一种负压变刚度驱动器及驱动系统
本发明属于驱动器领域,尤其涉及一种负压变刚度驱动器及驱动系统。
背景技术:
1、随着技术和经济的发展,机器人在医疗、家庭、教育、服务、救援以及可穿戴设备等领域的需求不断增长,这对机器人结构的灵活性和柔顺性都提出了更高的要求。相应地,柔性机器人相对于传统机器人所拥有的变形连续,运动灵活和高柔顺性等特点逐渐引起了研究者们的关注。
2、作为柔性机器人的关键技术之一—驱动方法,其重要程度不言而喻。在众多驱动方法中(例如电、热、光和磁),气压驱动因其简单安全的操作特点、低成本和易于制造而受到广泛关注。气动驱动器是柔性机器人中常用的一种驱动器,具有较高的功重比、与生物肌肉相似的收缩特性和极佳的顺应性,这些特性确保了其可以实现收缩、拉伸、弯曲或旋转等多种运动模式。
3、为了迎合不同的场景需求,气动驱动器在原有的正压驱动器的基础上,逐渐发展出了负压驱动器。与正压驱动相比,负压驱动具有几个独特的固有优点。第一,它们没有爆炸或爆裂的危险,安全系数大幅提高;对于正压驱动器来讲,使用者受伤的潜在风险随着使用更高的压力而增加。第二,运行时体积相对更小,使它们能够有效地在密闭空间中使用。第三,增大了收缩比,降低了径向膨胀。第四,依托于负压驱动的特点,驱动器可以快速启动。为数不多的主要限制之一是负压驱动器的最大适用力和位移受最大真空压力的限制。
4、目前的气动驱动器缺少可以实现多向弯曲运动的设计。为此,有必要在负压驱动器的基础上,设计一种可变刚度的多向弯曲负压驱动器。
技术实现思路
1、本发明的目的在于提供一种负压变刚度驱动器及驱动系统,其可以在未变刚度状态下实现收缩运动;在变刚度状态下,主动改变刚度来实现可选的多向弯曲变形。
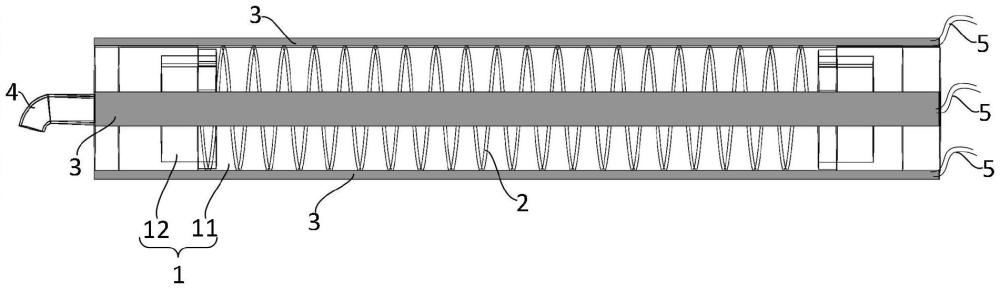
2、本发明是这样实现的,一种负压变刚度驱动器,包括负压源以及驱动器主体,所述驱动器主体包括密封软囊、弹性骨架以及变刚度层;所述负压源通过第一气管与所述密封软囊连通;所述弹性骨架嵌置于所述密封软囊内,用于支撑所述密封软囊;所述变刚度层固定在所述密封软囊的囊壁上,所述负压源通过第二气管与所述变刚度层连通;
3、当向所述变刚度层抽气,所述变刚度层内部形成负压时,所述变刚度层的刚度变大,所述驱动器主体上的刚度不对称,朝装有所述变刚度层的对侧方向弯曲;当向所述密封软囊抽气,所述密封软囊内部形成负压,且同时恢复所述变刚度层的内部气压为大气压时,所述驱动器主体做收缩运动。
4、进一步的,所述密封软囊包括薄膜筒以及密封堵头,两个所述密封堵头分别密封盖罩于所述薄膜筒的两端口,所述弹性骨架支撑所述薄膜筒的内壁。
5、进一步的,所述弹性骨架为弹簧,所述弹性骨架能够沿自身长度方向伸缩以及往外侧方向弯曲,所述弹性骨架的长度方向与所述薄膜筒的长度方向平行。
6、进一步的,所述变刚度层贴附在所述薄膜筒的外周缘上,所述驱动器主体包括有至少一个所述变刚度层,所有变刚度层沿所述薄膜筒的周向方向间隔分布。
7、进一步的,所述密封堵头采用3d打印技术制备而成,所述密封堵头经紫外线光固化处理以确保气密效果。
8、进一步的,所述变刚度层的变刚度机理为层干扰、颗粒干扰、纤维干扰或静电层干扰。
9、进一步的,所述变刚度层的变刚度结构为层干扰结构,没向所述变刚度层抽气时,所述变刚度层内部的层干扰结构能相对自由滑动,所述变刚度层具有较低的刚度;向所述变刚度层抽气,使其内部形成负压时,所述变刚度层内部的相邻的层干扰结构相互耦合,所述变刚度层的刚度变大。
10、进一步的,所述变刚度层的变刚度结构为静电吸附结构,通过正电极片与负电极片相对摆放并接入高压源实现;当未接通高压源时,正电极片与负电极片之间没有相互作用力,两者能相对自由滑动,所述变刚度层具有较低的刚度;当接通高压源时,正电极片与负电极片之间产生吸附力,两者不能相对滑动,所述变刚度层的刚度变大。
11、为实现上述发明目的,本发明还提供了一种负压变刚度驱动系统,包括信号采集卡、气动阀、电感测量模块、控制工作站以及上述的负压变刚度驱动器,所述第一气管和第二气管均与所述气动阀连接;所述信号采集卡输出模拟信号,控制所述气动阀调节气压的大小以及方向,从而分别控制所述密封软囊以及变刚度层内部的气压,以此实现不同的功能。
12、所述控制工作站与所述信号采集卡、气动阀、电感测量模块电连接;通过电感测量模块测量所述螺旋弹簧线圈的电感变化以反映变形情况,所测数据通过模拟信号输入回所述信号采集卡,并在所述控制工作站中整合分析。
13、本发明与现有技术相比,有益效果在于:
14、本发明提供的负压变刚度驱动器,在未变刚度状态下可以实现收缩运动;在变刚度状态下,可以通过提高变刚度层的刚度来实现可选的弯曲变形,适应性较传统的刚性驱动器大幅提高,并且具有较高的功重比、与生物肌肉相似的收缩特性和极佳的顺应性,尤其适合应用于柔性机器人,以实现多种类型物体的抓取。同时,负压变刚度驱动器采用弹簧作为内部骨架,可以通过电感的变化表征驱动器主体的运动以实现自感知功能。
技术特征:
1.一种负压变刚度驱动器,其特征在于,包括负压源以及驱动器主体,所述驱动器主体包括密封软囊、弹性骨架以及变刚度层;所述负压源通过第一气管与所述密封软囊连通;所述弹性骨架嵌置于所述密封软囊内,用于支撑所述密封软囊;所述变刚度层固定在所述密封软囊的囊壁上,所述负压源通过第二气管与所述变刚度层连通;
2.根据权利要求1所述的负压变刚度驱动器,其特征在于,所述密封软囊包括薄膜筒以及密封堵头,两个所述密封堵头分别密封盖罩于所述薄膜筒的两端口,所述弹性骨架支撑所述薄膜筒的内壁。
3.根据权利要求2所述的负压变刚度驱动器,其特征在于,所述弹性骨架为弹簧,所述弹性骨架能够沿自身长度方向伸缩以及往外侧方向弯曲,所述弹性骨架的长度方向与所述薄膜筒的长度方向平行。
4.根据权利要求2所述的负压变刚度驱动器,其特征在于,所述变刚度层贴附在所述薄膜筒的外周缘上,所述驱动器主体包括有至少一个所述变刚度层,所有变刚度层沿所述薄膜筒的周向方向间隔分布。
5.根据权利要求2所述的负压变刚度驱动器,其特征在于,所述密封堵头采用3d打印技术制备而成,所述密封堵头经紫外线光固化处理以确保气密效果。
6.根据权利要求1所述的负压变刚度驱动器,其特征在于,所述变刚度层的变刚度机理为层干扰、颗粒干扰、纤维干扰或静电层干扰。
7.根据权利要求1所述的负压变刚度驱动器,其特征在于,所述变刚度层的变刚度结构为层干扰结构,没向所述变刚度层抽气时,所述变刚度层内部的层干扰结构能相对自由滑动,所述变刚度层具有较低的刚度;向所述变刚度层抽气,使其内部形成负压时,所述变刚度层内部的相邻的层干扰结构相互耦合,所述变刚度层的刚度变大。
8.根据权利要求1所述的负压变刚度驱动器,其特征在于,所述变刚度层的变刚度结构为静电吸附结构,通过正电极片与负电极片相对摆放并接入高压源实现;当未接通高压源时,正电极片与负电极片之间没有相互作用力,两者能相对自由滑动,所述变刚度层具有较低的刚度;当接通高压源时,正电极片与负电极片之间产生吸附力,两者不能相对滑动,所述变刚度层的刚度变大。
9.一种负压变刚度驱动系统,其特征在于,包括信号采集卡、气动阀、电感测量模块、控制工作站以及如权利要求3所述的负压变刚度驱动器,所述第一气管和第二气管均与所述气动阀连接;所述信号采集卡输出模拟信号,控制所述气动阀调节气压的大小以及方向,从而分别控制所述密封软囊以及变刚度层内部的气压,以此实现不同的功能;
技术总结
本发明公开了一种负压变刚度驱动器及驱动系统,该负压变刚度驱动器包括负压源和驱动器主体,驱动器主体包括密封软囊、弹性骨架和变刚度层。弹性骨架嵌置于密封软囊内,变刚度层固定在密封软囊的囊壁上。该负压变刚度驱动系统包括信号采集卡、气动阀和负压变刚度驱动器。当向变刚度层抽气,变刚度层内部形成负压时,变刚度层的刚度变大,驱动器主体刚度不对称,朝对侧方向弯曲;当向密封软囊抽气,同时恢复变刚度层的内部气压为大气压时,驱动器主体做收缩运动。本发明的驱动器具有较高的功重比、与生物肌肉相似的收缩特性和顺应性,能实现多向弯曲的功能,可抓取多种类型物体。同时,可以通过弹簧电感的变化表征驱动器的运动以实现自感知功能。
技术研发人员:郭江龙,裴昱翔,邓喆,刘彦菊,冷劲松
受保护的技术使用者:哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院)
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!