复合吸附增强型力电流耦合柔性静电抓手及其控制方法
本发明涉及柔性抓手,具体而言,涉及一种复合吸附增强型力电流耦合柔性静电抓手及其控制方法。
背景技术:
1、柔性抓取技术是工业化进程中的一项关键技术,是对传统刚性抓取方法的补充与改进,使得抓手能够更好地处理形状各异、表面不规则以及易受损伤的物体。柔性抓取技术的应用范围涵盖了自动化生产线、仓储物流系统、智慧农业、以及医疗保健等诸多领域,在解放人类双手、改善人类生活方面发挥着重要作用。
2、目前采用柔性抓取技术的抓手包括多种类型,例如电动/气动驱动的柔性抓手、基于形状记忆聚合物/合金驱动的柔性抓手、基于介电弹性体驱动的柔性抓手、基于静电吸附的柔性抓手等。电动/气动驱动的柔性抓手虽然具有简单且多功能的设计、快速的抓取速度和有效的抓取性能,被广泛应用于自动化抓取作业,然而,由于其驱动方式依赖于较笨重的电机、气泵等,使得抓手的便携性大大降低,且具有较大的能耗。基于形状记忆聚合物/合金驱动的柔性抓手便携性有了较大的提高,但存在控制精度差、能耗较高的问题。基于介电弹性体驱动的抓手有较好的便携性且能耗较低,但需经过预拉伸才能提供较大的驱动应变,堆叠式介电弹性体抓手相比单层介电弹性体抓手驱动能力更强,但电击穿的概率也大大增加。
3、基于静电吸附的柔性抓手具有适应性强、结构和控制简单、低能耗以及无损吸附的优势,能够解决上述柔性抓手存在的问题,但其只能抓取相对固定体型的物体,存在抓取范围不足的问题。
技术实现思路
1、本发明解决的问题是:如何解决柔性静电吸附抓手抓取范围不足的问题。
2、为解决上述问题,本发明提供一种复合吸附增强型力电流耦合柔性静电抓手及其控制方法。
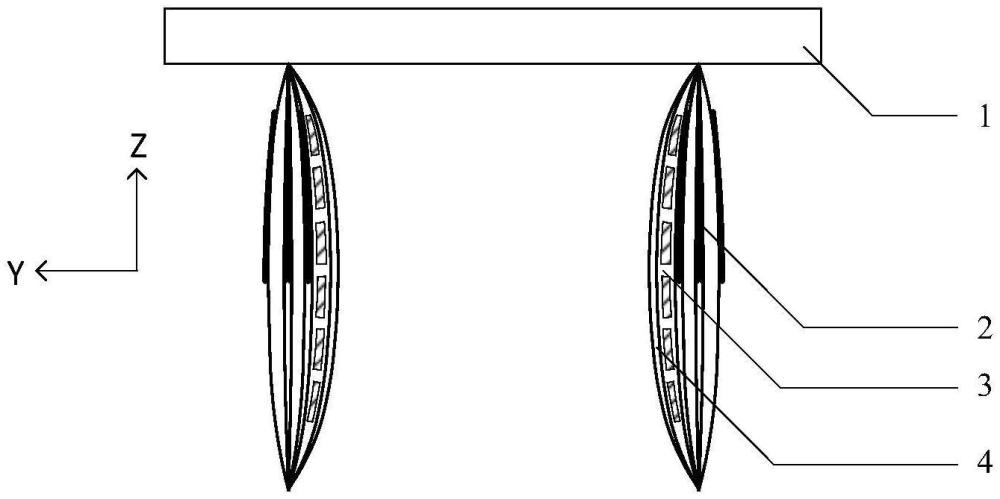
3、第一方面,本发明提供了一种复合吸附增强型力电流耦合柔性静电抓手,包括支撑架、力电流耦合结构、柔性静电吸附增强层和仿壁虎吸附增强层,所述力电流耦合结构沿长度方向的一端与所述支撑架连接,所述力电流耦合结构沿长度方向的另一端用于向厚度方向的两侧弯曲,所述柔性静电吸附增强层设于所述力电流耦合结构沿厚度方向的一侧,所述仿壁虎吸附增强层设于所述柔性静电吸附增强层的背离所述力电流耦合结构的一侧。
4、本发明的复合吸附增强型力电流耦合柔性静电抓手的有益效果是:通过设置力电流耦合结构,且力电流耦合结构沿长度方向的一端与支撑架连接,力电流耦合结构沿长度方向的另一端用于向厚度方向的两侧弯曲,使得在控制两个力电流耦合结构相背弯曲时能带动两个夹爪相背弯曲,在控制两个力电流耦合结构相向弯曲时能带动两个夹爪相向弯曲,即该抓手的两夹爪不仅可同步朝内弯曲,还可同步朝外弯曲,以适应更多不同尺寸或形状的待抓取物体,从而可提高静电抓手的抓取范围;同时,通过设置仿壁虎吸附增强层,且柔性静电吸附增强层设于力电流耦合结构沿厚度方向的一侧,而仿壁虎吸附增强层设于柔性静电吸附增强层的背离力电流耦合结构的一侧,该仿壁虎吸附增强层可提供范德华力,与柔性静电吸附增强层所提供的静电吸附力共同吸附待抓取物体,从而增强对待抓取物体的吸附作用,使得待抓取物体被抓取后不易掉落,进而提高静电抓手的抓取力。
5、可选地,所述柔性静电吸附增强层包括柔性绝缘层,所述柔性绝缘层沿所述力电流耦合结构长度方向延伸,所述柔性绝缘层内设有两个柔性电极,两个所述柔性电极分别连接高压电源的正负极。
6、可选地,所述柔性电极为矩形叉指电极、波纹形叉指电极、锯齿形叉指电极、环形叉指电极、圆形叉指电极;或者,所述柔性电极的图案为方形结构。
7、可选地,所述仿壁虎吸附增强层包括底层和仿壁虎纤毛微结构,所述底层覆设于所述柔性静电吸附增强层的背离所述力电流耦合结构的侧面,所述仿壁虎纤毛微结构形成于所述底层的背离所述柔性静电吸附增强层的侧面,所述仿壁虎纤毛微结构设置多个,且多个所述仿壁虎纤毛微结构在所述底层上沿所述力电流耦合结构的长度方向依次间隔排布。
8、可选地,所述仿壁虎纤毛微结构的垂直于所述底层的截面呈楔形或矩形;或者,所述仿壁虎纤毛微结构的垂直于所述底层的截面的外端具有倒角或圆角。
9、可选地,所述力电流耦合结构包括两个力电流耦合驱动器,每个所述力电流耦合驱动器包括柔性绝缘薄膜、柔性导电电极和介电液,两个所述柔性绝缘薄膜的周缘相连接,所述介电液包裹于两个所述柔性绝缘薄膜之间,两个所述柔性导电电极分别设置在两个所述柔性绝缘薄膜的外侧,两个所述柔性导电电极分别连接高压电源的正负极,两个所述柔性导电电极在通电时相互吸引以挤压所述介电液流动,从而带动所述力电流耦合结构弯曲变形。
10、可选地,所述柔性绝缘薄膜的材料为柔性绝缘材料,所述柔性导电电极的材料为柔性导电材料,所述介电液为与所述柔性绝缘薄膜不发生化学反应的液体。
11、可选地,所述力电流耦合结构、所述柔性静电吸附增强层和所述仿壁虎吸附增强层组成夹爪,所述夹爪设置两个,两个所述夹爪在所述支撑架上间隔设置,且两个所述夹爪的所述仿壁虎吸附增强层呈相对设置。
12、可选地,还包括电容检测器和控制模块,所述电容检测器用于检测所述柔性静电吸附增强层的电容变化,所述控制模块与所述电容检测器连接,用于根据所述电容检测器所检测的电容变化控制所述力电流耦合结构进行弯曲,以赋予抓手自感知功能。
13、第二方面,本发明提供了一种用于如上所述的复合吸附增强型力电流耦合柔性静电抓手的控制方法,包括以下步骤:
14、s1:复合吸附增强型力电流耦合柔性静电抓手靠近待抓取物体;
15、s2:两个力电流耦合结构相背弯曲;
16、s3:判断所述复合吸附增强型力电流耦合柔性静电抓手是否能包裹所述待抓取物体;
17、s4:若是,则进入s5,若否,则进入s6;
18、s5:两个所述力电流耦合结构相向弯曲;
19、s6:获取柔性静电吸附增强层的电容c,判断是否c≥c1;
20、s7:若是,则进入s8,若否,则返回s5;
21、s8:所述柔性静电吸附增强层吸附所述待抓取物体;
22、s9:所述复合吸附增强型力电流耦合柔性静电抓手移动至目标位置;
23、s10:所述柔性静电吸附增强层释放所述待抓取物体;
24、s11:判断是否继续抓取,若是,则进入s1,若否,则结束抓取。
25、第三方面,本发明提供了一种基于如上所述的复合吸附增强型力电流耦合柔性静电抓手的自感知方法,所述复合吸附增强型力电流耦合柔性静电抓手的自感知方法包括:根据柔性静电吸附增强层所靠近的物体的材质变化产生的不同电容值,识别所述物体。
技术特征:
1.一种复合吸附增强型力电流耦合柔性静电抓手,其特征在于,包括支撑架(1)、力电流耦合结构(2)、柔性静电吸附增强层(3)和仿壁虎吸附增强层(4),所述力电流耦合结构(2)沿长度方向的一端与所述支撑架(1)连接,所述力电流耦合结构(2)沿长度方向的另一端用于向厚度方向的两侧弯曲,所述柔性静电吸附增强层(3)设于所述力电流耦合结构(2)沿厚度方向的一侧,所述仿壁虎吸附增强层(4)设于所述柔性静电吸附增强层(3)的背离所述力电流耦合结构(2)的一侧。
2.根据权利要求1所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,所述柔性静电吸附增强层(3)包括柔性绝缘层(31),所述柔性绝缘层(31)沿所述力电流耦合结构(2)长度方向延伸,所述柔性绝缘层(31)内设有两个柔性电极(32),两个所述柔性电极(32)分别连接高压电源的正负极。
3.根据权利要求2所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,所述柔性电极(32)为矩形叉指电极、波纹形叉指电极、锯齿形叉指电极、环形叉指电极、圆形叉指电极;或者,所述柔性电极(32)的图案为方形结构。
4.根据权利要求1所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,所述仿壁虎吸附增强层(4)包括底层(41)和仿壁虎纤毛微结构(42),所述底层(41)覆设于所述柔性静电吸附增强层(3)的背离所述力电流耦合结构(2)的侧面,所述仿壁虎纤毛微结构(42)形成于所述底层(41)的背离所述柔性静电吸附增强层(3)的侧面,所述仿壁虎纤毛微结构(42)设置多个,且多个所述仿壁虎纤毛微结构(42)在所述底层(41)上沿所述力电流耦合结构(2)的长度方向依次间隔排布。
5.根据权利要求4所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,所述仿壁虎纤毛微结构(42)的垂直于所述底层(41)的截面呈楔形或矩形;或者,所述仿壁虎纤毛微结构(42)的垂直于所述底层(41)的截面的外端具有倒角或圆角。
6.根据权利要求1所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,所述力电流耦合结构(2)包括两个力电流耦合驱动器,每个所述力电流耦合驱动器包括柔性绝缘薄膜(21)、柔性导电电极(22)和介电液(23),两个所述柔性绝缘薄膜(21)的周缘相连接,所述介电液(23)包裹于两个所述柔性绝缘薄膜(21)之间,两个所述柔性导电电极(22)分别设置在两个所述柔性绝缘薄膜(21)的外侧,两个所述柔性导电电极(22)分别连接高压电源的正负极,两个所述柔性导电电极(22)在通电时相互吸引以挤压所述介电液(23)流动,从而带动所述力电流耦合结构(2)弯曲变形。
7.根据权利要求6所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,所述柔性绝缘薄膜(21)的材料为柔性绝缘材料,所述柔性导电电极(22)的材料为柔性导电材料,所述介电液(23)为与所述柔性绝缘薄膜(21)不发生化学反应的液体。
8.根据权利要求1所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,所述力电流耦合结构(2)、所述柔性静电吸附增强层(3)和所述仿壁虎吸附增强层(4)组成夹爪,所述夹爪设置两个,两个所述夹爪在所述支撑架(1)上间隔设置,且两个所述夹爪的所述仿壁虎吸附增强层(4)呈相对设置。
9.根据权利要求1所述的复合吸附增强型力电流耦合柔性静电抓手,其特征在于,还包括电容检测器和控制模块,所述电容检测器用于检测所述柔性静电吸附增强层(3)的电容变化,所述控制模块与所述电容检测器连接,用于根据所述电容检测器所检测的电容变化控制所述力电流耦合结构(2)进行弯曲,以赋予抓手自感知功能。
10.一种用于如权利要求1至9任一项所述的复合吸附增强型力电流耦合柔性静电抓手的控制方法,其特征在于,包括以下步骤:
11.一种基于如权利要求1至9任一项所述的复合吸附增强型力电流耦合柔性静电抓手的自感知方法,其特征在于,所述复合吸附增强型力电流耦合柔性静电抓手的自感知方法包括:根据柔性静电吸附增强层(3)所靠近的物体的材质变化产生的不同电容值,识别所述物体。
技术总结
本发明提供了一种复合吸附增强型力电流耦合柔性静电抓手及其控制方法,涉及柔性抓手技术领域,所述复合吸附增强型力电流耦合柔性静电抓手包括支撑架、力电流耦合结构、柔性静电吸附增强层和仿壁虎吸附增强层。本柔性静电抓手通过设置力电流耦合结构实现了双向弯曲从而可提高传统静电吸附柔性抓手的抓取范围,解决了现有静电吸附柔性抓手抓取范围不足的问题;同时通过设置仿壁虎吸附增强层可以提供范德华力以增强吸附,从而进一步提高了抓取力。
技术研发人员:刘立武,原颖泽,郭江龙,刘彦菊,冷劲松
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!