一种气动式蛇形软体机器人
本发明涉及机器人,具体为一种气动式蛇形软体机器人。
背景技术:
1、管道在石油化工、农林灌溉、城市供排水等领域广泛应用,在介质输送过程中,由于输送介质的沉积和污染物堵塞,常会导致管道破裂或介质泄漏,因此需要特定的手段对管道进行检测;
2、现有的技术采用了管道机器人对管道进行检测,但目前的管道机器人多为缆线式机器人,材质为刚性,刚性管道机器人受其自身材质的限制,不便于在多弯曲的管道内进行作业,且其刚性材质的机器人对管道内壁易造成损伤;
3、此外,缆线式管道机器人本体与控制系统分离,其后部拖拽大量电缆或气缆,在管道内进行长距离作业时,特别是遇到带有角度的弯管时,随着爬行距离增加,线缆自重以及拖缆阻力持续增加,机器人牵引力随之大幅下降,直至无法前行,严重限制了其工作范围,极大地影响了机器人工作效率;
4、综上所述,如何设计一种气动式蛇形软体机器人,使其在能够在多弯曲的管道内进行作业,其材质不会对管道内壁造成损伤,且无需额外添加线缆从而不影响其工作范围、工作效率,成为亟待解决的问题。
技术实现思路
1、本发明的目的在于提供一种气动式蛇形软体机器人,以解决以上的问题。
2、为达到以上目的,提供以下技术方案:
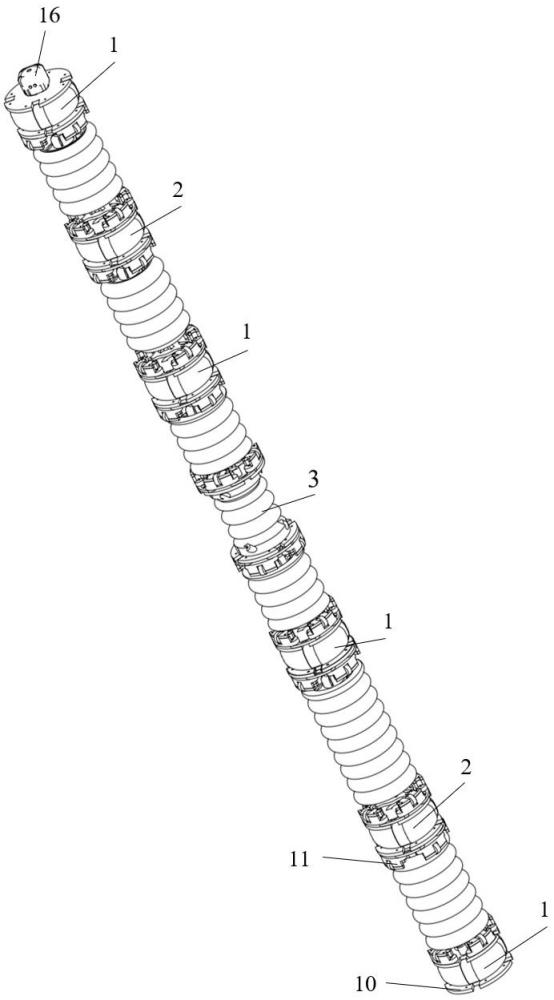
3、一种气动式蛇形软体机器人,包括:锚固足单元、支撑足单元、躯体、电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元、供电模块、足支架组件、躯体支架以及球铰支座;
4、每个所述支撑足单元均设置于一对锚固足单元之间,相邻的两个锚固足单元与设置于二者之间的一个支撑足单元构成一个运动模组,所述运动模组以躯体为中心,对称安装于其左右两端;
5、所述电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元以及供电模块自软体机器人的一端向其另一端依次排列设置,且所述电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元以及供电模块的两端均通过球铰支座与锚固足单元、支撑足单元或躯体中的一种相连接;
6、所述锚固足单元两端安装于足支架组件上,其中心设有锚固足孔,内部设有环形气腔,并设有导气孔,用于连接气管并输入压力气体,所述锚固足单元能够沿其径向伸缩;
7、所述支撑足单元中心设有通孔,安装于足支架组件上,用于辅助支撑机器人本体;
8、所述躯体安装于躯体支架上,其两端设有倒锥形凸起,中部设有伸缩体,所述伸缩体内部阵列开设锥柄形空腔,并设有进气孔,所述躯体内输入压力气体时,所述躯体沿其轴向伸展。
9、优选地,所述电磁换向模块包括电磁换向阀、换向阀支架以及护套,所述电磁换向阀两两一组,分别用于控制锚固足单元和躯体通放气以及对气路气压过载保护;
10、所述供压模块包括微泵、供压模块支架以及护套,用于供给压力气体;
11、所述换向控制模块包括换向继电器、换向继电器支架以及护套,所述换向继电器呈中心对称地安装于换向继电器支架内,用于控制电磁换向阀通断电;
12、所述过载保护模块包括过载继电器、过载继电器支架和护套,所述过载继电器呈中心对称地安装于过载继电器支架内,用于防止电磁换向阀过载;
13、所述中央控制单元包括气压传感器、数据接收模块、电压转换模块、单片机、开关、数据转换模块、控制单元支架以及护套;
14、所述供电模块包括电池、供电模块支架以及护套,用于供电;
15、所述中央控制单元用于控制锚固足单元和躯体的通放气顺序,所述躯体用于通过其充压伸展和泄压回缩驱使机器人本体移动。
16、优选地,所述足支架组件为圆盘状结构,其边缘处均布四个矩形槽口,所述矩形槽口处设有连接板,所述软体机器人还包括支撑轮组件,所述支撑轮组件和足支架组件均与连接板固定连接;
17、所述足支架组件包括前足支架和后足支架,所述前足支架一侧中心设有中空的圆筒状凸台,所述后足支架一侧中心设有圆柱状凸台,其端面设有螺旋凸起,所述前足支架、后足支架的另一侧均设有三个连接圆柱,所述连接圆柱中心开孔设置,用于连接球铰支座,所述圆筒状凸台的一端设有螺旋腔槽,内侧壁上设有圆孔,所述导气孔限位设置于圆孔中,所述螺旋凸起与螺旋腔槽相匹配,用于锁紧锚固足单元。
18、优选地,所述支撑轮组件包括支撑座、轮壳、支撑轮、轮轴和弹簧,所述支撑座外部为圆弧状结构,其内开设有矩形轮槽,所述矩形轮槽两侧对称设有与矩形轮槽相通的矩形凹槽,所述支撑轮与轮轴相连接,设置于矩形轮槽内,所述弹簧设置于轮轴两端,对应位于矩形凹槽中。
19、优选地,所述躯体支架由两个相对称的连接件构成,两个所述连接件底部固定连接有圆盘底座,所述圆盘底座上设有连接圆柱,所述连接件内部开设有圆锥台状凹槽,所述躯体上的倒锥形凸起限位设置于圆锥台状凹槽中。
20、优选地,所述球铰支座包括球支座和球套支座,所述球支座和球套支座的底部均为三角型结构,其边角处设有安装孔,用于安装连接圆柱,所述球支座的一端面上设有球头,所述球套支座的一端面上设有球套,所述球套内开设有与球头相匹配的球槽,所述球头限位设置于球槽中。
21、优选地,所述护套为软质材质,所述护套能够沿其轴向进行伸展或收缩运动。
22、优选地,所述软体机器人上还设有视觉传感模块。
23、优选地,所述锚固足单元与支撑足单元的结构相同。
24、本发明的有益效果为:
25、1.本发明的软体机器人采用串联式的模块化设计,通过球铰支座将电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元和供电模块由前至后依次串接于各锚固足、支撑足和躯体之间,组成了串联的模块化结构,串联式设计使各个模块相互独立又相互联系,同时便于添加新功能模块以适应新的工作需求;
26、2.本发明的机器人采用机电集成方式,包含供压模块与供电模块,为整个机器人提供能源和动力,实现了机器人在管内的无缆线作业方式,进一步提高了工作效率;
27、3.本发明各足周向布置的弹性支撑轮组有效缓解了机器人在管道内爬行时所受的摩擦阻力;弹性可压缩式设计,使机器人可适应一定管径的变化;采用球铰支座连接方式增强了机器人的灵活性,使机器人能够适应带有角度弯管道的工作环境。
技术特征:
1.一种气动式蛇形软体机器人,其特征在于,包括:锚固足单元、支撑足单元、躯体、电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元、供电模块、足支架组件、躯体支架以及球铰支座;
2.根据权利要求1所述的气动式蛇形软体机器人,其特征在于,所述电磁换向模块包括电磁换向阀、换向阀支架以及护套,所述电磁换向阀两两一组,分别用于控制锚固足单元和躯体通放气以及对气路气压过载保护;
3.根据权利要求2所述的气动式蛇形软体机器人,其特征在于,所述足支架组件为圆盘状结构,其边缘处均布四个矩形槽口,所述矩形槽口处设有连接板,所述软体机器人还包括支撑轮组件,所述支撑轮组件和足支架组件均与连接板固定连接;
4.根据权利要求3所述的气动式蛇形软体机器人,其特征在于,所述支撑轮组件包括支撑座、轮壳、支撑轮、轮轴和弹簧,所述支撑座外部为圆弧状结构,其内开设有矩形轮槽,所述矩形轮槽两侧对称设有与矩形轮槽相通的矩形凹槽,所述支撑轮与轮轴相连接,设置于矩形轮槽内,所述弹簧设置于轮轴两端,对应位于矩形凹槽中。
5.根据权利要求4所述的气动式蛇形软体机器人,其特征在于,所述躯体支架由两个相对称的连接件构成,两个所述连接件底部固定连接有圆盘底座,所述圆盘底座上设有连接圆柱,所述连接件内部开设有圆锥台状凹槽,所述躯体上的倒锥形凸起限位设置于圆锥台状凹槽中。
6.根据权利要求5所述的气动式蛇形软体机器人,其特征在于,所述球铰支座包括球支座和球套支座,所述球支座和球套支座的底部均为三角型结构,其边角处设有安装孔,用于安装连接圆柱,所述球支座的一端面上设有球头,所述球套支座的一端面上设有球套,所述球套内开设有与球头相匹配的球槽,所述球头限位设置于球槽中。
7.根据权利要求6所述的气动式蛇形软体机器人,其特征在于,所述护套为软质材质,所述护套能够沿其轴向进行伸展或收缩运动。
8.根据权利要求7所述的气动式蛇形软体机器人,其特征在于,所述软体机器人上还设有视觉传感模块。
9.根据权利要求8所述的气动式蛇形软体机器人,其特征在于,所述锚固足单元与支撑足单元的结构相同。
技术总结
本发明涉及机器人技术领域,具体为一种气动式蛇形软体机器人,包括:锚固足单元、支撑足单元、躯体、电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元、供电模块、足支架组件、躯体支架以及球铰支座,本发明的软体机器人采用串联式的模块化设计,通过球铰支座将电磁换向模块、供压模块、换向控制模块、过载保护模块、中央控制单元和供电模块由前至后依次串接于各锚固足、支撑足和躯体之间,组成了串联的模块化结构,串联式设计使各个模块相互独立又相互联系,同时便于添加新功能模块以适应新的工作需求。
技术研发人员:刘晓敏,赵云伟,卫恒,刘政,赵文伟,张维懿
受保护的技术使用者:北华大学
技术研发日:
技术公布日:2024/11/28
- 还没有人留言评论。精彩留言会获得点赞!