垂直多关节机器人的制作方法
本发明涉及具有臂的垂直多关节机器人。
背景技术:
1、垂直多关节机器人为工业用机器人,用于通用的目的。垂直多关节机器人具备设置于地板等的基台和载置于基台的主体部。在主体部的内部收纳有使主体部相对于基台转动的马达(第1马达)、使臂相对于主体部转动的马达(第2马达)等。
2、垂直多关节机器人大多采用5轴、6轴的结构。于是,与靠近前端(末端执行器)的马达相比,靠近基台的马达进行动作的质量较大,因此必然要配置输出较大的马达。于是,收纳于主体部的第1马达、第2马达的输出变大,发热也变大,因此需要抑制马达的温度上升。
3、在专利文献1中记载有用于机器人的关节部的冷却装置。该冷却装置具备:冷却介质流路体,其形成有冷却介质流路;冷却介质循环流路,其连接于冷却介质流路体;散热器及送出器(泵);以及风扇。冷却介质流路体配设于机器人的关节部的成为发热部的马达(液冷)。散热器及送出器设于冷却介质循环流路的中途。风扇设于散热器,构成为对散热器进行冷却。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2022-056064号公报
技术实现思路
1、发明要解决的问题
2、专利文献1的冷却装置需要在机器人的关节部的马达配设冷却介质流路体,而存在构造变得复杂的问题。
3、作为其他结构,考虑安装冷却风扇而对马达进行冷却(空冷)的结构。但是,在机器人为全覆盖模型(机构部由罩覆盖的构造)的情况下,马达也由罩覆盖。若在该罩的外侧安装冷却风扇,或者以覆盖冷却风扇的方式增大罩,则存在在机器人进行了动作时的框架干扰半径变大的问题。
4、本发明鉴于这样的课题,其目的在于提供一种即使马达由罩覆盖,也能够不增大框架干扰半径而以简单的结构对马达进行冷却的垂直多关节机器人。
5、用于解决问题的方案
6、为了解决上述课题,本发明的垂直多关节机器人的代表性的结构为具有臂的垂直多关节机器人,其特征在于,该垂直多关节机器人具备:基台;主体部,其载置于基台;第1马达,其使主体部相对于基台转动;第2马达,其使臂相对于主体部转动;第1马达室,其形成于主体部的内部并收纳第1马达;第2马达室,其形成于主体部的内部并收纳第2马达;连通口,其形成于主体部的内部并将第1马达室与第2马达室连通;第1马达罩,其覆盖第1马达室的开口;第2马达罩,其覆盖第2马达室的开口;进气口,其形成于第1马达罩和第2马达罩中的一者的下表面;排气口,在进气口形成于第1马达罩的情况下,该排气口形成于第2马达罩,在进气口形成于第2马达罩的情况下,该排气口形成于第1马达罩;以及送气风扇,其配置于进气口或排气口的附近且是主体部的内部。
7、发明的效果
8、根据本发明,能够提供一种即使马达由罩覆盖,也能够不增大框架干扰半径而利用简单的结构对马达进行冷却的垂直多关节机器人。
技术特征:
1.一种垂直多关节机器人,其具有臂,其特征在于,
技术总结
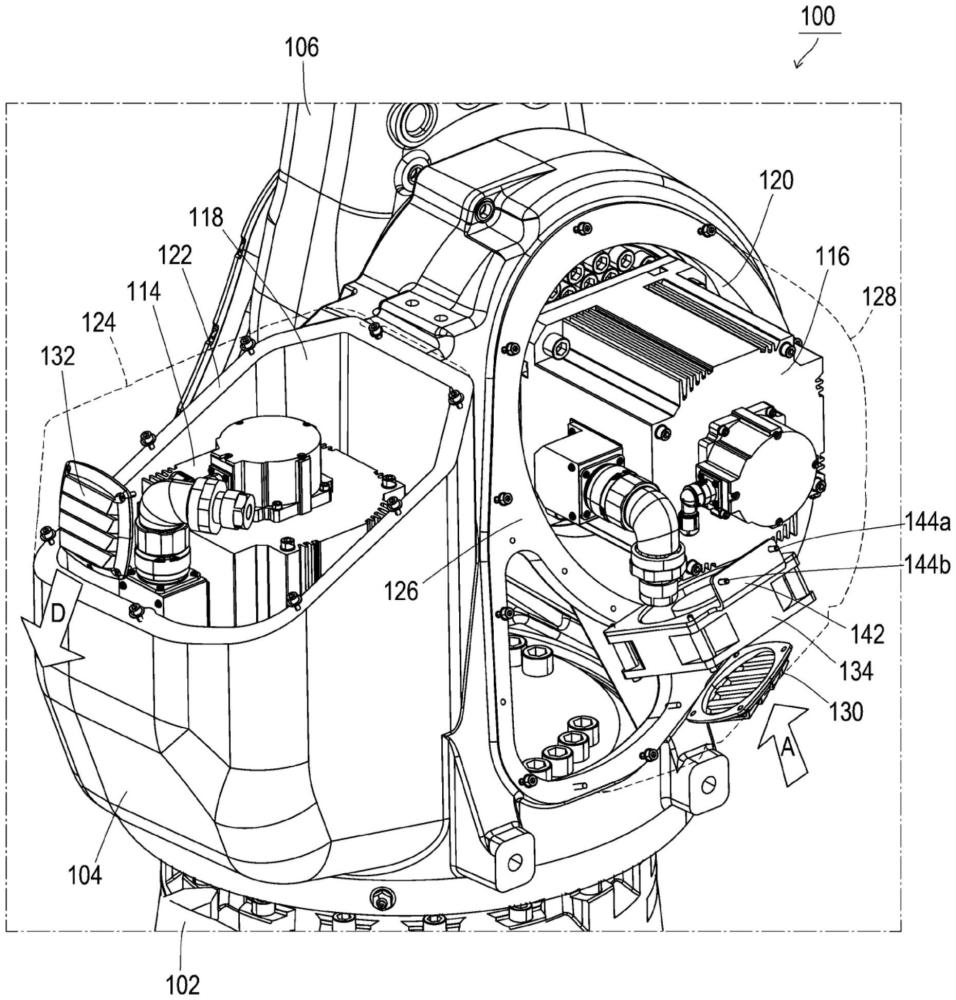
本发明提供即使马达由罩覆盖也能够不增大框架干扰半径而利用简单的结构对马达进行冷却的垂直多关节机器人。垂直多关节机器人(100)具备使主体部(104)相对于基台(102)转动的第1马达(114)、使下臂(106)相对于主体部转动的第2马达(116)、形成于主体部的内部并各自收纳第1马达、第2马达的第1马达室(118)和第2马达室(120)、形成于主体部的内部并将第1马达室与第2马达室连通的连通口(136)、分别覆盖第1马达室的开口(122)、第2马达室的开口(126)的第1马达罩(124)和第2马达罩(128)、形成于第2马达罩的下表面(138)的进气口(130)、形成于第1马达罩的排气口(132)和配置于进气口的附近且是主体部的内部的送气风扇(134)。
技术研发人员:山崎纯辉
受保护的技术使用者:株式会社不二越
技术研发日:
技术公布日:2025/4/17
- 还没有人留言评论。精彩留言会获得点赞!