一种用于磁控机器人的高刚度大角度范围运动的装置
本发明涉及机械臂,具体涉及一种用于磁控机器人的高刚度大角度范围运动的装置。
背景技术:
1、重载、多自由度磁控机器人的设计难点在于要求机器人能够在多个维度上同时运动,具有足够的强度和刚性以承受高强度磁场装置的负载,并保证重载情况下的运动精度。
2、传统的并联机器人,其角度范围仅为约±20°,难以实现大范围内的磁控调整;而协作机械臂,需要在的大的活动范围内,才可以实现末端角度的调整,在手术室环境下,容易和周围仪器设备发生干涉;并且协作机器人手臂的刚度差;在大载荷情况下,机械臂的末端的稳定性、精度低;为此,本公开研发出了一种兼具强度、空间紧凑、高刚度/重载荷、在小空间内可实现大角度范围姿态调整的运动机构,为磁控血管介入提供设备基础。
技术实现思路
1、本发明要解决的技术问题是提供一种用于磁控机器人的高刚度大角度范围运动的装置,整体采用模块化并联机构,实现了磁控机器人的高刚度大角度范围运动。
2、为解决上述问题,本发明采用如下技术方案:
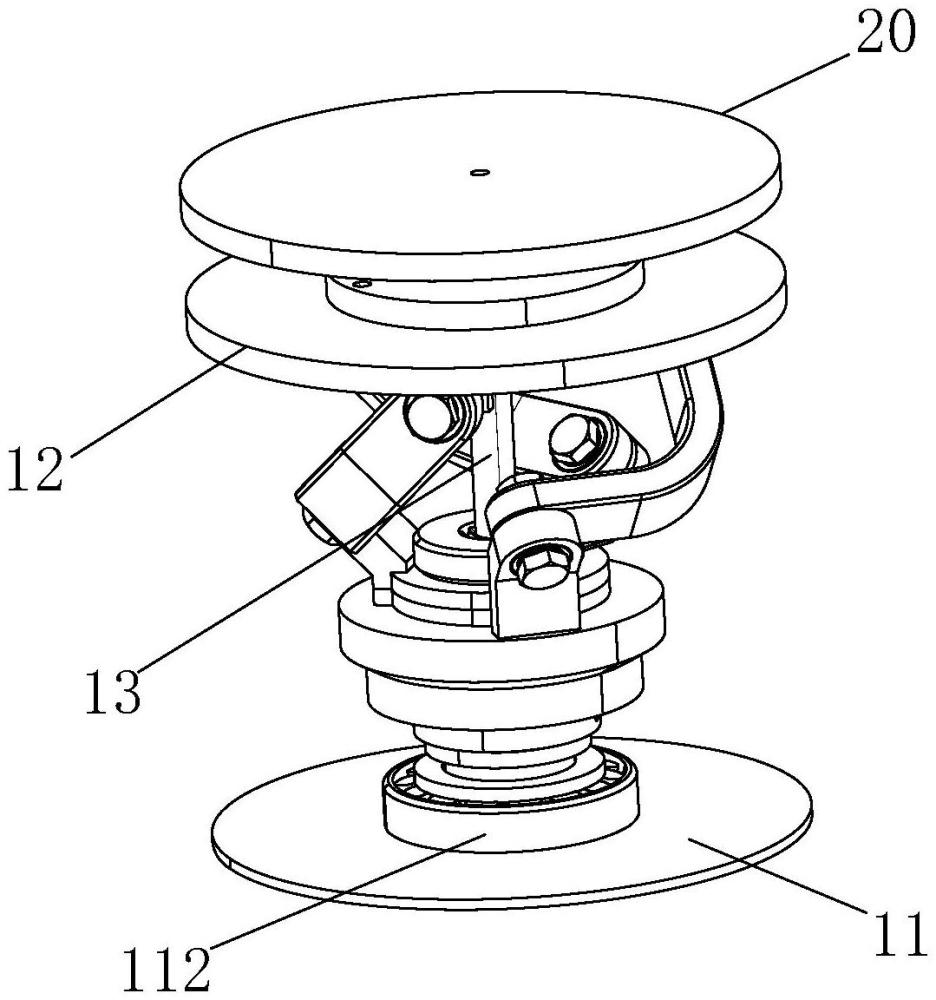
3、一种用于磁控机器人的高刚度大角度范围运动的装置,包括:至少一个并联运动机构。
4、所述至少一个并联运动机构具有静平台、动平台、轴向支撑杆、二段式主铰链和多个二段式副铰链。
5、所述静平台上可转动地设置有套筒件,所述轴向支撑杆两端分别与动平台和套筒件活动连接。
6、所述二段式主铰链首端与所述套筒件固定连接,所述二段式主铰链末端与所述动平台转动连接。
7、多个所述二段式副铰链首端均以所述套筒件的中轴线为旋转轴线,可旋转地设置在所述套筒件外周,且多个所述二段式副铰链末端均与所述动平台转动连接。
8、所述二段式主铰链和多个二段式副铰链均位于所述静平台之间动平台,且所述二段式主铰链和多个二段式副铰链的复合运动构成所述动平台的输出运动。
9、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,还包括:负载连接座和第一探测装置。
10、所述负载连接座用于装配负载。
11、所述第一探测装置配置在所述负载连接座和至少一个并联运动机构之间,所述第一探测装置用于检测负载的质量。
12、所述动平台和负载连接座均与所述第一探测装置固定连接。
13、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述动平台背面具有连接环。
14、所述二段式主铰链上设置有第一转轴,所述第一转轴与所述连接环转动连接。
15、所述二段式副铰链上设置有第二转轴,所述第二转轴与所述连接环转动连接。
16、所述连接环上设置有第二探测装置,用于获取所述第一转轴和/或第二转轴的旋转角度数据。
17、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述二段式主铰链和二段式副铰链均包括:套环和铰杆组。
18、所述铰杆组首端配置为与所述套环固定连接。
19、所述套环与所述套筒件构成同心套筒结构。
20、所述第一转轴可转动地配置在所述二段式主铰链的铰杆组末端,所述第二转轴可转动地配置在所述二段式副铰链的铰杆组末端。
21、所述第二探测装置配置为与所述连接环固定连接。
22、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述二段式主铰链和二段式副铰链均还包括:驱动机构。
23、所述驱动机构用于驱动所述套环转动。
24、所述驱动机构配置为与所述静平台固定连接。
25、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述并联运动机构还具有轴向支撑杆。
26、所述轴向支撑杆两端分别固定地设置有第一万向节和第二万向节。
27、所述轴向支撑杆通过所述第一万向节与所述动平台活动连接。
28、所述轴向支撑杆通过所述第二万向节与所述套筒件或二段式主铰链的套环活动连接。
29、在所述轴向支撑杆与所述静平台垂直时,所述轴向支撑杆和套筒件的中轴线重合。
30、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述铰杆组包括:第一曲杆和第二曲杆。
31、所述第二曲杆配置为与所述第一曲杆转动连接。
32、所述第一曲杆与所述套环一体式设置,所述第二曲杆上设置有装配孔,所述装配孔内固定地配置有转动轴承。
33、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述第一探测装置位压力传感器,所述第二探测装置为编码器。
34、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述动平台上设置有插槽,所述第一万向节插入所述插槽内。
35、所述第二万向节插入所述套筒件内。
36、本公开至少一实施例提供的用于磁控机器人的高刚度大角度范围运动的装置中,所述驱动机构包含有伺服电机、蜗杆和传动齿轮。
37、所述伺服电机的输出轴与所述蜗杆联轴设置,所述传动齿轮套设在所述套环外,所述蜗杆与所述传动齿轮啮合。
38、所述传动齿轮的中轴线与所述套环的中轴线重合。
39、本发明的有益效果为:采用了模块化的设计,多个并联运动机构可以叠加使用,从而满足磁控机器人的高刚度大角度范围运动。
技术特征:
1.一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,包括:
2.根据权利要求1所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,还包括:
3.根据权利要求2所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述动平台背面具有连接环;
4.根据权利要求3所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述二段式主铰链和二段式副铰链均包括:
5.根据权利要求4所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述二段式主铰链和二段式副铰链均还包括:
6.根据权利要求4所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述并联运动机构还具有轴向支撑杆;
7.根据权利要求4所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述铰杆组包括:
8.根据权利要求3所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述第一探测装置位压力传感器,所述第二探测装置为编码器。
9.根据权利要求6所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述动平台上设置有插槽,所述第一万向节插入所述插槽内。
10.根据权利要求5所述的一种用于磁控机器人的高刚度大角度范围运动的装置,其特征在于,所述驱动机构包含有伺服电机、蜗杆和传动齿轮;
技术总结
本发明涉及机械臂技术领域,具体公开一种用于磁控机器人的高刚度大角度范围运动的装置,包括并联运动机构;并联运动机构具有静平台、动平台、轴向支撑杆、二段式主铰链和多个二段式副铰链;静平台上可转动地设置有套筒件,轴向支撑杆的两端分别与动平台和套筒件活动连接;二段式主铰链首端与套筒件固定,二段式主铰链末端与动平台转动连接;二段式副铰链可旋转地设置在所述套筒件外周,且二段式副铰链末端均与动平台转动连接;二段式主铰链和二段式副铰链的复合运动构成动平台的输出运动;该用于磁控机器人的高刚度大角度范围运动的装置采用了模块化的并联机构,可以实现机械臂的高刚度大角度范围运动,保证机械臂的末端的稳定性和高精度。
技术研发人员:孟得山,郭韬文,李新亮
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!