一种工业机器人移动轨道及工业机器人的制作方法
本发明涉及工业机器人,尤其涉及一种工业机器人移动轨道及工业机器人。
背景技术:
1、工业机器人是指在工业自动化的使用中,可对三个或三个以上轴进行编程的固定式或移动式,自动控制的、可重复编程、多用途的操作机,是一种面向工业领域的多关节机械手或多个自由度的机器装置。
2、经检索后发现,申请号为202021430163.0的中国专利,公开了“一种用于工业机器人的移动式轨道,涉及工业机器人轨道领域,包括主体,所述主体的一侧安装有第一电机,且第一电机的输出端位于主体的下方设置有链条,所述主体的一端设置有水平仪,且主体的底端设置有支撑架,所述支撑架的内壁设置有套筒”;但上述该工业机器人的移动式轨道在使用时,其工业机器人受限于轨道的长度,只能在铺设好的轨道上进行移动,如果需要对工业机器人的移动路径改变,则需要先行对轨道进行重新安装符合工业机器人移动路径的轨道,不能使得轨道的路径根据工业机器人的移动路径进行自主调整,因此,为了解决此类问题,提出了一种工业机器人移动轨道及工业机器人。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人移动轨道及工业机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种工业机器人,包括工业机器人本体和工业机器人移动轨道,所述工业机器人本体滑动设置在工业机器人移动轨道上;
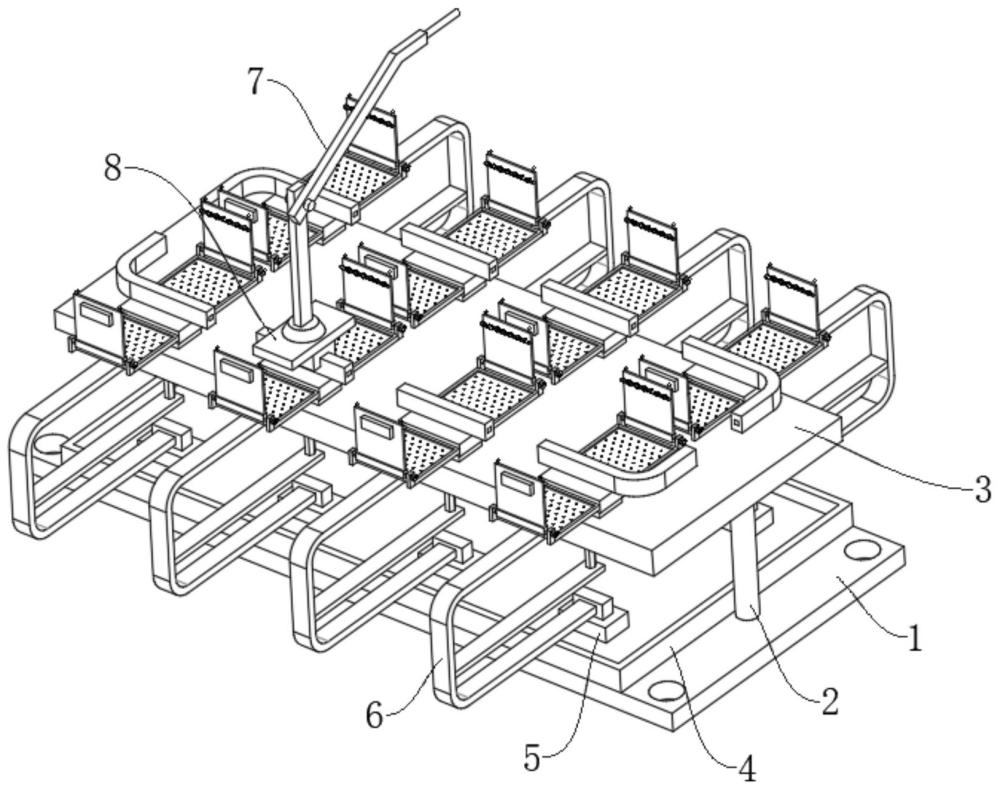
4、所述工业机器人移动轨道包括底板,底板上设置有若干个用于工业机器人本体移动的轨道机构,若干个轨道机构均连接有用于工业机器人本体移动的导轨; 所述工业机器人本体底端安装有安装板,安装板底部安装有电动滑块,电动滑块滑动安装在导轨上。
5、优选的,所述轨道机构包括设置在底板顶部的自动导引车,底板顶部安装有支撑柱,支撑柱顶部安装有顶板,自动导引车顶部安装有固定架,固定架顶端安装有承载板,承载板位于顶板上方,导轨安装在承载板顶部,若干个轨道机构连接的导轨,其中一部分为直线导轨,一部分为弧形导轨,一部分为曲线导轨,且直线导轨、弧形导轨和曲线导轨之间可互相连接,承载板两侧设置有用于对工业机器人本体进行防护的防护组件,固定架侧面设置有用于对承载板进行固定的刹车组件。
6、优选的,所述刹车组件包括安装在固定架侧面的条形板,条形板顶部安装有电动伸缩杆,电动伸缩杆的活塞杆末端安装有刹车片,刹车片位于顶板下方。
7、优选的,所述防护组件包括安装在承载板侧面的安装框,安装框内安装有弹力网,安装框远离承载板的一侧对称安装有第一固定板和第二固定板,第一固定板和第二固定板之间转动安装有透明钢化玻璃。
8、优选的,所述第一固定板远离透明钢化玻璃的一侧安装有电机,电机的输出轴贯穿第一固定板并连接有安装轴,安装轴外壁固定套接有安装套,透明钢化玻璃安装在安装套上。
9、优选的,所述第二固定板靠近安装轴的一侧安装有轴承,安装轴端部安装在轴承内圈,透明钢化玻璃顶部安装有蜂鸣报警器。
10、优选的,所述透明钢化玻璃靠近承载板的一侧倾斜向上安装有若干个灭火剂喷头,透明钢化玻璃远离承载板的一侧安装有二氧化碳灭火剂罐,二氧化碳灭火剂罐内装载有二氧化碳灭火剂,二氧化碳灭火剂罐连通有输送管,输送管与灭火剂喷头相连通,输送管内设置有电子阀门。
11、优选的,所述导轨两端均开设有安装槽,两个安装槽内均安装有接近开关。
12、优选的,所述自动导引车顶部安装有固定块,固定架底端安装在固定块侧面,固定架顶端安装有移动块,移动块滑动设置在顶板顶部,承载板安装在移动块顶部。
13、优选的,所述底板顶部安装有限位边框,自动导引车位于限位边框内。
14、与现有技术相比,本发明的有益效果是:
15、1:本发明中自动导引车在底板上任意移动即可带动若干个承载板顶部安装的导轨在顶板上进行任意移动,进而利用导轨一部分为直线导轨,一部分为弧形导轨,还有一部分为曲线导轨,并且其相互之间可以互相连接,即可利用若干个导轨任意移动进行排列组合,进而可以组合出不同路径的导轨,可以将导轨的路径组合排列成工业机器人本体需要移动路径的组合供工业机器人本体移动。
16、2:本发明中只需要利用若干个导轨进行组合排列即可得到符合工业机器人本体移动路径的导轨,可以根据工业机器人本体的移动路径组合排列出不同的导轨路径,达到为工业机器人本体铺路的目的,可以使得工业机器人本体移动、拐弯和调头等便捷快速,不需要重新安装工业机器人本体的行走轨道即可使得工业机器人本体得到所需路径的导轨,进而使得工业机器人本体不受传统轨道的路径限制。
17、3:本发明中电动伸缩杆的活塞杆推动刹车片上移,使得刹车片与顶板底部相接触,即可对自动导引车进行刹车处理,可以将自动导引车的位置固定,进而将承载板顶部安装的导轨的位置固定,方便若干个导轨组合排列后位置固定,避免工业机器人本体在导轨上移动时造成导轨晃动影响工业机器人本体的移动稳定性,具备自动对导轨位置固定的功能。
18、4:本发明中将透明钢化玻璃旋转至竖直状态,可以使得工业机器人本体处于两个透明钢化玻璃之间,可以利用两个透明钢化玻璃为工业机器人本体提供防护作用,避免工业机器人本体在工作时碰撞到外界外物或者工作人员等,可以为工作的工业机器人本体提供遮挡防护,并且采用透明钢化玻璃为工业机器人本体提供防护,其工作人员可以随时通过透明钢化玻璃观察工业机器人本体的工作状态,不影响工作人员对工业机器人本体的工作状态进行随时查看。
19、5:本发明中工业机器人本体在工作时拿取的物品掉落时可以利用弹力网对工业机器人本体拿取掉落的物品进行收集,避免工业机器人本体拿取掉落的物品砸落在导轨上造成导轨的损坏,并且可以避免工业机器人本体拿取掉落的物品砸坏其他设备或者工作人员,提高工业机器人本体工作时的安全性,可以利用蜂鸣报警器的报警声音实时提醒工作人员其工业机器人本体的实时位置,可以随时将工业机器人本体的具体位置标记出来,方便工作人员实时留意工业机器人本体的具体位置,并且在工业机器人本体的具体位置处发出警报提醒周围工作人员工业机器人本体在该处,减少意外。
技术特征:
1.一种工业机器人,包括工业机器人本体(7)和工业机器人移动轨道,其特征在于,所述工业机器人本体(7)滑动设置在工业机器人移动轨道上;
2.根据权利要求1所述的一种工业机器人,其特征在于,所述轨道机构包括设置在底板(1)顶部的自动导引车(5),底板(1)顶部安装有支撑柱(2),支撑柱(2)顶部安装有顶板(3),自动导引车(5)顶部安装有固定架(6),固定架(6)顶端安装有承载板(14),承载板(14)位于顶板(3)上方,导轨(15)安装在承载板(14)顶部,若干个轨道机构连接的导轨(15),其中一部分为直线导轨,一部分为弧形导轨,一部分为曲线导轨,且直线导轨、弧形导轨和曲线导轨之间可互相连接,承载板(14)两侧设置有用于对工业机器人本体(7)进行防护的防护组件,固定架(6)侧面设置有用于对承载板(14)进行固定的刹车组件。
3.根据权利要求2所述的一种工业机器人,其特征在于,所述刹车组件包括安装在固定架(6)侧面的条形板(10),条形板(10)顶部安装有电动伸缩杆(11),电动伸缩杆(11)的活塞杆末端安装有刹车片(12),刹车片(12)位于顶板(3)下方。
4.根据权利要求2所述的一种工业机器人,其特征在于,所述防护组件包括安装在承载板(14)侧面的安装框(17),安装框(17)内安装有弹力网(18),安装框(17)远离承载板(14)的一侧对称安装有第一固定板(19)和第二固定板(20),第一固定板(19)和第二固定板(20)之间转动安装有透明钢化玻璃(24)。
5.根据权利要求4所述的一种工业机器人,其特征在于,所述第一固定板(19)远离透明钢化玻璃(24)的一侧安装有电机(21),电机(21)的输出轴贯穿第一固定板(19)并连接有安装轴,安装轴外壁固定套接有安装套(23),透明钢化玻璃(24)安装在安装套(23)上。
6.根据权利要求5所述的一种工业机器人,其特征在于,所述第二固定板(20)靠近安装轴的一侧安装有轴承(28),安装轴端部安装在轴承(28)内圈,透明钢化玻璃(24)顶部安装有蜂鸣报警器(27)。
7.根据权利要求4所述的一种工业机器人,其特征在于,所述透明钢化玻璃(24)靠近承载板(14)的一侧倾斜向上安装有若干个灭火剂喷头(25),透明钢化玻璃(24)远离承载板(14)的一侧安装有二氧化碳灭火剂罐(26),二氧化碳灭火剂罐(26)内装载有二氧化碳灭火剂,二氧化碳灭火剂罐(26)连通有输送管,输送管与灭火剂喷头(25)相连通,输送管内设置有电子阀门。
8.根据权利要求1所述的一种工业机器人,其特征在于,所述导轨(15)两端均开设有安装槽,两个安装槽内均安装有接近开关(22)。
9.根据权利要求2所述的一种工业机器人,其特征在于,所述自动导引车(5)顶部安装有固定块(9),固定架(6)底端安装在固定块(9)侧面,固定架(6)顶端安装有移动块(13),移动块(13)滑动设置在顶板(3)顶部,承载板(14)安装在移动块(13)顶部。
10.根据权利要求2所述的一种工业机器人,其特征在于,所述底板(1)顶部安装有限位边框(4),自动导引车(5)位于限位边框(4)内。
技术总结
本发明涉及工业机器人技术领域,具体的公开了一种工业机器人移动轨道及工业机器人,包括工业机器人本体和工业机器人移动轨道,所述工业机器人本体滑动设置在工业机器人移动轨道上;所述工业机器人移动轨道包括底板,底板上设置有若干个用于工业机器人本体移动的轨道机构。本发明中自动导引车在底板上任意移动即可带动若干个承载板顶部安装的导轨在顶板上进行任意移动,进而利用导轨一部分为直线导轨,一部分为弧形导轨,还有一部分为曲线导轨,并且其相互之间可以互相连接,即可利用若干个导轨任意移动进行排列组合,进而可以组合出不同路径的导轨,可以将导轨的路径组合排列成工业机器人本体需要移动路径的组合供工业机器人本体移动。
技术研发人员:陈玉辉,姜博文,高晟
受保护的技术使用者:江苏荟轩精工股份有限公司
技术研发日:
技术公布日:2024/12/26
- 还没有人留言评论。精彩留言会获得点赞!