一种视觉定位抓取方法及其系统、装置与流程
本发明涉及物料定位抓取,尤其涉及一种视觉定位抓取方法及其系统、装置。
背景技术:
1、在生产车间中,将物料生产完成后,通常将其打包放在包装盒或纸盒内,然后将其运输到下一条生产线继续后续处理,目前传统的方式通过人工手动搬运,但此过程需要大量重复的操作,大大增加了工作人员劳动强度。
2、在现有技术中,设置电机,电机的主轴固定连接有第一转臂,支架上可转动地连接有第二转臂;第一转臂与电机的主轴垂直设置,第一转臂和第二转臂平行设置;第一转臂的端部以及第二转臂端部分别与一个安装座可转动地连接,该安装座的底部设置有真空吸盘;当检测到纸盒时,电机主轴顺时针转动一定角度,带动真空吸盘下降;真空吸盘吸住纸盒;电机主轴逆时针转动一定角度,带动安装座、吸盘和纸盒整体转移到另一侧,真空吸盘释放纸盒电机主轴顺时针转动一定角度,回到最初的状态,完成一个工作循环;由此能够实现自动地抓取纸盒,并且转移到另一个生产线上,提高了生产效率、降低工人劳动强度。此外,相比于机械臂,提供的纸盒旋转抓取装置结构简单、易于装配和使用,占地面积小,成本极低。
3、但在前述的现有技术中,纸盒通过瓦楞纸制作而成,本身容易发生形变,在纸盒内还打包有物料时,直接通过真空吸盘对纸盒上方吸附并移动时,纸盒受到自身重力影响,同时纸盒自身重量较大的情况下,容易发生形变,影响纸盒输送质量。
技术实现思路
1、本发明的目的在于提供一种视觉定位抓取方法及其系统、装置,解决现有技术中纸盒通过瓦楞纸制作而成,本身容易发生形变,在纸盒内还打包有物料时,直接通过真空吸盘对纸盒上方吸附并移动时,纸盒受到自身重力影响,同时纸盒自身重量较大的情况下,容易发生形变,影响纸盒输送质量的问题。
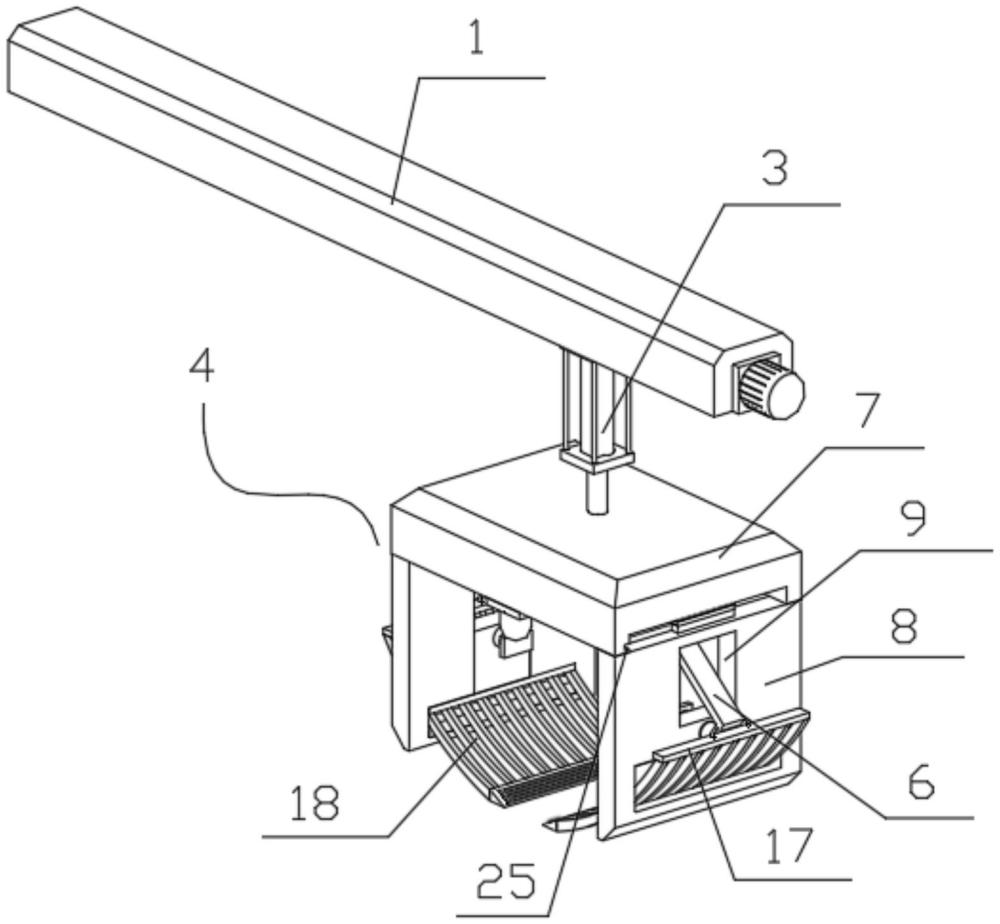
2、为实现上述目的,本发明提供了一种视觉定位抓取装置,包括电动滑轨、滑块、升降气缸、基座、多个工业相机、驱动单元和抓取组件,所述滑块设置于所述电动滑轨上,所述升降气缸设置于所述滑块的下方,所述基座设置于所述升降气缸的输出端,多个所述工业相机依次设置于所述基座上,所述驱动单元设置于所述基座上;
3、所述抓取组件包括两个连杆和两个抓取爪,两个所述连杆的一端均与所述驱动单元连接,两个所述连杆的另一端分别与对应的所述抓取爪转动连接,两个所述抓取爪设置于所述基座上。
4、其中,所述基座包括上壳体和两个固定板,所述上壳体与所述升降气缸的输出端固定连接,两个所述固定板均与所述上壳体固定连接,并对称分布在所述上壳体的两侧,所述固定板具有凹槽,所述连杆位于所述凹槽的内部,所述连杆的另一端贯穿所述凹槽,并与所述抓取爪转动连接,多个所述工业相机依次设置于所述上壳体的下方。
5、其中,所述驱动单元包括电机、两个螺纹杆、连接轴、两个螺纹块、两个上齿条、两个下齿条和两个齿轮,所述电机设置于所述上壳体的内部,两个所述螺纹杆对称设置于所述连接轴的两端,并位于所述上壳体的内部,所述电机的输出端与对应的所述螺纹杆固定连接,两个所述螺纹块分别与对应的所述螺纹杆相互适配,两个所述上齿条分别与对应的所述螺纹块固定连接,两个所述下齿条均与所述上壳体滑动连接,两个所述齿轮分别与对应的所述上齿条和所述下齿条相互啮合,所述齿轮位于所述上齿条和所述下齿条之间,所述连杆的一端与所述下齿条的下方转动连接。
6、其中,所述抓取爪包括支撑板、多个弧形杆、抓取橡胶垫和多个滚轮,所述连杆的另一端贯穿所述凹槽,并于所述支撑板固定连接,所述固定板具有开槽,多个所述弧形杆的一端均与所述支撑板固定连接,多个所述弧形杆的另一端贯穿所述开槽,并与所述抓取橡胶垫固定连接,多个所述滚轮均与所述抓取橡胶垫转动连接。
7、其中,所述抓取组件还包括辅助单元,所述辅助单元包括两个支撑轴、两个支撑滑板和两个橡胶保护套,两个所述支撑轴的一端分别与对应的所述齿轮转动连接,两个所述支撑轴的另一端均与所述上壳体的内侧壁转动连接,两个所述滑板的一端分别与对应的所述下齿条固定连接,所述上壳体具有两个滑槽,两个所述滑板的另一端分别与对应的所述滑槽滑动连接,两个所述橡胶保护套分别设置于对应的所述开槽的内部。
8、其中,所述抓取组件还包括两个推动单元,两个所述推动单元分别设置于对应的所述固定板上;
9、所述推动单元包括推动气缸和推动板,所述推动气缸设置于对应的所述固定板上,所述推动气缸的输出端与所述推动板固定连接。
10、本发明还提供一种视觉定位抓取方法,采用上述所述的视觉定位抓取装置,包括如下步骤:
11、通过所述电动滑轨启动,带动所述滑块移动,使得所述基座移动到纸盒上方;
12、所述工业相机对纸盒进行拍摄,将画面传输到后台进行分析,完成视觉定位;
13、所述驱动单元启动,驱动所述连杆移动,所述连杆带动所述抓取爪伸出;
14、所述抓取橡胶垫插入纸盒下方,同时所述滚轮与纸盒接触,进而整个所述弧形杆移动到纸盒下方,将纸盒抬起,对纸盒形成支撑;
15、所述升降气缸启动,带动纸盒上移,完成抓取动作。
16、本发明还提供一种视觉定位抓取系统,包括上述所述的视觉定位抓取装置,还包括物料进料装置、标签贴标装置、视觉处理装置、后台控制装置和物料出料装置,所述物料进料装置与所述标签贴标装置的一端连接,所述标签贴标装置的另一端与所述视觉处理装置的一端连接,所述视觉处理装置的另一端与所述视觉定位抓取装置连接,所述视觉定位抓取装置的另一端与所述物料出料装置连接,所述物料进料装置、所述标签贴标装置、所述视觉处理装置、所述视觉定位抓取装置和所述物料出料装置均与所述后台控制装置连接。
17、本发明的一种视觉定位抓取方法及其系统、装置,所述工业相机对纸盒进行拍摄,将画面传输到后台进行分析,完成视觉定位;所述驱动单元启动,驱动所述连杆移动,所述连杆带动所述抓取爪伸出,插入纸盒下方,对纸盒下方支撑,完成托起,然后所述升降气缸启动,带动纸盒移动到后续生产设备中,通过上述结构设置,将纸盒抬起,通过对纸盒下方进行支撑,然后将其运输移动,不对一小部分区域进行吸附,避免纸盒内有物料导致重量过重而变形,保证纸盒输送质量,同时通过对纸盒下方进行支撑的方式,相对于传统的夹持和吸附方式,避免了摩擦力不足和吸附力不足导致的掉落,大大提高抓取的稳定性。
技术特征:
1.一种视觉定位抓取装置,包括电动滑轨、滑块、升降气缸、基座、多个工业相机和驱动单元,所述滑块设置于所述电动滑轨上,所述升降气缸设置于所述滑块的下方,所述基座设置于所述升降气缸的输出端,多个所述工业相机依次设置于所述基座上,所述驱动单元设置于所述基座上,其特征在于,
2.如权利要求1所述的视觉定位抓取装置,其特征在于,
3.如权利要求2所述的视觉定位抓取装置,其特征在于,
4.如权利要求3所述的视觉定位抓取装置,其特征在于,
5.如权利要求4所述的视觉定位抓取装置,其特征在于,
6.如权利要求5所述的视觉定位抓取装置,其特征在于,
7.一种视觉定位抓取方法,采用如权利要求6所述的视觉定位抓取装置,其特征在于,包括如下步骤:
8.一种视觉定位抓取系统,包括如权利要求6所述的视觉定位抓取装置,其特征在于,
技术总结
本发明涉及物料定位抓取技术领域,具体涉及一种视觉定位抓取方法及其系统、装置,包括电动滑轨、滑块、升降气缸、基座、多个工业相机、驱动单元和抓取组件;抓取组件包括两个连杆和两个抓取爪,通过所述电动滑轨启动,带动所述滑块移动,使得所述基座移动到纸盒上方;所述工业相机对纸盒进行拍摄,将画面传输到后台进行分析,完成视觉定位;驱动单元启动,驱动连杆移动,连杆带动抓取爪伸出,插入纸盒下方,对纸盒下方支撑,完成托起,然后升降气缸启动,带动纸盒移动到后续生产设备中,由此将纸盒抬起,通过对纸盒下方进行支撑,然后将其运输移动,不对一小部分区域进行吸附,避免纸盒内有物料导致重量过重而变形,保证纸盒输送质量。
技术研发人员:包宏鑫,杨芮欣,石文胜
受保护的技术使用者:内蒙古路巡科技有限公司
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!