一种面向合作目标的仿生对接锁紧装置
本发明涉及一种仿蟹钳的外形结构与闭合原理的面向合作目标的仿生对接锁紧装置,适用于自主移动的空中-地面机器人的协作作业,重复实现稳固锁紧、迅速解锁。
背景技术:
1、近年来,移动机器人在各个领域的应用逐渐成为研究和产业关注的焦点。然而,面对实际任务场景时,单体移动机器人运动能力有限,而移动机器人在协同作业和任务转移过程中往往面临着对接的问题。在此过程中,被对接的机器人属于合作目标,在复杂地形、危险环境或需要紧密协作的任务中,对接机构的误差与效率是十分关键的技术指标。
2、目前传统的对接机构设计往往受限于固定结构,难以应对复杂多变的场景,对接过程中对位姿精度要求极高,任何微小的误差都可能造成捕获失败,增加了系统控制的难度;在加工制造时多采用刚性材料,接触碰撞时容易产生较大的冲击,极易对目标、捕获机构造成伤害;难以实现无伤对接。
技术实现思路
1、为了克服现有的技术缺陷,本发明提出了一种面向合作目标的仿生对接锁紧装置,可以显著提升对接机构的容差能力,缩减对接时间,提高捕获机构负载能力和任务可靠性。
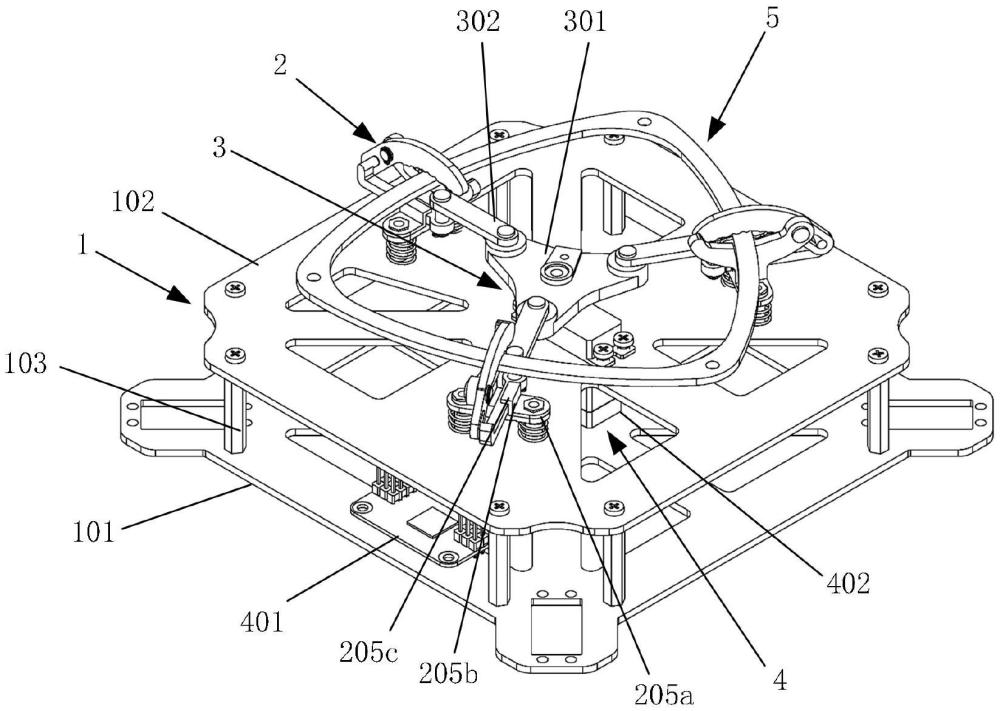
2、本发明面向合作目标的仿生对接锁紧装置,包括主体底座、主体底座上安装的夹持装置、锁止装置、驱动装置,以及与夹持装置配合夹持的对接架。
3、所述夹持装置轴向均布,安装于主体底座顶面;单套夹持装置包括上颚、下颚、滑杆、减震弹簧、卡位件与支撑螺栓。
4、下颚包括上下两个部分,上部为弧形板状结构的下颚颚部,下部为连接座;下颚颚部垂直于主体上板上表面设置,且内弧面向上。下颚颚部外弧面中部与连接座顶面中部相接,通过连接座安装于主体底座顶面;连接座顶面上滑动配合安装有滑杆。滑杆轴线平行于下颚颚部;滑杆末端设计有接头,用于连接上颚。
5、上颚为弧形板状结构,垂直于主体上板设置,且内弧面朝下;上颚末端端部设计有一延伸段,延伸段上沿延伸段设计有滑道;上颚末端端部设计有下颚连接孔。上颚通过下颚连接孔与下颚末端端部通孔配合,通过转轴连接形成转动副,两者开口端朝向主体上板中轴线。同时,上颚的延伸段上的滑道与滑杆末端上的接头间配合套接,形成移动副;上述转轴上安装有扭簧,扭簧处于自由状态下,上颚与下颚间处于解锁打开状态;且滑杆末端连接头位于延伸段上滑道靠近上颚末端一侧。
6、所述锁止装置包括连杆和三角转盘;其中,三角转盘为等腰三角形转盘,平行于主体上板设置。连杆为三条,一端分别通过转轴与三角转盘三角处连接形成转动副,另一端分别与周向布置的三套夹持装置中滑杆前端连接孔间通过转轴连接形成转动副。锁止装置中三角转盘通过驱动装置驱动转动,通过三角转盘单向转动,实现一次上颚与下颚间的解锁与锁紧过程,具体为:
7、舵机驱动三角转盘转动,带动周向均匀分布的三个方向的连杆转动,此时三套夹持装置中滑杆受推力作用向远离主体上板中心方向移动,上颚克服扭簧弹力绕转轴朝向下颚转动,最终实现三套夹持装置同步闭合锁紧;此时,三个方向上的连杆与滑杆间均保持平行,位于奇异位置。当舵机继续带动三角转盘沿当前方向旋转时,执行解锁动作,由三角转盘带动周向均匀分布的三个方向的连杆转动,过程中滑杆受拉力,越过奇异位置,受扭簧扭力作用上颚打开,完成的三套夹持装置的同步解锁。若再次执行锁紧与解锁时,通过舵机换向带动三角转盘反向执行前述过程。
8、所述对接架为圆角三角形框架结构,作为前述三套夹紧装置对接时上鄂、下鄂颚部间锁紧的框架;对接架周向三个角部位置通过连接柱连接被夹持的对接设备。
9、本发明的优点在于:
10、1、本发明面向合作目标的仿生对接锁紧装置,利用一个舵机带动三角转盘做单向的旋转运动,从而带动圆周均布三个方向上的滑杆在滑槽内滑动,实现稳固锁定与迅速解锁,这种驱动的方式大大的简化了控制;在锁定状态下,利用奇异位置的特性,驱动器不需要施加外力,有效降低了能耗,且不会对搭载的移动机器人的正常工作造成额外影响;
11、2、本发明面向合作目标的仿生对接锁紧装置,允许对接架与仿生钩爪之间存在一定的周向、径向误差,为对接姿态提供了很大的容差范围。夹持装置的下颚表面有凸起的硅胶、泡棉,支撑螺栓、减振弹簧作为吸能装置,在对接时吸收对接架的冲击力,这使得夹持装置具有足够的柔顺度,即使换用不同的对接架,或者对接过程中存在冲击,柔性材料可以发生被动形变,实现无伤对接,并减少对接过程中的瞬间冲击影响。
技术特征:
1.一种面向合作目标的仿生对接锁紧装置,其特征在于:包括主体底座、主体底座上安装的夹持装置、锁止装置、驱动装置,以及与夹持装置配合夹持的对接架;
2.如权利要求1所述一种面向合作目标的仿生对接锁紧装置,其特征在于:主体底座包括矩形结构的主体下板与主体上板,两者平行设置,周向四角处通过连接柱连接固定;主体下板周向四角处具有向外侧延伸部分,用于安装移动机器人足部;同时在主体上板周向四角处轴向设计朝向主体上板中心方向的凹进,增大供足部安装的空间。
3.如权利要求1所述一种面向合作目标的仿生对接锁紧装置,其特征在于:连接座与主体上板上表面间设置有减震弹簧;进一步,通过支撑螺栓依次穿过连接座两端开设的通孔、减震弹簧以及主体上板上开设的通孔后,与螺母螺纹配合连接。
4.如权利要求1所述一种面向合作目标的仿生对接锁紧装置,其特征在于:滑杆通过卡位件实现与连接座间的滑动配合;卡位件具有连接面、中间面与卡位面;其中,中间面与连接面垂直设置,底边与连接面前缘相接;卡位面与连接面平行设置,后缘与中间面顶边相接;上述结构的卡位件中连接面与连接座顶面间固定,卡位面、中间面以连接座顶面三者间构成滑槽,滑槽内设置滑杆。
5.如权利要求1所述一种面向合作目标的仿生对接锁紧装置,其特征在于:在对接架锁紧后,上颚以及下颚颚部与对接架间的接触点呈等边三角形。
6.如权利要求1所述一种面向合作目标的仿生对接锁紧装置,其特征在于:下颚颚部侧壁上安装有弧形夹紧板,该夹紧板内弧面与下颚颚部内弧面齐平,并与上颚内弧面上下相对;同时该夹紧板内弧面上以及上颚内弧面上均匀设计有硅胶或泡棉材料凸起,使两者内弧面间构成咬合面增大了对对接架的摩擦力,使对接架在锁紧之后不易滑脱。
7.如权利要求1所述一种面向合作目标的仿生对接锁紧装置,其特征在于:舵机驱动三角转盘单向转动完成一次锁紧与解锁过程具体为:舵机驱动三角转盘转动,带动周向均匀分布的三个方向的连杆转动,此时三套夹持装置中滑杆受推力作用向远离主体上板中心方向移动,上颚克服扭簧弹力绕转轴朝向下颚转动,最终实现三套夹持装置同步闭合锁紧;此时,三个方向上的连杆与滑杆间均保持平行,位于奇异位置;当舵机继续带动三角转盘沿当前方向旋转时,执行解锁动作,由三角转盘带动周向均匀分布的三个方向的连杆转动,过程中滑杆受拉力,越过奇异位置,受扭簧扭力作用上颚打开,完成的三套夹持装置的同步解锁;若再次执行锁紧与解锁时,通过舵机换向带动三角转盘反向执行前述过程。
技术总结
本发明公开一种面向合作目标的仿生对接锁紧装置,主要由夹持装置、锁止装置、驱动装置三个组成部分。其中夹持装置仿蟹钳的外形结构与闭合原理设计,周向均布主体顶面,用于实现对安装与对接设备上的对接架夹持固定。夹持装置的夹持部分分为上下鄂两部分,之间由滑杆相连。锁止装置包括连杆和三角转盘;三角转盘通过连杆连接滑杆;在进行锁紧或解锁时,由舵机驱动三角转盘转动,带动连杆转动,使滑杆受力牵引推动上颚闭合;舵机继续旋转,连杆越过奇异位置完成解锁。本发明适用于自主移动机器人的协作作业,重复实现稳固锁紧、迅速解锁;能够在复杂地形中灵活应用,为具有合作关系的空地机器人的快速组合与分离提供了一种高效可靠的解决方案。
技术研发人员:丁希仑,金雪莹,李嘉宝,董桂宇,徐坤,田耀斌,吕胜男
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2025/1/2
- 还没有人留言评论。精彩留言会获得点赞!