基于变刚度虚拟墙和阻尼力场的双臂遥操作系统及方法
本发明属于机器人遥操作控制的,主要涉及了一种基于变刚度虚拟墙和阻尼力场的双臂遥操作系统及方法。
背景技术:
1、机器人遥操作技术是指操作者通过主端控制回路,经过通讯链路,向从端发出控制指令,从端控制回路接受指令控制机器人完成作业的机器人控制技术。遥操作机器人常用于复杂环境以及时延环境下的机器人控制,通过人在回路的控制模式,完成一些自主机器人难以完成的作业任务。
2、在遥操作从端使用的机械臂的选择上,双臂遥操作机器人相比于单臂遥操作机器人功能性更强、灵活性更高、负载能力也更强,能够完成一些复杂度更高的作业任务。由于从端双臂存在重叠的工作空间,在控制过程中,不当的操作可能导致机械臂双臂出现运动干涉,存在两臂相碰的安全隐患。
3、为了实现双臂遥操机器人的安全控制,传统的控制方法往往选择在从端机械臂设置静态或是动态的虚拟墙。在从端设置虚拟墙的控制模式,无法直观地将越过虚拟墙的信息反馈给操作者。主端在对从端虚拟墙相关信息缺失的情况下,操作者在虚拟墙的作用后,会对机械臂的位置和状态产生认知偏差。不仅如此,现有的虚拟墙均是固定刚度,灵活性不足,无法根据操作环境的变化和任务需求的变化动态调整。在简单任务中,固定刚度可能过高,限制了操作的灵活度,而在需要高精度定位的任务中,刚度可能过低,影响操作的稳定性。
4、同时,一般的遥操作力反馈过程中,主端系统只有在执行器末端与环境发生力交互后才会将力觉信息传递给操作者。操作者在机械臂接触到操作对象或是障碍物之前,只能通过视觉信息等手段推测与操作对象以及障碍物的远近关系。在操作的过程中,很难把握机械臂的运动幅度以及速度,容易发生误判或是误操作,存在一定的安全隐患。
技术实现思路
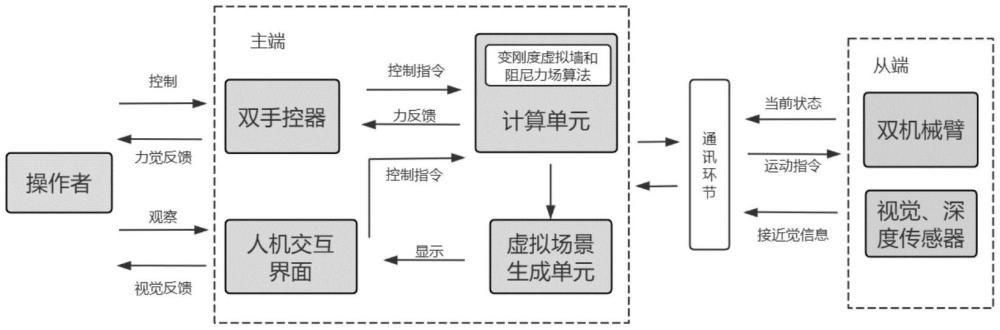
1、本发明正是针对现有双臂遥操作安全控制技术中,双臂遥操作机器人易操作不当引发碰撞的问题,提供一种基于变刚度虚拟墙和阻尼力场的双臂遥系统及方法,由主端和从端构成,主端包括双手控器、人机交互界面、虚拟场景生成单元和计算单元,从端包括双机械臂、视觉与深度传感器,其中计算单元用于接收主端双手控器的控制指令,经过主端虚拟墙和阻尼力场算法后,生成从端的双机械臂控制指令,将力反馈传递至主端的双手控器,将深度信息和视觉信息传递给虚拟场景生成模块。本系统及方法在主端通过手控器以力反馈的形式向操作者进行碰撞预警,设置动态安全系数实时更新虚拟墙的刚度,根据变刚度虚拟墙设置阻尼力场,也增加双臂遥操作过程中人机交互的体验,实现双臂之间、主端与从端、主端与操作者之间自然有效的交互,避免双臂遥操作过程碰撞、误操作发生的可能性。
2、为了实现上述目的,本发明采取的技术方案是:基于变刚度虚拟墙和阻尼力场的双臂遥操作系统,由主端和从端构成,所述主端包括双手控器、人机交互界面、虚拟场景生成单元和计算单元;所述从端包括双机械臂、视觉与深度传感器;其中,
3、所述双机械臂:用于实现遥操作场景任务;
4、所述视觉与深度传感器:用于获取作业环境信息和距离信息,提供接近觉信息给主端的计算单元,用于场景的三维重建;
5、所述双手控器:与从端的双机械臂相对应,用于提供双机械臂的控制指令并对操作者提供力反馈;
6、所述虚拟场景生成单元:用于将获取的作业环境信息,经过计算单元处理后生成虚拟现实场景,并将虚拟现实场景输出至人机交互界面;
7、所述人机交互界面:用于提供遥操作人机交互接口,将虚拟场景生成单元生成的虚拟现实场景反馈给操作者;
8、所述计算单元:用于接收主端双手控器的控制指令,经过主端虚拟墙和阻尼力场算法后,生成从端的双机械臂控制指令,将力反馈传递至主端的双手控器,将深度信息和视觉信息传递给虚拟场景生成模块。
9、作为本发明的一种改进,所述三维重建包括机械臂自身的三维重建和作业环境与障碍物的重建,所述机械臂自身的三维重建通过提前建立机械臂几何模型和当前关节角信息进行;所述作业环境与障碍物的三维重建基于视觉与深度传感器得到的点云深度信息和彩色图像进行。
10、为了实现上述目的,本发明还采取的技术方案是:基于变刚度虚拟墙和阻尼力场的双臂遥操作方法,至少包括如下步骤:
11、s1,场景重建:在主端,通过提前建立几何学模型,并接收当前机械臂各关节角度值,对当前双臂的位姿进行三维重建;
12、s2,变刚度动态虚拟墙设置:结合当前双臂姿态,实时生成两个变刚度虚拟墙,所述变刚度动态虚拟墙垂直于作业平面,分别对应两台机械臂;
13、s3,阻尼力场设置:根据步骤s2生成的虚拟墙和其刚度,设置对应阻尼力场,所述阻尼力场包含虚拟墙及周围区域;
14、s4,运动预测:主端手控器获取操作者指令,根据指令预测双臂将到达的新位姿;
15、s5,设置力反馈,指令处理:根据机械臂当前位置和步骤s3获得的阻尼力场,在手控器上施加对应力反馈,根据当前虚拟墙刚度,处理运动指令,实现安全控制。
16、作为本发明的一种改进,所述步骤s2中,虚拟墙的法向量方向根据一侧机械臂末端与另一侧机械臂的最近点所构成的方向向量确定,两个虚拟墙互相平行。
17、作为本发明的另一种改进,所述步骤s2中的虚拟墙由动态安全系数μ确定虚拟墙刚度,当安全系数μ=1时,虚拟墙完全不可穿透;当安全系数μ=0时,虚拟墙不存在;当安全系数μ介于0至1之间,虚拟墙处于变刚度状态。
18、作为本发明的另一种改进,所述安全系数μ与机械臂移动速度espeed、当前操作任务预设安全系数etask、环境因素eenvironment和机械臂当前位置与工作空间关系epos相关,具体为:
19、μ=ω1*espeed+ω2*etask+ω3*eenvironment+ω4*epos
20、其中,ω1、ω2、ω3、ω4是各因素的权重。
21、作为本发明的更进一步改进,所述步骤s3中,当动态安全系数μ从1到0变化时,虚拟墙处于变刚度状态,阻尼力场沿动态虚拟墙法向量的方向,在虚拟墙边界上存在0到最大阻尼力变化的过渡区域δd,所述最大阻尼力随安全系数μ的增大而增大,阻尼力场由过渡区域δd、虚拟墙厚度h、点到虚拟墙距离l生成。
22、与现有技术相比,本发明具有的有益效果:
23、(1)本方法安全性强,虚拟墙和阻尼力场均在主端作用,在指令发送从端前即可对潜在的碰撞风险进行预警处理,防患于未然。
24、(2)本方法灵活性高,虚拟墙动态实时更新,可以根据具体任务需求以及机械别状态等调整刚度,适用于多种操作环境。
25、(3)本方法操作者使用沉浸感强,操作者在控制双臂机器人完成作业任务过程中通过力反馈的方式可以了解双臂协作的工作状态。
技术特征:
1.基于变刚度虚拟墙和阻尼力场的双臂遥操作系统,其特征在于:由主端和从端构成,所述主端包括双手控器、人机交互界面、虚拟场景生成单元和计算单元;所述从端包括双机械臂、视觉与深度传感器;其中,
2.如权利要求1所述的基于变刚度虚拟墙和阻尼力场的双臂遥操作系统,其特征在于:所述三维重建包括机械臂自身的三维重建和作业环境与障碍物的重建,所述机械臂自身的三维重建通过提前建立机械臂几何模型和当前关节角信息进行;所述作业环境与障碍物的三维重建基于视觉与深度传感器得到的点云深度信息和彩色图像进行。
3.使用如权利要求1所述系统的基于变刚度虚拟墙和阻尼力场的双臂遥操作方法,其特征在于,至少包括如下步骤:
4.如权利要求3所述的基于变刚度虚拟墙和阻尼力场的双臂遥操作方法,其特征在于:所述步骤s2中,虚拟墙的法向量方向根据一侧机械臂末端与另一侧机械臂的最近点所构成的方向向量确定,两个虚拟墙互相平行。
5.如权利要求4所述的基于变刚度虚拟墙和阻尼力场的双臂遥操作方法,其特征在于:所述步骤s2中的虚拟墙由动态安全系数μ确定虚拟墙刚度,当安全系数μ=1时,虚拟墙完全不可穿透;当安全系数μ=0时,虚拟墙不存在;当安全系数μ介于0至1之间,虚拟墙处于变刚度状态。
6.如权利要求4所述的基于变刚度虚拟墙和阻尼力场的双臂遥操作方法,其特征在于:所述安全系数μ与机械臂移动速度espeed、当前操作任务预设安全系数etask、环境因素eenvironment和机械臂当前位置与工作空间关系epos相关,具体为:
7.如权利要求5或6所述的基于变刚度虚拟墙和阻尼力场的双臂遥操作方法,其特征在于:所述步骤s3中,当动态安全系数μ从1到0变化时,虚拟墙处于变刚度状态,阻尼力场沿动态虚拟墙法向量的方向,在虚拟墙边界上存在0到最大阻尼力变化的过渡区域δd,所述最大阻尼力随安全系数μ的增大而增大,阻尼力场由过渡区域δd、虚拟墙厚度h、点到虚拟墙距离l生成。
技术总结
本发明公开了一种基于变刚度虚拟墙和阻尼力场的双臂遥操作系统及方法,由主端和从端构成,主端包括双手控器、人机交互界面、虚拟场景生成单元和计算单元,从端包括双机械臂、视觉与深度传感器,其中计算单元用于接收主端双手控器的控制指令,经过主端虚拟墙和阻尼力场算法后,生成从端的双机械臂控制指令,将力反馈传递至主端的双手控器,将深度信息和视觉信息传递给虚拟场景生成模块。本系统及方法在主端通过手控器以力反馈的形式向操作者进行碰撞预警,设置动态安全系数实时更新虚拟墙的刚度,根据变刚度虚拟墙设置阻尼力场,也增加双臂遥操作过程中人机交互的体验,实现双臂之间、主端与从端、主端与操作者之间自然有效的交互,避免双臂遥操作过程碰撞、误操作发生的可能性。
技术研发人员:宋爱国,严一冰,何牧天,李会军
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!