一种用于气动机械手的多回路气压调控与监测系统
本发明涉及控制系统领域,更具体的说是一种用于气动机械手的多回路气压调控与监测系统。
背景技术:
1、近年来,随着机器人技术的快速发展,机械手广泛应用于机械制造、冶金、电子、轻工和原子能等部门。作为机械手主要驱动方式之一的气动机械手,相比电动机械手,响应速度和精度通常较低,因此如何提高气动机械手的控制精度,以执行精细操作是气动机械手面临的关键技术挑战。
技术实现思路
1、本发明提供一种用于气动机械手的多回路气压调控与监测系统,目的是可以实现对机械手各气动路径内压力的控制。
2、上述目的通过以下技术方案来实现:
3、一种用于气动机械手的多回路气压调控与监测系统,包括:上位机和下位机,下位机用于检测气动机械手每一气动回路内气压,上位机的压力指令发送给下位机,下位机实现对各气动路径内压力的控制。
4、还包括充气路电磁阀和抽气路电磁阀,下位机包括pcb板,以及连接在pcb板上的单片机、气压传感器、光电耦合模块、电源模块和串口模块,充气路电磁阀与一个光电耦合模块电连接,抽气路电磁阀与另一个光电耦合模块电连接,气压传感器、充气路电磁阀和抽气路电磁阀分别通过软管连通在四通转换端子中的三个通路上,四通转换端子剩下的一个通路作为输出端,串口模块与上位机连接。
5、气压传感器连接在四通转换端子上可监测每一气动回路内气压并反馈给单片机。
6、还包括充气泵,充气泵上连通有正压稳压阀,正压稳压阀通过软管连通的充气路电磁阀;真空泵,真空泵上连通有负压稳压阀,负压稳压阀通过软管连通抽气路电磁阀,在充气泵或真空泵上能够并联的连接多组正压稳压阀-充气路电磁阀或负压稳压阀-抽气路电磁阀。
7、气体传感器会实时监测气动回路内气压值,反馈给单片机,单片机通过反馈控制使气路内气压值精确且稳定,并将气压传感器监测到的气压值通过串口传指上位机。
8、本发明一种用于气动机械手的多回路气压调控与监测系统的有益效果为:
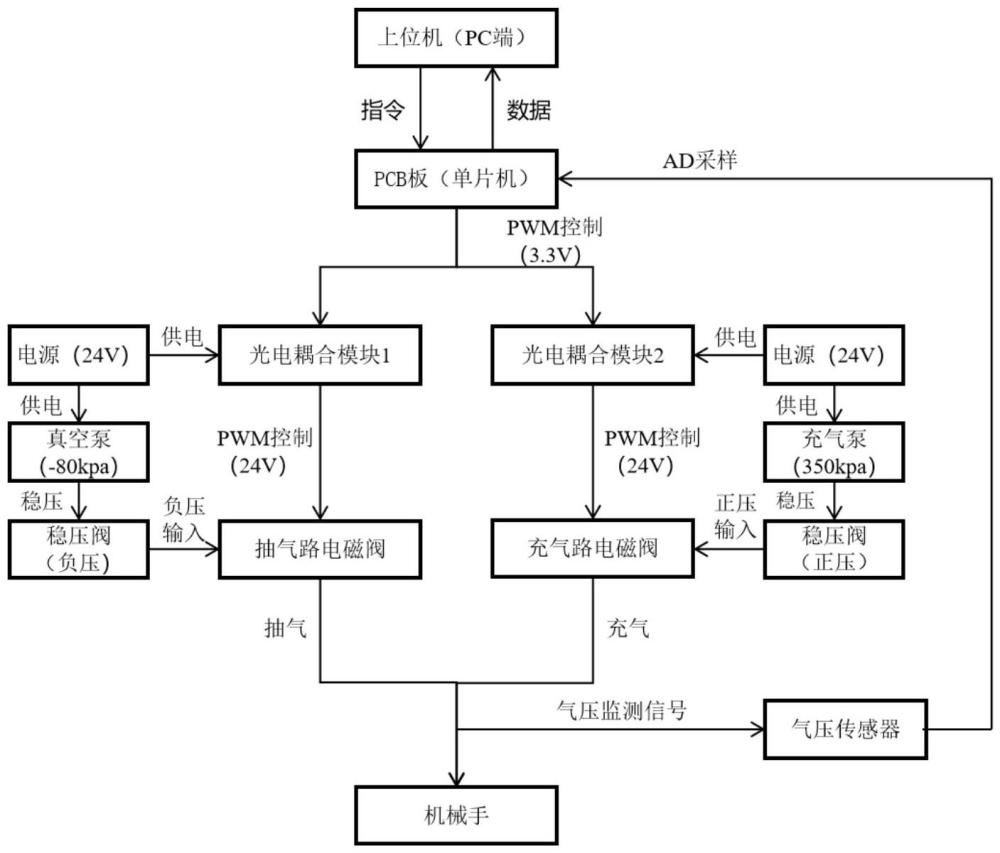
9、使用上位机向单片机发送控制指令,单片机将处理后的信号发送给光电耦合模块,光电耦合模块单片机发来的3.3v变为24v的信号来控制电磁阀,气压传感器采集到的电压信息通过ad采样变为气压信息发送给单片机,单片机再将处理后的数据传输给上位机,从而使使用者可在上位机上进行气压调控与气压监测。气泵通过开关连接电源控制气泵开闭,气泵通过稳压阀连接在电磁阀上,电磁阀各接口连接在机械手的各气动回路上,各气动回路内精度优于±2kpa。
技术特征:
1.一种用于气动机械手的多回路气压调控与监测系统,其特征是,包括:上位机(11)和下位机,下位机用于检测气动机械手每一气动回路内气压,上位机(11)的压力指令发送给下位机,下位机实现对各气动路径内压力的控制。
2.根据权利要求1所述的用于气动机械手的多回路气压调控与监测系统,其特征是,上位机11包括串口通信界面、用于实现气压监测和调控的气压监测与快捷调控界面和用于显示和调节机械手运动轨迹的监控与微调界面。
3.根据权利要求2所述的用于气动机械手的多回路气压调控与监测系统,其特征是,还包括充气路电磁阀(8)和抽气路电磁阀(9),下位机包括pcb板(5),以及连接在pcb板(5)上的单片机(501)、气压传感器(502)、光电耦合模块(503)、电源模块(504)和串口模块(505),充气路电磁阀(8)与一个光电耦合模块(503)电连接,抽气路电磁阀(9)与另一个光电耦合模块(503)电连接,气压传感器(502)、充气路电磁阀(8)和抽气路电磁阀(9)分别通过软管连通在四通转换端子(10)中的三个通路上,四通转换端子(10)剩下的一个通路作为输出端,串口模块(505)与上位机(11)连接。
4.根据权利要求3所述的用于气动机械手的多回路气压调控与监测系统,其特征是,单片机(501)的型号为stm32f407zgt6。
5.根据权利要求3所述的用于气动机械手的多回路气压调控与监测系统,其特征是,气压传感器(502)为xgzp6847a气体压力传感器,连接在四通转换端子(10)上可监测每一气动回路内气压并反馈给单片机(501)。
6.根据权利要求3所述的用于气动机械手的多回路气压调控与监测系统,其特征是,充气路电磁阀(8)和抽气路电磁阀(9)采用微型高频三通电磁阀。
7.根据权利要求3所述的用于气动机械手的多回路气压调控与监测系统,其特征是,还包括充气泵(3),充气泵(3)上连通有正压稳压阀(6),正压稳压阀(6)通过软管连通的充气路电磁阀(8);真空泵(4),真空泵(4)上连通有负压稳压阀(7),负压稳压阀(7)通过软管连通抽气路电磁阀(9),在充气泵(3)或真空泵(4)上能够并联的连接多组正压稳压阀(6)-充气路电磁阀(8)或负压稳压阀(7)-抽气路电磁阀(9)。
8.根据权利要求3所述的用于气动机械手的多回路气压调控与监测系统,其特征是,光电耦合模块(503)将3.3v信号转变为24v信号控制充气路电磁阀(8)、抽气路电磁阀(9)的开闭时间,以实现对输出压力的控制。
9.根据权利要求3所述的用于气动机械手的多回路气压调控与监测系统,其特征是,气体传感器(502)会实时监测气动回路内气压值,反馈给单片机(501),单片机(501)通过反馈控制使气路内气压值精确且稳定,并将气压传感器(502)监测到的气压值通过串口传指上位机。
10.根据权利要求3所述的用于气动机械手的多回路气压调控与监测系统,其特征是,每个气动路径分别接有一路正压输入、一路负压输入及一路气压监测,各个气动路径各自独立控制。
技术总结
本发明涉及控制系统领域,更具体的说是一种用于气动机械手的多回路气压调控与监测系统。使用上位机向单片机发送控制指令,单片机将处理后的信号发送给光电耦合模块,光电耦合模块单片机发来的3.3V变为24V的信号来控制电磁阀,气压传感器采集到的电压信息通过AD采样变为气压信息发送给单片机,单片机再将处理后的数据传输给上位机,从而使使用者可在上位机上进行气压调控与气压监测。气泵通过开关连接电源控制气泵开闭,气泵通过稳压阀连接在电磁阀上,电磁阀各接口连接在机械手的各气动回路上,各气动回路内精度优于±2kPa。
技术研发人员:周德开,权家乐,牟标,李朋春,张子仪,陈韩烁阳
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!