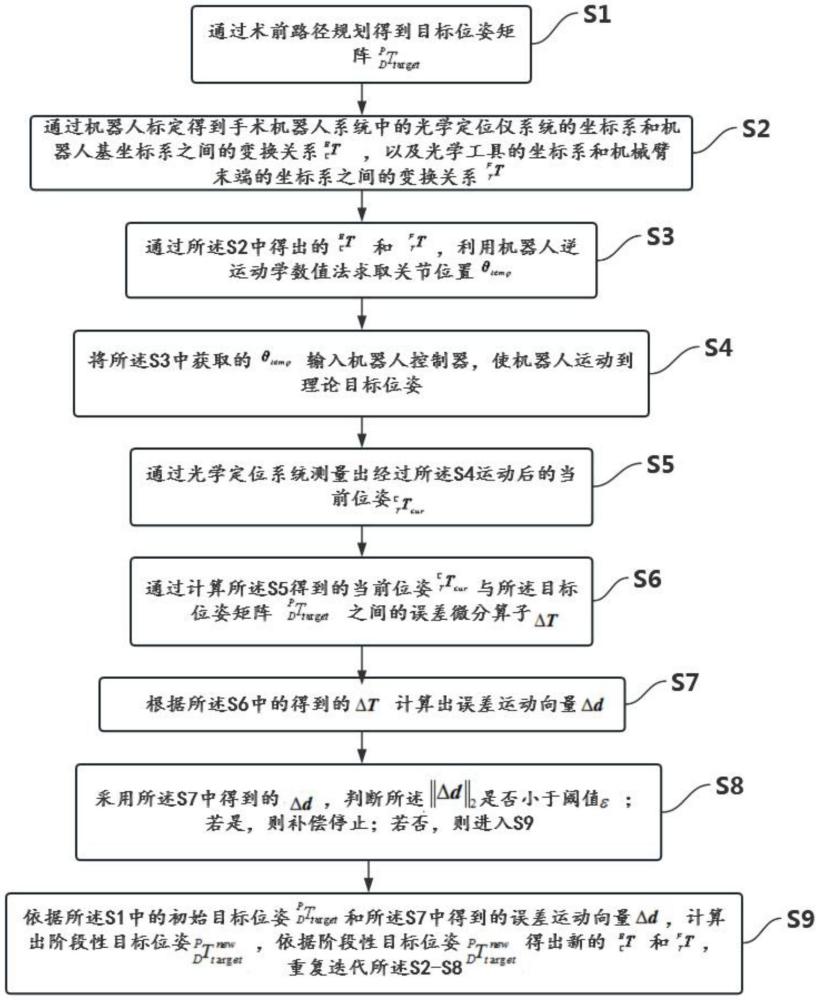
4、s1、通过术前路径规划得到目标位姿矩阵
5、s2、通过机器人标定得到手术机器人系统中的光学定位系统的坐标系和机器人基坐标系之间的变换关系以及光学工具的坐标系和机械臂末端的坐标系之间的变换关系
6、s3、通过所述s2中得出的和利用机器人逆运动学数值法求取关节位置θtemp;
7、s4、将所述s3中获取的θtemp输入机器人控制器,使机器人运动到理论目标位姿;
8、s5、通过光学定位系统测量出经过所述s4运动后的当前位姿
9、s6、通过计算所述s5得到的当前位姿与所述目标位姿矩阵之间的误差微分算子δt;
10、s7、根据所述s6中的得到的δt计算出误差运动向量δd;
11、s8、采用所述s7中得到的δd,判断所述||δd||2是否小于阈值ε;若是,则补偿停止;若否,则进入s9;
12、s9、依据所述s1中的初始目标位姿和所述s7中得到的误差运动向量δd,计算出阶段性目标位姿依据阶段性目标位姿得出新的和重复迭代所述s2-s8。
13、进一步的,所述s2中的手术机器人系统包括:
14、机械臂,用于实施手术;光学定位系统,用于确定手术过程中机械臂和骨头的位姿。
15、进一步的,所述光学定位系统包括:光学定位仪、光学工具t1、光学工具t2和光学工具t3,光学工具t1、光学工具t2和光学工具t3均带有红外线反射球,所述光学定位仪位于所述机械臂一侧,所述光学定位仪通过追踪红外线反射球获得被动光学工具中心点在光学定位系统坐标系下的位置;
16、所述光学工具t1设置于近端骨位置,用于确定近端骨的位姿;
17、所述光学工具t2设置于远端骨位置,用于确定远端骨的位姿;
18、所述光学工具t3设置于机械臂末端的法兰盘上,用于测量计算机器人末端位姿。
19、进一步的,所述θtemp的计算方法为:
20、通过计算出法兰盘与基坐标系的关系,通过对进行逆运动学计算得到θtemp。
21、进一步的,所述微分算子δt的计算公式为:
22、r代表旋转矩阵;t代表平移矩阵。
23、进一步的,所述s7中:
24、δd=[dx,dy,dz,δx,δy,δz]t。
25、进一步的,所述s8中阈值ε为2mm。
26、本发明通过基于骨折复位的路径规划的结果,在光学定位系统计算机器人复位目标位姿与机械臂关节角,使机械臂移动得到机器人复位实际位姿,并通过补偿方法迭代改变机器人关节角度,使机器人复位实际位姿逐渐逼近目标位姿。在后续迭代过程中,位姿误差波动较大,难以收敛到稳定值。相比之下,采用复位位姿误差在线补偿,没有出现位置误差增大的情况,且迭代过程中位姿误差波动较小,可使机器人复位位姿逐渐逼近目标位姿。
技术特征:
1.一种长骨骨折手术机器人复位位姿误差在线补偿方法,其特征在于,包括:
2.根据权利要求1所述的长骨骨折手术机器人复位位姿误差在线补偿方法,其特征在于,所述s2中的手术机器人系统包括:
3.根据权利要求2所述的长骨骨折手术机器人复位位姿误差在线补偿方法,其特征在于,所述光学定位系统包括:光学定位仪、光学工具t1、光学工具t2和光学工具t3,光学工具t1、光学工具t2和光学工具t3均带有红外线反射球,所述光学定位仪位于所述机械臂一侧,所述光学定位仪通过追踪红外线反射球获得被动光学工具中心点在光学定位系统坐标系下的位置;
4.根据权利要求2所述的长骨骨折手术机器人复位位姿误差在线补偿方法,其特征在于,所述θtemp的计算方法为:
5.根据权利要求1所述的长骨骨折手术机器人复位位姿误差在线补偿方法,其特征在于,所述微分算子δt的计算公式为:
6.根据利要求1所述的长骨骨折手术机器人复位位姿误差在线补偿方法,其特征在于,所述s7中:
7.根据权利要求1所述的长骨骨折手术机器人复位位姿误差在线补偿方法,其特征在于,所述s8中阈值ε为2mm。
技术总结
一种长骨骨折手术机器人复位位姿误差在线补偿方法,包括:通过术前路径规划得到目标位姿矩阵通过机器人标定得到和利用机器人逆运动学数值法求取关节位置θ<subgt;temp</subgt;;将所述S3中获取的θ<subgt;temp</subgt;输入机器人控制器,使机器人运动到理论目标位姿;通过光学定位系统测量出经过所述S4运动后的当前位姿通过计算所述得到的当前位姿与所述目标位姿矩阵之间的误差微分算子ΔT;根据得到的ΔT计算出误差运动向量Δd;采用所述Δd,判断所述||Δd||<subgt;2</subgt;是否小于阈值ε;若是,则补偿停止;若否,则进入下一步;依据所述初始目标位姿和所述误差运动向量Δd,计算出阶段性目标位姿依据阶段性目标位姿得出新的和重复迭代所述S2‑S8。
技术研发人员:卢耀安,廖有梦,王成勇
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!