一种机械臂及人形机器人的制作方法
本发明涉及机器人,尤其涉及一种机械臂及人形机器人。
背景技术:
1、机械手臂是人形机器人系统中具有代表性的复杂部件,是人形机器人完成抓取作业和人机交互的基础,其结构复杂、重量大。同时,机械手臂的成本高昂。随着人形机器人面向工业领域应用,对人形机器人的机械手臂的轻量化设计、低成本设计提出更高要求。
技术实现思路
1、有鉴于此,本发明的目的是为了克服现有技术中的不足,提供一种机械臂及人形机器人,通过对大臂进行集成化设计,以满足人形机器人的轻量化、低成本需求,进而符合工业领域应用的要求。
2、本发明提供如下技术方案:
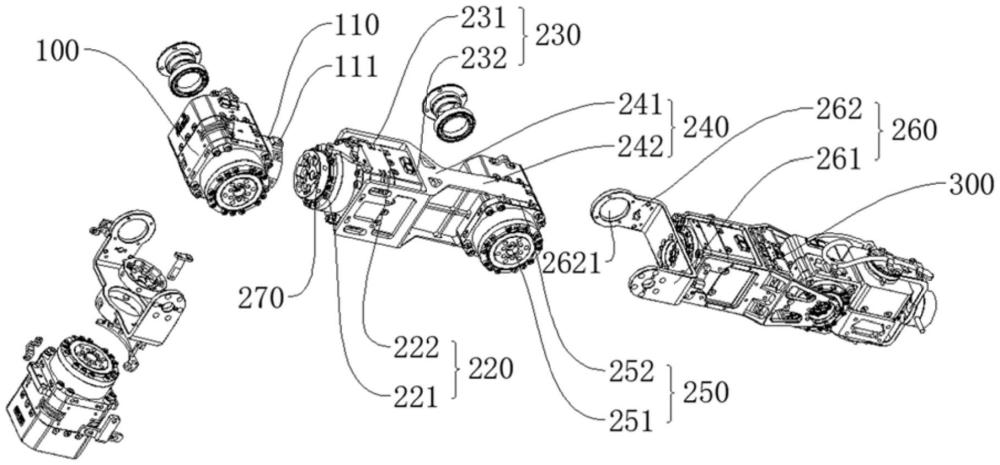
3、第一方面,本申请实施例提供一种机械臂,所述机械臂包括大臂组件,所述大臂组件包括大臂、肩关节电机和肘关节电机,所述大臂具有肘关节端和肩关节端;所述肩关节电机具有第一壳体和第一转轴,所述第一壳体和所述肩关节端连接;所述肘关节电机具有第二壳体和第二转轴,所述第二壳体和所述肘关节端连接;其中,所述第一壳体和第二壳体中至少一个与所述大臂一体化设置。
4、在第一方面的其中一个实施例中,所述第二壳体和所述大臂一体化设置,所述第二转轴的轴线和所述第一转轴的轴线垂直设置,且所述第一转轴的轴线和所述大臂的轴线重合或平行,所述肩关节端设置有第一槽部,所述肩关节电机位于所述第一槽部,所述第一槽部至少具有两个第一槽壁,且所述第一壳体和对应侧的所述第一槽壁连接。
5、在第一方面的其中一个实施例中,所述第一槽部具有第一槽底和两个所述第一槽壁,两个所述第一槽壁相对设置,且所述第一槽底和所述第一壳体抵接,所述第一槽壁和所述第一壳体抵接;
6、所述第一槽底和/或所述第一槽壁设置有减重孔;所述大臂设置有减重槽,且所述大臂还设置有加强筋。
7、在第一方面的其中一个实施例中,所述机械臂还包括肩部组件,所述肩部组件具有肩连接端,所述肩连接端设置有第二槽部,所述第二槽部具有第二槽壁;
8、所述大臂组件还包括:
9、第一转接件,所述第一转接件和所述第一转轴连接,所述第一转接件穿设于所述第二槽部,所述第一转接件和所述第二槽壁连接,且所述第一转接件和所述第二槽部过渡配合或过盈配合。
10、在第一方面的其中一个实施例中,所述大臂组件还包括:
11、第一标零件,所述第一标零件和所述肩关节电机的所述第一壳体连接,所述第一标零件具有第一标零孔;其中,所述肩连接端具有第一标零配孔,所述第一标零配孔位于所述第一标零孔的移动路径上,且在所述第一标零配孔和所述第一标零孔同轴的情况下,所述第一转轴处于零位状态。
12、在第一方面的其中一个实施例中,所述机械臂还包括小臂组件,所述大臂组件还包括第二转接件,所述第二转接件和所述第二转轴连接,且所述第二转接件具有相对设置的第一连接端和第二连接端,所述第一连接端和所述第二转轴连接,所述第二连接端和所述第二壳体转动连接,且所述第二连接端和所述第一连接端同轴转动。
13、在第一方面的其中一个实施例中,所述大臂组件还包括第三转接件,所述第三转接件具有插入端,所述第三转接件背离所述插入端的一端和所述第二连接端连接;其中,所述第二壳体具有第三槽部,所述第三槽部内设置有轴承,所述轴承和所述第三槽部过盈配合,所述轴承和所述第二转轴同轴设置,且所述第二连接端具有安装孔,所述插入端穿设于所述安装孔和所述轴承的内圈,所述插入端和所述轴承的内圈过盈配合,所述第二连接端和所述轴承之间设置有间隙。
14、在第一方面的其中一个实施例中,所述肩部组件还具有限位部,所述肩部组件设置于躯干组件,所述限位部位于所述第一标零件的移动路径上,所述限位部用于限定所述肩关节电机的转动范围,以使所述躯干组件位于所述小臂组件的移动范围之外。
15、在第一方面的其中一个实施例中,所述大臂组件还包括:
16、第二标零件,所述第二标零件和所述第二转接件连接,所述第二标零件具有第二标零孔;其中,所述第二壳体具有第二标零配孔,所述第二标零配孔位于所述第二标零孔的移动路径上,且在所述第二标零配孔和所述第二标零孔同轴的情况下,所述第二转轴处于零位状态。
17、第二方面,本申请还提供一种人形机器人,所述人形机器人包括如上述实施例中任一项所述机械臂。
18、本发明的实施例具有如下优点:
19、采用本发明提供的机械臂,第一壳体和第二壳体中的至少一个与大臂形成了一体化结构。显然,这种设计不仅可以减少机械臂的零部件数量,简化装配流程,降低成本,还能有效降低机械臂的整体重量,从而达到轻量化的目的。此外,一体化设计还有助于提高机械臂的强度和稳定性,确保其在高强度工作环境下依然能够保持良好的性能。
20、本发明还涉及一种人形机器人,由于上述机械臂具有上述技术效果,因此包括该机械臂的人形机器人应当具有相同的技术效果,在此不再赘述。
21、为使本发明的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种机械臂,所述机械臂包括大臂组件,其特征在于,所述大臂组件包括大臂、肩关节电机和肘关节电机,所述大臂具有肘关节端和肩关节端;所述肩关节电机具有第一壳体和第一转轴,所述第一壳体和所述肩关节端连接;所述肘关节电机具有第二壳体和第二转轴,所述第二壳体和所述肘关节端连接;其中,所述第一壳体和所述第二壳体中至少一个与所述大臂一体化设置。
2.根据权利要求1所述的机械臂,其特征在于,所述第二壳体和所述大臂一体化设置,所述第二转轴的轴线和所述第一转轴的轴线垂直设置,且所述第一转轴的轴线和所述大臂的轴线重合或平行,所述肩关节端设置有第一槽部,所述肩关节电机位于所述第一槽部,所述第一槽部至少具有两个第一槽壁,且所述第一壳体和对应侧的所述第一槽壁连接。
3.根据权利要求2所述的机械臂,其特征在于,所述第一槽部具有第一槽底和两个所述第一槽壁,两个所述第一槽壁相对设置,且所述第一槽底和所述第一壳体抵接,所述第一槽壁和所述第一壳体抵接;
4.根据权利要求3所述的机械臂,其特征在于,所述机械臂还包括肩部组件,所述肩部组件具有肩连接端,所述肩连接端设置有第二槽部,所述第二槽部具有第二槽壁;
5.根据权利要求4所述的机械臂,其特征在于,所述大臂组件还包括:
6.根据权利要求5所述的机械臂,其特征在于,所述机械臂还包括小臂组件,所述大臂组件还包括第二转接件,所述第二转接件和所述第二转轴连接,且所述第二转接件具有相对设置的第一连接端和第二连接端,所述第一连接端和所述第二转轴连接,所述第二连接端和所述第二壳体转动连接,且所述第二连接端和所述第一连接端同轴转动。
7.根据权利要求6所述的机械臂,其特征在于,所述大臂组件还包括第三转接件,所述第三转接件具有插入端,所述第三转接件背离所述插入端的一端和所述第二连接端连接;其中,所述第二壳体具有第三槽部,所述第三槽部内设置有轴承,所述轴承和所述第三槽部过盈配合,所述轴承和所述第二转轴同轴设置,且所述第二连接端具有安装孔,所述插入端穿设于所述安装孔和所述轴承的内圈,所述插入端和所述轴承的内圈过盈配合,所述第二连接端和所述轴承之间设置有间隙。
8.根据权利要求6所述的机械臂,其特征在于,所述肩部组件还具有限位部,所述肩部组件设置于躯干组件,所述限位部位于所述第一标零件的移动路径上,所述限位部用于限定所述肩关节电机的转动范围,以使所述躯干组件位于所述小臂组件的移动范围之外。
9.根据权利要求6所述的机械臂,其特征在于,所述大臂组件还包括:
10.一种人形机器人,其特征在于,所述人形机器人包括如权利要求1至9中任一项所述机械臂。
技术总结
本发明提供一种机械臂及人形机器人,涉及机器人技术领域。机械臂包括大臂组件,大臂组件包括大臂、肩关节电机和肘关节电机,大臂具有肘关节端和肩关节端;肩关节电机具有第一壳体和第一转轴,第一壳体和肩关节端连接;肘关节电机具有第二壳体和第二转轴,第二壳体和肘关节端连接;其中,第一壳体和第二壳体中至少一个与大臂一体化设置。本发明提供的机械臂通过对大臂进行集成化设计,以满足人形机器人的轻量化、低成本需求,进而符合工业领域应用的要求。
技术研发人员:刘阳,范文华,杜旭超
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/12/23
- 还没有人留言评论。精彩留言会获得点赞!