一种工业机器人用多关节机械手的制作方法
本发明涉及机械手结构,特别是涉及一种工业机器人用多关节机械手。
背景技术:
1、在玻璃加工行业中,玻璃板的拿取、运输及放置是生产过程中不可或缺的重要环节,例如,将货架上放置的玻璃依次移动到蚀刻机上进行刻蚀,完成刻蚀后再放置回到货架的指定位置。传统的方式是人工操作,不仅效率低下,且存在安全隐患,易导致玻璃破损及人员伤害。
2、现有技术提供机械手结构来进行玻璃的拿取和移动,机械手包括底板和手臂组成,手臂通过滑动结构连接底板,可以伸出或收回,可以便捷的拿取货架上相应位置的玻璃并移动放置到蚀刻机。
3、现有的机械手多为单层设计,在将玻璃放置到蚀刻机后需要等待玻璃完成刻蚀,取出刻蚀后的玻璃再放回到货架的指定位置,之后,拿取货架上的未刻蚀的玻璃再一次放置到蚀刻机,传输效率较低。
4、因此,需要对现有技术进行改进。
技术实现思路
1、本发明提供一种工业机器人用多关节机械手,用以解决上述问题。
2、本发明采用的一个技术方案是:提供一种工业机器人用多关节机械手,包括:
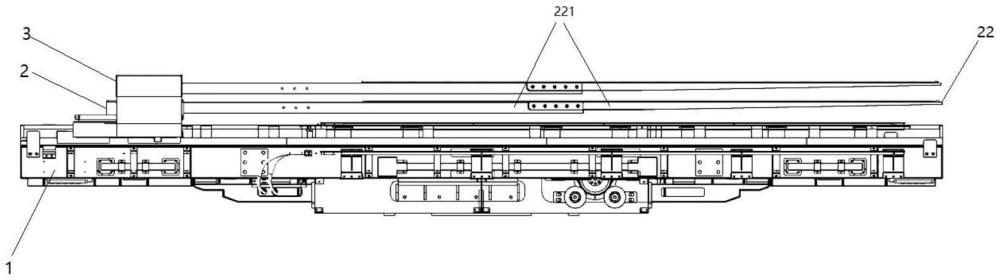
3、底座,所述底座上设置有内轨道和外轨道;
4、下层机械手,设置于所述内轨道上,可沿所述内轨道水平方向移动;
5、上层机械手,设置于所述外轨道上,可沿所述外轨道水平方向移动;
6、所述上层机械手和下层机械手独立驱动,可交替伸缩完成玻璃的拿取和放置。
7、进一步的,所述下层机械手包括下层支架和若干下层手臂,所述下层支架滑动设置在内轨道上,各个所述下层手臂均匀分布在下层支架一侧,用于承托下层的玻璃,所述上层机械手包括上层支架和若干上层手臂,所述上层支架横跨下层支架并滑动设置在外轨道上,各个所述上层手臂均匀分布在上层支架一侧,用于承托上层的玻璃,上、下层机械手在水平方向上的移动互不干扰。
8、进一步的,所述下层支架和上层支架的一侧均设置有若干连接接口,所述下层手臂通过相应的连接接口与下层支架可拆卸连接,所述上层手臂通过相应的连接接口与上层支架可拆卸连接,可根据玻璃的尺寸和重量调节支架上的手臂之间的间距、增加或减少手臂的数量。
9、进一步的,各个所述连接接口内均设置有感应器,用于识别连接接口内是否接有手臂。
10、进一步的,还包括控制系统,与各个感应器电连,将接受到的各个感应器的信号与预设的手臂配置情况对比,判断手臂是否正确连接。
11、进一步的,还包括警报器,与控制系统电连,当手臂连接异常时,警报器响,提示工作人员检查。
12、进一步的,所述下层手臂和上层手臂均包括至少两段关节,相邻的所述关节之间通过螺丝锁紧,可通过增、减关节数量来改变手臂的总长度。
13、进一步的,所述关节上覆盖有防滑层,用于保护玻璃,增加移动稳定性。
14、本发明一种工业机器人用多关节机械手的有益效果是:
15、1、通过内外轨道的设计将双层的机械手结构集成在底座上,并通过独立驱动设计,实现了上、下层机械手的独立控制,能够交替完成已刻蚀玻璃的拿取和未刻蚀玻璃的放置,显著提高了生产效率。
技术特征:
1.一种工业机器人用多关节机械手,其特征在于,包括:底座,所述底座上设置有内轨道和外轨道;
2.根据权利要求1所述的一种工业机器人用多关节机械手,其特征在于,所述下层机械手包括下层支架和若干下层手臂,所述下层支架滑动设置在内轨道上,各个所述下层手臂均匀分布在下层支架一侧,用于承托下层的玻璃,所述上层机械手包括上层支架和若干上层手臂,所述上层支架横跨下层支架并滑动设置在外轨道上,各个所述上层手臂均匀分布在上层支架一侧,用于承托上层的玻璃。
3.根据权利要求2所述的一种工业机器人用多关节机械手,其特征在于,所述下层支架和上层支架的一侧均设置有若干连接接口,所述下层手臂通过相应的连接接口与下层支架可拆卸连接,所述上层手臂通过相应的连接接口与上层支架可拆卸连接。
4.根据权利要求3所述的一种工业机器人用多关节机械手,其特征在于,各个所述连接接口内均设置有感应器,用于识别连接接口内是否接有手臂。
5.根据权利要求4所述的一种工业机器人用多关节机械手,其特征在于,还包括控制系统,与各个感应器电连,将接受到的各个感应器的信号与预设的手臂配置情况对比,判断手臂是否正确连接。
6.根据权利要求5所述的一种工业机器人用多关节机械手,其特征在于,还包括警报器,与控制系统电连,当手臂连接异常时,警报器响,提示工作人员检查。
7.根据权利要求1-6任一所述的一种工业机器人用多关节机械手,其特征在于,所述下层手臂和上层手臂均包括至少两段关节,相邻的所述关节之间通过螺丝锁紧。
8.根据权利要求7所述的一种工业机器人用多关节机械手,其特征在于,所述关节上覆盖有防滑层。
技术总结
本发明提供一种工业机器人用多关节机械手,包括:底座,所述底座上设置有内轨道和外轨道;下层机械手,设置于所述内轨道上,可沿所述内轨道水平方向移动;上层机械手,设置于所述外轨道上,可沿所述外轨道水平方向移动;所述上层机械手和下层机械手独立驱动,可交替伸缩完成玻璃的拿取和放置。本发明通过内外轨道的设计将双层的机械手结构集成在底座上,并通过独立驱动设计,实现了上、下层机械手的独立控制,能够交替完成已刻蚀玻璃的拿取和未刻蚀玻璃的放置,显著提高了生产效率。
技术研发人员:张雅茹,谢敏,徐伟,孟畅,郑瑞,张源,李淑贤,康云辉
受保护的技术使用者:常熟颢文电子科技有限公司
技术研发日:
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!