一种应用于深海的柔性作业机器人
本发明属于水下作业设备,具体涉及一种应用于深海的柔性作业机器人。
背景技术:
1、随着深海资源的开采、海洋环境监测以及生物多样性研究的深入,搭载水下作业用机械臂的水下机器人得到越来越广泛的应用。目前,水下机器人搭载的水下作业用机械臂大都为刚性机械臂,传统的刚性机械臂在水下环境中存在着一些困难和局限性,它们的结构通常较为笨重,无法灵活地适应狭窄的水下空间和复杂的水下地形,难以自由弯曲和伸展以适应不规则的水下环境。这往往会影响作业效率,增加潜在的安全隐患。
2、基于以上问题,本申请提出一种应用于深海的柔性作业机器人,其上搭载软体机械臂代替了传统的刚性机械臂,具有轻便、灵活弯曲伸展的优势。
技术实现思路
1、本发明的目的是为克服上述现有技术的不足,提供一种应用于深海的柔性作业机器人。
2、为实现上述目的,本发明采用如下技术方案:
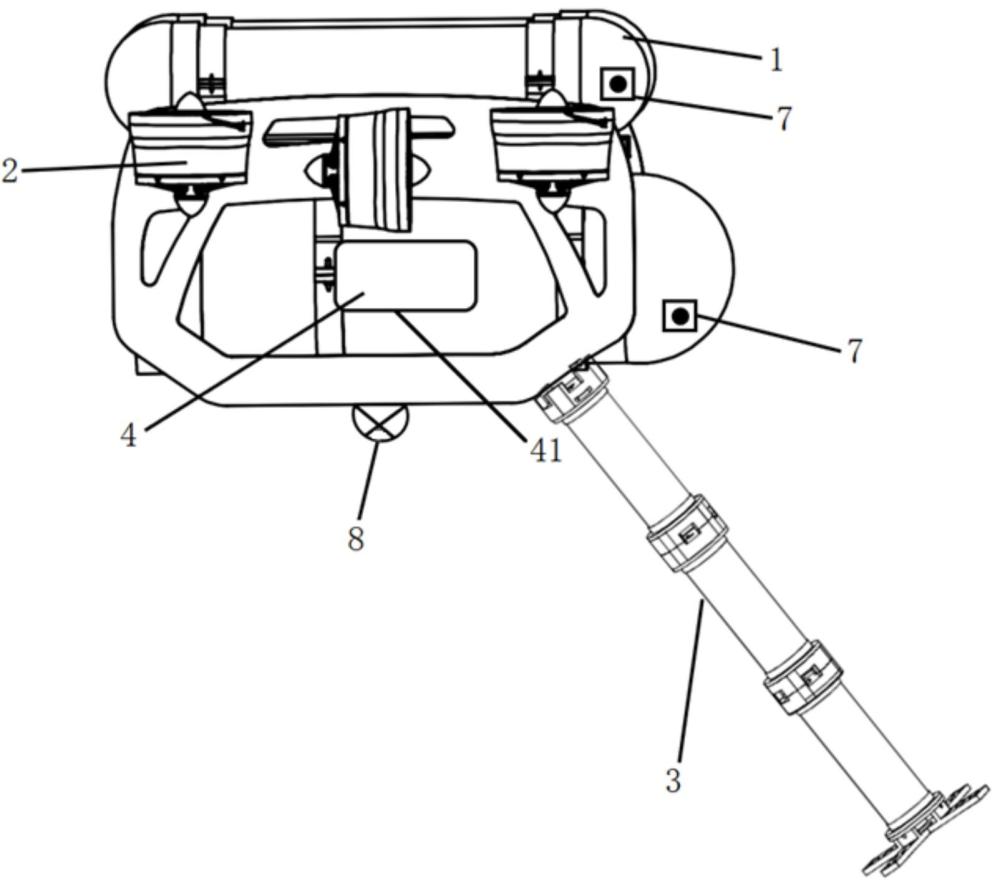
3、一种应用于深海的柔性作业机器人,包括适配有推进器的机器人本体,所述机器人本体上设置软体机械臂、双目摄像头以及惯性导航系统;
4、所述软体机械臂包括若干依次相连的软体模块,所述软体模块包括一个扭转模块以及两个弯曲模块;所述扭转模块的首端与机器人本体固连、尾端与第一个弯曲模块的首端固连,第一个弯曲模块的尾端与第二个弯曲模块的首端固连;
5、所述扭转模块内设置有呈环形结构的扭转驱动腔;
6、所述弯曲模块内设置有三个沿圆周方向均匀分布的弯曲驱动腔,所述弯曲驱动腔的径向截面呈扇形结构,所述弯曲驱动腔的径向内壁面呈圆柱面结构,所述弯曲驱动腔的径向外壁面呈波纹管壁面样式的起伏结构;
7、所述扭转驱动腔、弯曲驱动腔均与液压驱动系统相连。
8、优选的,所述扭转模块包括呈圆柱状结构的扭转硅胶臂,所述扭转硅胶臂的中部设置有沿轴向贯通的扭转穿线孔;所述扭转驱动腔位于扭转硅胶臂内且沿轴向进行贯通;
9、所述扭转硅胶臂的轴向两端固定设置有能够对扭转驱动腔进行密封的扭转连接件;
10、所述扭转硅胶臂首端的扭转连接件与机器人本体固连、尾端的扭转连接件与第一个弯曲模块固连。
11、优选的,所述弯曲模块包括呈圆柱状结构的弯曲硅胶臂,所述弯曲驱动腔位于弯曲硅胶臂内且沿轴向进行贯通;
12、所述弯曲硅胶臂的轴向两端固定设置有能够对弯曲硅胶臂进行密封的弯曲连接件;
13、所述扭转硅胶臂尾端的扭转连接件与第一个弯曲模块首端的弯曲连接件固连,两个弯曲模块之间通过相应的弯曲连接件进行固连。
14、优选的,所述弯曲硅胶臂包括硅胶臂本体,所述硅胶臂本体内沿圆周方向均匀设置三个贯通槽,所述贯通槽内嵌有驱动腔本体,所述弯曲驱动腔位于驱动腔本体内且沿轴向进行贯通;
15、所述驱动腔本体的外壁面形状与弯曲驱动腔壁面形状一致,所述贯通槽的壁面形状与驱动腔本体的外壁面形状相适配;
16、所述硅胶臂本体的中部设置有沿轴向贯通的弯曲穿线孔,所述弯曲穿线孔的壁面上设置呈环形结构的限制拉伸层。
17、优选的,所述硅胶臂本体采用邵氏硬度40、拉伸率680%的硅胶材料制成;
18、所述驱动腔本体采用邵氏硬度20、拉伸率1000%的硅胶材料制成;
19、所述限制拉伸层采用邵氏硬度30、拉伸率150%的硅胶制成。
20、优选的,所述扭转硅胶臂、弯曲硅胶臂的外壁面上均缠绕凯拉夫纤维线。
21、优选的,所述液压驱动系统包括第一液压马达泵、海水过滤机构、第二液压马达泵,所述第一液压马达泵、海水过滤机构、第二液压马达泵通过耐压支架设置在机器人本体上;
22、所述第一液压马达泵的入口伸出机器人本体,所述第一液压马达泵的出口与海水过滤机构的入口进行管路连接,所述海水过滤机构的出口设置有七条分别连接至扭转驱动腔以及各个弯曲驱动腔的液压支路;
23、每条液压支路上均连有一条回流支路,七条回流支路的端部均与第二液压马达泵的入口相连,所述第二液压马达泵的出口伸出机器人本体;
24、所述液压支路上设置加压阀,所述回流支路上设置回流阀。
25、优选的,各个软体模块的尾端以及机器人本体与扭转模块相连的位置处均设置有姿态传感器;
26、所述液压支路与相应腔室连通的位置处设置有压力传感器。
27、本发明的有益效果是:
28、(1)本发明中,扭转模块采用单腔室驱动结构,当扭转驱动腔加压膨胀时,螺旋缠绕在扭转模块外侧的凯拉夫纤维线在限制其径向膨胀的同时使轴向的拉伸转化为周向的旋转,实现扭转模块扭转动作的实现;弯曲模块采用扇形类波纹管状内部腔室结构,单段弯曲模块通过三个弯曲驱动腔的压强配合实现朝各个方向弯曲;本申请中弯曲模块和扭转模块的协同配合,让软体机械臂在狭窄的水下环境中拥有出色的灵活性,与传统的钢制机械臂受制于自由度有限不同,本申请中的软体机械臂可通过相应腔室压力的调控实现各个方向的自由摆动,大大提高了在复杂水下环境中的作业能力,克服了因环境因素而导致作业受阻的问题。
29、(2)本发明中弯曲模块采用了波纹管状的内部腔室结构,使得软体机械臂相较于传统腔室结构具有更好的弯曲性能,增大了软体机械臂的作业范围;本申请中弯曲驱动腔较传统的圆形直通腔,在相同的压力驱动下,具有更好的弯曲性能和灵活性。
30、(3)本发明弯曲模块中各个部位硅胶材料的配置不仅满足了弯曲模块在发生较大弯曲时仍具有良好的负载能力,同时也保证了整体的柔韧性和变形性。
31、(4)本申请中的液压驱动系统搭载了海水过滤机构,第一液压马达泵直接抽取海水,并经海水过滤机构进行过滤,而回流的海水经第二液压马达泵排至大海,将过滤后的海水作为驱动源,这样不仅省去了油箱的重量,大幅减轻了整体负载,而且使用海水作为驱动源也无需担心源供应不足的问题,完全满足软体机械臂的驱动需求;本申请液压驱动系统通过精准调控各个加压阀、回流阀的开合状态,就能实现对单一腔室的独立驱动。
技术特征:
1.一种应用于深海的柔性作业机器人,包括适配有推进器的机器人本体,其特征在于,所述机器人本体上设置软体机械臂、双目摄像头以及惯性导航系统;
2.如权利要求1所述的应用于深海的柔性作业机器人,其特征在于,所述扭转模块包括呈圆柱状结构的扭转硅胶臂,所述扭转硅胶臂的中部设置有沿轴向贯通的扭转穿线孔;所述扭转驱动腔位于扭转硅胶臂内且沿轴向进行贯通;
3.如权利要求2所述的应用于深海的柔性作业机器人,其特征在于,所述弯曲模块包括呈圆柱状结构的弯曲硅胶臂,所述弯曲驱动腔位于弯曲硅胶臂内且沿轴向进行贯通;
4.如权利要求3所述的应用于深海的柔性作业机器人,其特征在于,所述弯曲硅胶臂包括硅胶臂本体,所述硅胶臂本体内沿圆周方向均匀设置三个贯通槽,所述贯通槽内嵌有驱动腔本体,所述弯曲驱动腔位于驱动腔本体内且沿轴向进行贯通;
5.如权利要求4所述的应用于深海的柔性作业机器人,其特征在于,所述硅胶臂本体采用邵氏硬度40、拉伸率680%的硅胶材料制成;
6.如权利要求3所述的应用于深海的柔性作业机器人,其特征在于,所述扭转硅胶臂、弯曲硅胶臂的外壁面上均缠绕凯拉夫纤维线。
7.如权利要求1所述的应用于深海的柔性作业机器人,其特征在于,所述液压驱动系统包括第一液压马达泵、海水过滤机构、第二液压马达泵,所述第一液压马达泵、海水过滤机构、第二液压马达泵通过耐压支架设置在机器人本体上;
8.如权利要求7所述的应用于深海的柔性作业机器人,其特征在于,各个软体模块的尾端以及机器人本体与扭转模块相连的位置处均设置有姿态传感器;
技术总结
本发明公开了一种应用于深海的柔性作业机器人,属于水下作业设备技术领域,包括适配有推进器的机器人本体,机器人本体上设置软体机械臂、双目摄像头以及惯性导航系统;软体机械臂包括若干依次相连的软体模块,软体模块包括一个扭转模块以及两个弯曲模块;扭转模块内设置呈环形结构的扭转驱动腔;弯曲模块内设置三个弯曲驱动腔,弯曲驱动腔的径向截面呈扇形结构,弯曲驱动腔的径向内壁面呈圆柱面结构,弯曲驱动腔的径向外壁面呈波纹管壁面样式的起伏结构;扭转驱动腔、弯曲驱动腔均与液压驱动系统相连。本发明中弯曲模块和扭转模块协同配合,通过相应腔室压力的调控实现各个方向的自由摆动,大大提高了在复杂水下环境中的作业能力。
技术研发人员:陈云赛,李畅,李明宇,刘增凯,张栋,姜清华,高永,张辰玮
受保护的技术使用者:青岛哈尔滨工程大学创新发展中心
技术研发日:
技术公布日:2024/11/28
- 还没有人留言评论。精彩留言会获得点赞!