一种触觉传感器及具有其的仿生机械手指的制作方法
本发明涉及机器人,特别涉及一种触觉传感器及具有其的仿生机械手指。
背景技术:
1、近年来,机器人技术不论在工业还是在民用领域的应用都有飞速的发展。机械手是机器人工作的最终执行机构,其性能直接决定了机器人的工作能力。与人类相似,具有高度通用性与灵巧性的机械手的开发十分必要。而对于机械手的抓握操作系统,触觉传感器是产生有效反馈以在移动期间保持稳定抓握的必要部件。
2、现有的触觉传感器检测的灵敏度和分辨率较差,且结构复杂,体积较大。
技术实现思路
1、有鉴于此,本发明提出了一种触觉传感器及具有其的仿生机械手指,具体方案如下:
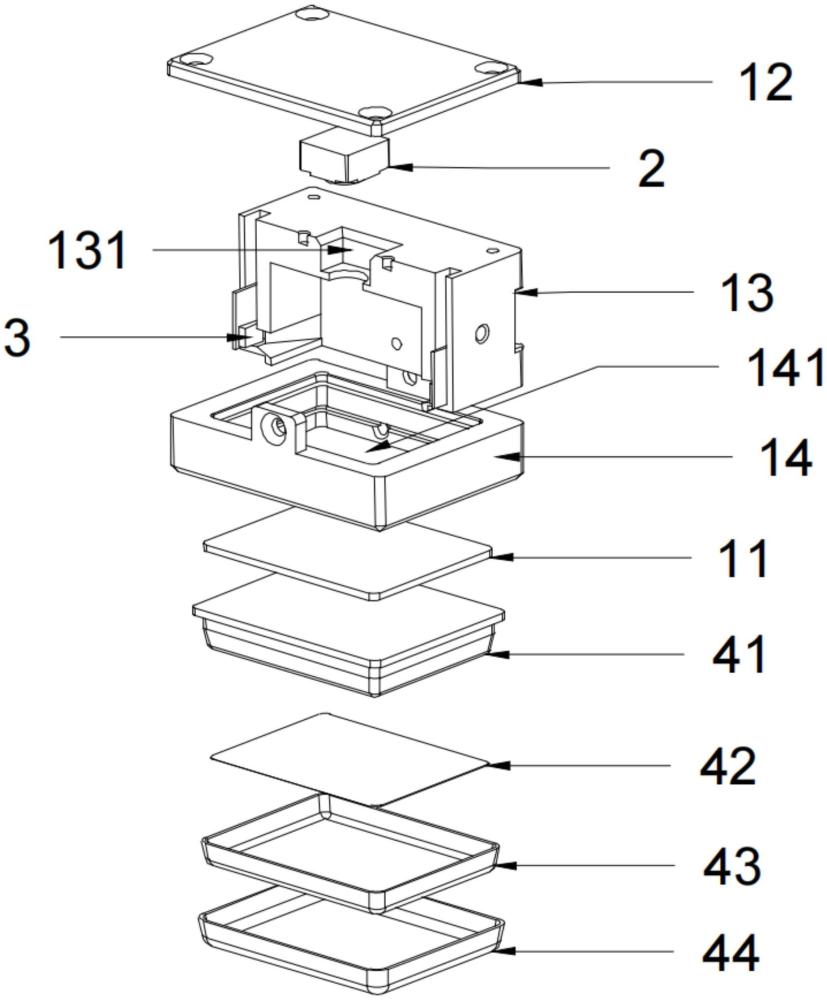
2、第一部分,本发明提出了一种触觉传感器,包括:壳体、拍摄组件、照明组件和触摸层,所述壳体上设置有透明部,所述触摸层与所述透明部远离所述壳体的一侧连接;所述拍摄组件设置于所述壳体内,且所述拍摄组件的拍摄端朝向所述透明部;所述壳体内形成有照明空间,所述照明组件设置于所述壳体内,所述照明组件用于为所述照明空间及所述触摸层照明;
3、所述触摸层沿自所述拍摄组件到所述透明部的方向依次包括透明的弹性层、图案层、背景层和耐磨层;所述图案层上包括一个或多个特定图案,所述背景层和所述耐磨层用于遮光;所述触摸层用于当所述耐磨层接触到物体时,使得所述图案层上的一个或多个所述特定图案变形,从而使得所述拍摄组件通过所述弹性层捕捉所述图案层上特定图案的变化,并根据所述变化得到触摸信息。
4、在一个具体实施例中,所述壳体包括上盖、主体和下盖,所述主体一侧与所述上盖连接,所述主体另一侧与所述下盖连接;所述透明部与所述下盖远离所述主体的一侧连接;所述拍摄组件与所述照明组件设置于所述主体上;所述下盖上开设有开口,以使所述拍摄组件的拍摄端通过所述开口贯穿所述透明部以拍摄所述触摸层,并使所述照明组件通过所述开口贯穿所述透明部以照明所述触摸层。
5、在一个具体实施例中,所述主体上设置有与所述拍摄组件相匹配的凹槽,所述拍摄组件通过所述凹槽与所述主体连接,且
6、所述拍摄组件设置于所述主体与所述上盖连接的侧面的中心点。
7、在一个具体实施例中,所述照明组件包括一个或多个照明灯,一个或多个所述照明灯均设置于所述主体沿从所述上盖到所述下盖方向的侧面上,且
8、一个或多个所述照明灯设置于所述主体靠近所述下盖的区域;沿从所述上盖到所述下盖方向,所述区域的长度与所述主体的长度两者的比值小于或等于三分之一。
9、在一个具体实施例中,所述特定图案包括点阵图案、色块图案、热力图案中的一种或多种。
10、在一个具体实施例中,所述透明部在所述触摸层上的投影大于或等于所述特定图案在所述图案层上形成的面积。
11、在一个具体实施例中,以所述壳体的中心到所述透明部的中心的连线为轴,所述拍摄组件的摆动角度范围包括50°-150°;
12、所述拍摄组件的拍摄端与所述触摸层之间的距离范围包括5mm-30mm。
13、在一个具体实施例中,所述触摸层的长度范围包括25mm-40mm;所述触摸层的宽度范围包括10mm-30mm。
14、在一个具体实施例中,所述弹性层包括硅胶层,所述弹性层的厚度范围包括2mm-6mm;
15、所述背景层的厚度范围包括0.1mm-1.5mm,所述耐磨层的厚度范围包括0.1mm-1.5mm。
16、第二部分,本发明提供了一种仿生机械手指,包括上述技术方案所提及的触觉传感器。
17、有益效果:
18、本发明提供了一种触觉传感器及具有其的仿生机械手指,通过拍摄组件捕捉触摸层接触到物体时其上的特定图案的形变,并通过先进的图像处理算法分析这些变化,从而生成详细的触摸信息,从而为用户提供交互反馈,确保了高灵敏度和准确性的触摸检测能力,结构简单,降低加工难度和安装复杂度。
技术特征:
1.一种触觉传感器,其特征在于,包括:壳体、拍摄组件、照明组件和触摸层,所述壳体上设置有透明部,所述触摸层与所述透明部远离所述壳体的一侧连接;
2.根据权利要求1所述的触觉传感器,其特征在于,所述壳体包括上盖、主体和下盖,所述主体一侧与所述上盖连接,所述主体另一侧与所述下盖连接;所述透明部与所述下盖远离所述主体的一侧连接;所述拍摄组件与所述照明组件设置于所述主体上;所述下盖上开设有开口,以使所述拍摄组件的拍摄端通过所述开口贯穿所述透明部以拍摄所述触摸层,并使所述照明组件通过所述开口贯穿所述透明部以照明所述触摸层。
3.根据权利要求2所述的触觉传感器,其特征在于,所述主体上设置有与所述拍摄组件相匹配的凹槽,所述拍摄组件通过所述凹槽与所述主体连接,且
4.根据权利要求2所述的触觉传感器,其特征在于,所述照明组件包括一个或多个照明灯,一个或多个所述照明灯均设置于所述主体沿从所述上盖到所述下盖方向的侧面上,且
5.根据权利要求1所述的触觉传感器,其特征在于,所述特定图案包括点阵图案、色块图案、热力图案中的一种或多种。
6.根据权利要求1所述的触觉传感器,其特征在于,所述透明部在所述触摸层上的投影大于或等于所述特定图案在所述图案层上形成的面积。
7.根据权利要求1所述的触觉传感器,其特征在于,以所述壳体的中心到所述透明部的中心的连线为轴,所述拍摄组件的摆动角度范围包括50°-150°;
8.根据权利要求1所述的触觉传感器,其特征在于,所述触摸层的长度范围包括25mm-40mm;所述触摸层的宽度范围包括10mm-30mm。
9.根据权利要求1所述的触觉传感器,其特征在于,所述弹性层包括硅胶层,所述弹性层的厚度范围包括2mm-6mm;
10.一种仿生机械手指,其特征在于,包括权利要求1-9任一项所述的触觉传感器。
技术总结
本发明提供了一种触觉传感器及具有其的仿生机械手指,包括:壳体、拍摄组件、照明组件和触摸层,壳体上设置有透明部,触摸层与透明部连接;拍摄组件设置于壳体内且拍摄端朝向透明部;壳体内形成有照明空间,照明组件为照明空间及触摸层照明;触摸层沿自拍摄组件到透明部的方向依次包括透明的弹性层、图案层、背景层和耐磨层;当耐磨层接触到物体时,图案层上的特定图案变形,使得拍摄组件捕捉特定图案的变化,并得到触摸信息。本发明通过拍摄组件捕捉触摸层接触到物体时其上的特定图案的形变,并通过先进的图像处理算法分析这些变化,从而生成详细的触摸信息,从而为用户提供交互反馈,确保了高灵敏度和准确性的触摸检测能力。
技术研发人员:陈杰,陈洹枝
受保护的技术使用者:戴盟(深圳)机器人科技有限公司
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!