一种液压驱动的变刚度软体抓手
本发明涉及软体抓手,尤其涉及一种液压驱动的变刚度软体抓手。
背景技术:
1、软体抓手由柔软、可变形的材料构成,具有更高的适应性。它可以适应各种形状、大小和表面特性的物体,而不需要设计特定的夹具或爪子,这种适应性使得软体抓手在处理不同物体时更加灵活和通用。软体抓手没有尖锐的边缘或机械件,因此与被抓取的物体接触时减少了物体表面的划痕和损坏。这使得软体抓手对于易碎或表面敏感的物体更加适用。
2、目前存在的变刚度软体抓手基本都是采用气体来进行驱动,通过控制输入气体的气压可以实现该软体手抓取力大小和弯曲程度的控制,采用这种方式会出现抓取力不足的状况;而且目前的抓手都是固定在底座上无法进行不同大小物体的调节,抓取范围较窄。
3、因此,针对以上问题,本发明提出一种液压驱动的变刚度软体抓手,控制简单,抓取力范围大,可以实现手指不同位置的调节。
技术实现思路
1、针对上述问题,本发明通过tpms(三周期极小曲面结构)柔性仿生层、刚性层、充油变刚度层的设计,发明了一种液压驱动的变刚度软体抓手,既有足够的抓取刚度,又能有效的降低手指弯曲的强度,同时保证被抓物体的安全性。
2、本发明采用的技术方案如下:
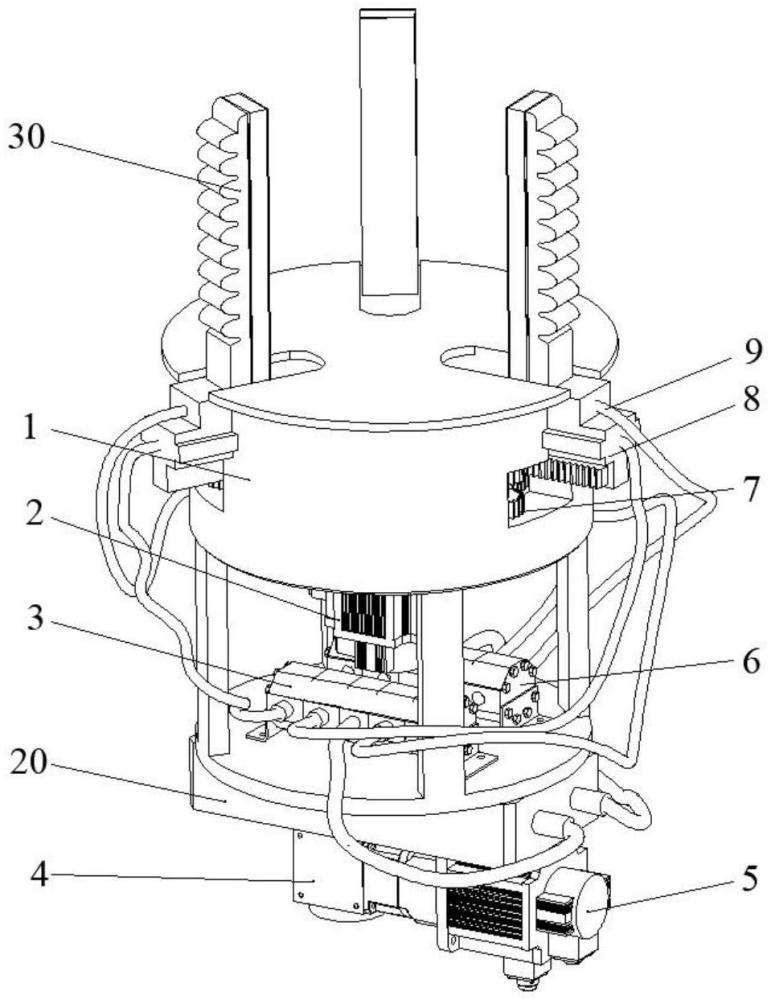
3、本发明所提出的一种液压驱动的变刚度软体抓手,包括柔性手指、固定支座、滑块、齿轮、上油管、下油管、活塞驱动装置、一号分流阀、二号分流阀和电机;所述柔性手指设置在滑块的上端,所述所属齿轮与滑块上齿条啮合,所述活塞驱动装置固定在固定支座的下端,所述上油管一端与滑块相连,另一端与分流阀2相连,所述下油管一端与滑块连接,另一端与分流阀1相连,所述滑块驱动电机与固定支座内的太阳轮连接,所述太阳轮与行星轮啮合,所述行星轮与齿条啮合,所述电机2与活塞驱动装置连接。
4、所述柔性手指包括硅胶外壳、tpms(三周期极小曲面结构)柔性仿生层、刚性层、充油变刚度层,从下至上依次设置在硅胶外壳内部;所述tpms(三周期极小曲面结构)柔性仿生层通过滑块内部油路通道与下油管连接,下油管另一端与分流阀1连接,分流阀与活塞驱动装置连接,活塞驱动装置由电机驱动;
5、所述滑块安装在固定支座的滑槽内,滑块下端与齿条连接,齿条与行星轮啮合,行星轮与太阳轮啮合,太阳轮由电机驱动,电机驱动太阳轮转动带动行星轮转动,行星轮转动带动齿条线性运动,齿条带动滑块线性运动,实现手指不同大小物体的抓取;
6、所述活塞驱动装置包括两活塞、齿轮、齿条、箱体,齿轮与齿条啮合,齿条与活塞连接,活塞与箱体上的活塞筒连接,活塞桶内注油,电机驱动齿轮转动,齿轮带动齿条使固定在齿条上的活塞往复运动,在活塞的推动下完成推油、吸油动作,箱体上有两个油口,油口分别与两个分流阀连接。
7、本发明的有益效果是:
8、1、在固定支座设置了滑动槽,能够使安装在滑块上的手指进行滑动调节;
9、2、电机驱动的太阳轮带动行星轮转动,行星轮带动滑块上的齿条往复运动,实现滑块的稳定滑动;
10、3、活塞驱动装置能够同时实现吸油与充油的动作,充油变刚度层充油时使手指发生弯曲,吸油时使tpms(三周期极小曲面结构)柔性仿生层发生收缩,从而降低了手指的弯曲强度,以便于更稳定抓持;
11、4、手指在抓取物体时,tpms(三周期极小曲面结构)柔性仿生层基于tpms结构变形能力的特性能够更好的贴合物体表面,从而实现物体的仿生抓取。
技术特征:
1.一种液压驱动的变刚度软体抓手,其特征在于:所述软体抓手包括固定支座、滑块、齿轮、油管、活塞驱动装置、一号分流阀、二号分流阀、滑块驱动电机、活塞驱动点击、柔性手指、太阳轮、行星轮、齿条;所述柔性手指设置在滑块的上端,所述所属齿轮与滑块上齿条啮合,所述活塞驱动装置固定在固定支座的下端,所述上油管一端与滑块相连,另一端与分流阀2相连,所述下油管一端与滑块连接,另一端与分流阀1相连,所述滑块驱动电机与固定支座内的太阳轮连接,所述太阳轮与行星轮啮合,所述行星轮与齿条啮合,所述电机2与活塞驱动装置连接;
2.所述活塞驱动装置包括两活塞、齿轮、齿条、导向销轴,齿轮与齿条啮合,齿条一端与活塞连接,另一端与导向销轴连接,电机驱动齿轮转动,齿轮带动齿条使固定在齿条上的活塞往复运动,在活塞的推动下完成推油、吸油动作,箱体上有两个油口,油口分别与一号、二号分流阀连接。
3.根据权利要求1所述的一种液压驱动的变刚度软体抓手,其特征在于:所述内部结构包括tpms(三周期极小曲面结构)柔性仿生层、刚性层、充油变刚度层,每层都不互通。
4.根据权利要求1所述的一种液压驱动的变刚度软体抓手,其特征在于:所述固定支座内安装太阳轮、行星轮、滑块,滑块安装在固定支座的滑槽内,滑块下端与齿条连接,齿条与行星轮啮合,行星轮与太阳轮啮合,太阳轮由电机驱动,电机驱动太阳轮转动带动行星轮转动,行星轮转动带动齿条线性运动,齿条带动滑块线性运动,实现手指不同大小物体的抓取。
5.根据权利要求1所述的一种液压驱动的变刚度软体抓手,其特征在于:所述活塞驱动装置内,齿轮与齿条啮合,齿条与活塞固定连接。
6.根据权利要求1所述的一种液压驱动的变刚度软体抓手,其特征在于:手指内tpms(三周期极小曲面结构)柔性仿生层为primitive(p)结构,由硅胶3d打印而成。该结构具有较大的变形量与回弹力,能够极大限度的与抓取物体表面贴合,实现仿生抓取。
7.根据权利要求1所述的一种液压驱动的变刚度软体抓手,其特征在于:所述手指在活塞驱动装置的作用下抓取充油变刚度层发生膨胀、tpms(三周期极小曲面结构)柔性仿生层发生收缩双重作用。
技术总结
本发明涉及一种液压驱动的变刚度软体抓手,包括柔性手指、固定支座、滑块、齿轮、上油管、下油管、活塞驱动装置、一号分流阀、二号分流阀和电机;所述柔性手指设置在滑块的上端,所述滑块与固定支座滑动连接,所述所属齿轮与滑块上齿条啮合,所述活塞驱动装置固定在固定支座的下端,所述上油管一端与滑块连接,另一端与二号分流阀连接,所述下油管一端与滑块连接,另一端与一号分流阀连接,所述滑块驱动电机与固定支座内的太阳轮连接,所述太阳轮与行星轮啮合,所述行星轮与齿条啮合,所述活塞驱动电机与活塞驱动装置连接;本发明结构简单,能够根据物体的重量来调节抓手的抓取力度,在抓取动作时能够更轻松的弯曲手指,从而实现物体的无损抓持。
技术研发人员:邱娜,郭珈伊,邱祝川
受保护的技术使用者:海南大学
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!