本发明涉及晶片传送机器人领域,具体涉及一种外转子电机真空蛙手机器人。
背景技术:
1、在芯片前段制程工艺中,晶圆片需要在高真空洁净环境下通过晶圆片搬运机械臂将晶圆片搬运到不同制程工艺设备,蛙手作为常用的晶圆传片机械臂广泛应用于不同晶圆制程间传片过程,蛙手轴系联接的机械臂主要由内转子电机驱动,具有高效精准的运动特性,对于前段制程晶圆厂而言,外转子结构能够利用轴向空间优化电机绕组提升电机扭矩,使电机在不改变平面空间的径向尺寸的前提下提升电机扭转力矩,因此,追求更小的平面占用空间和更强性能的晶圆搬运设备,使用外转子电机是当前机械臂发展趋势。
技术实现思路
1、本发明的目的在于提供一种外转子电机真空蛙手机器人,旨在使用外转子电机替代传统的机器人的电机,使机器人的结构更加紧凑。
2、为实现上述目的,本发明具体提供下述技术方案:
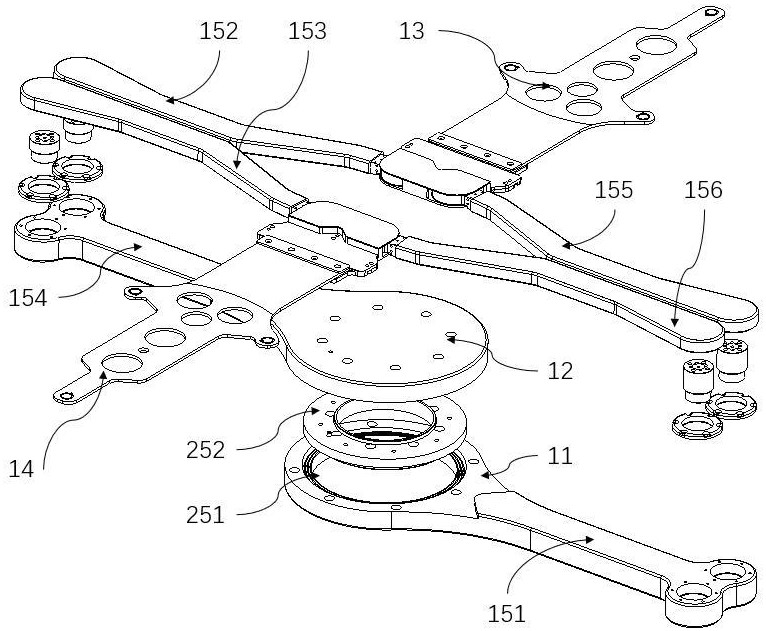
3、一种外转子电机真空蛙手机器人,包括:机械臂,包括同轴设置并且用于接收动力源的驱动以执行旋转动作的第一旋转部和第二旋转部,以及对称设置并且传动连接于所述第一旋转部和所述第二旋转部以执行旋转动作和径向伸缩动作的第一手和第二手;旋转驱动装置,包括同轴设置并且自下而上顺序地固定连接的定子安装座、第一定子和第二定子,以及分别可旋转地套接在所述第一定子和所述第二定子的外侧的第一转子和第二转子,所述定子安装座的外侧套接有转子连接座,所述转子连接座与所述第一转子固定连接,并且通过第一轴承连接并且搭靠在所述定子安装座的顶端,所述第二转子通过第二轴承连接并且搭靠在所述转子连接座的顶端,使所述转子连接座能够相对于所述第二转子旋转,其中,所述第一转子通过所述转子连接座固定连接于所述第一旋转部,所述第二转子固定连接于所述第二旋转部;升降驱动装置,传动连接于所述定子安装座,并且用于驱动所述定子安装座沿着竖直方向移动;台架,用于固定安装所述升降驱动装置。
4、进一步的,所述机械臂还包括:第一驱动臂,固定连接于所述第一旋转部,并且径向向外伸出;第一从动臂,一端可环绕竖直轴线旋转地连接于所述第一驱动臂远离所述第一旋转部的一端,另一端可环绕竖直轴线旋转地连接于所述第一手;第二从动臂,一端可环绕竖直轴线旋转地连接于所述第一驱动臂远离所述第一旋转部的一端,另一端可环绕竖直轴线旋转地连接于所述第二手;第二驱动臂,固定连接于所述第二旋转部,并且径向向外伸出;第三从动臂,一端可环绕竖直轴线旋转地连接于所述第二驱动臂远离所述第二旋转部的一端,另一端可环绕竖直轴线旋转地连接于所述第一手;第四从动臂,一端可环绕竖直轴线旋转地连接于所述第二驱动臂远离所述第二旋转部的一端,另一端可环绕竖直轴线旋转地连接于所述第二手;第一联动机构,传动连接于第一从动臂和第三从动臂,使第一从动臂和第三从动臂始终相对于彼此同速、反向运动;第二联动机构,传动连接于第二从动臂和第四从动臂,使第二从动臂和第四从动臂始终相对于彼此同速、反向运动。
5、进一步的,所述第一驱动臂的长度等于所述第二驱动臂的长度,所述第一从动臂的长度等于所述第二从动臂的长度,所述第三从动臂的长度等于所述第四从动臂,所述第一从动臂和所述第二从动臂分别对称地连接于所述第一驱动臂的宽度方向上的两侧,所述第三从动臂和所述第三从动臂分别对称地连接于所述第二驱动臂的宽度方向上的两侧。
6、进一步的,所述第一驱动臂和所述第二驱动臂相对于所述旋转驱动装置的轴线对称时,所述第一手和所述第二手相对于所述旋转驱动装置的轴线的距离相等。
7、进一步的,所述第一联动机构和所述第二联动机构是8字形钢带,所述第一联动机构传动连接所述第一从动臂和所述第三从动臂连接于所述第一驱动臂的转动轴,所述第二联动机构传动连接所述第二从动臂和所述第四从动臂连接于所述第一驱动臂的转动轴。
8、进一步的,所述第二轴承上覆盖有迷宫式密封圈,所述迷宫式密封圈包括:第一随动齿,呈现出圆环形状,同轴地固定连接于所述第一旋转部,并且覆盖在所述第二轴承的上方,具备向上延伸的第一齿;第二随动齿,呈现出圆环形状,同轴地固定连接于所述第二旋转部,并且覆盖在所述第一随动齿的上方,具备向下延伸的第二齿;所述第一齿和所述第二齿均呈现出若干同心圆环的形状,所述第一齿和所述第二齿分别插入彼此的齿槽中,所述第一随动齿和所述第二随动齿之间的间隙形成迷宫密封结构,所述第一随动齿和所述第二随动齿在相对旋转的运动中互不接触。
9、进一步的,所述第一齿的齿顶与所述第二齿的齿根之间的距离等于所述第二齿的齿顶与所述第一齿的齿根之间的距离,所述第一齿的侧壁与所述第二齿的侧壁之间的距离小于所述第一齿的齿顶与所述第二齿的齿根之间的距离。
10、进一步的,所述定子安装座上安装有冷却系统,所述冷却系统包括:外侧隔离套,固定连接于所述定子安装座并且套装在所述第一定子和所述第二定子的外侧,从而在所述第一定子和所述第二定子的外侧形成圆筒形状的进液流道;内侧隔离套,固定连接于所述定子安装座并且插设于所述第一定子和所述第二定子的内侧,从而在所述第一定子和所述第二定子的内侧形成圆筒形状的出液流道;内置换热器,集成于所述定子安装座,通过第一电磁阀连接于所述出液流道;外置散热器,设置在所述台架的外部,通过第二电磁阀连接于所述出液流道;循环泵,一端通过第三电磁阀和第四电磁阀分别连接于所述内置换热器和所述外置散热器,另一端连接于所述进液流道,所述第一电磁阀和所述第三电磁阀开启时所述循环泵和所述内置换热器形成与所述第一定子、所述第二定子换热的内置冷却系统,所述第二电磁阀和所述第四电磁阀开启时所述循环泵和所述外置散热器形成与所述第一定子、所述第二定子换热的外置冷却系统。
11、进一步的,所述外侧隔离套和所述内侧隔离套与所述定子安装座之间的安装间隙通过定子密封圈密封,所述定子安装座上形成有连接进液管道的进液口,以及连接出液管道的出液口。
12、进一步的,所述内置换热器包括:换热管道,盘绕于所述定子安装座的底部,一端通过所述第一电磁阀连接于所述出液流道,另一端通过所述第三电磁阀连接于所述循环泵;散热鳍片,套装于所述定子安装座的外侧,用于被动地与大气交换热量,使所述定子安装座的温度下降。
13、本申请与现有技术相比较具有如下有益效果:
14、提供一种外转子电机真空蛙手机器人,使用外转子电机替代传统的机器人的电机,以驱动第一手和第二手执行旋转和径向伸缩的传片动作,从而使机器人的结构更加紧凑。
技术特征:1.一种外转子电机真空蛙手机器人,其特征在于,包括:
2.根据权利要求1所述的一种外转子电机真空蛙手机器人,其特征在于,
3.根据权利要求2所述的一种外转子电机真空蛙手机器人,其特征在于,
4.根据权利要求3所述的一种外转子电机真空蛙手机器人,其特征在于,
5.根据权利要求4所述的一种外转子电机真空蛙手机器人,其特征在于,
6.根据权利要求1所述的一种外转子电机真空蛙手机器人,其特征在于,
7.根据权利要求6所述的一种外转子电机真空蛙手机器人,其特征在于,
8.根据权利要求1所述的一种外转子电机真空蛙手机器人,其特征在于,
9.根据权利要求8所述的一种外转子电机真空蛙手机器人,其特征在于,
10.根据权利要求8所述的一种外转子电机真空蛙手机器人,其特征在于,
技术总结本发明涉及晶片传送机器人领域,具体涉及一种外转子电机真空蛙手机器人,包括:机械臂,包括同轴设置的第一旋转部和第二旋转部,以及传动连接于第一旋转部和第二旋转部以执行旋转动作和径向伸缩动作的第一手和第二手;旋转驱动装置,包括同轴设置并且自下而上顺序地固定连接的定子安装座、第一定子和第二定子,以及分别可旋转地套接在第一定子和第二定子的外侧的第一转子和第二转子,第一转子通过转子连接座固定连接于第一旋转部,第二转子固定连接于第二旋转部。本发明的实施例使用外转子电机替代传统的机器人的电机,以驱动第一手和第二手执行旋转和径向伸缩的传片动作,从而使机器人的结构更加紧凑。
技术研发人员:倪植,阳伏成,王清川
受保护的技术使用者:苏州纳道精运半导体科技有限公司
技术研发日:技术公布日:2024/11/26