一种基于改进超螺旋滑模控制的机械臂轨迹跟踪方法
本发明涉及机械臂轨迹跟踪,具体为一种基于改进超螺旋滑模控制的机械臂轨迹跟踪方法。
背景技术:
1、机械臂轨迹控制主要研究的内容是,通过设计合适的控制方法控制机械臂的运动,使其按照预定的轨迹或路径完成任务。机械臂轨迹控制的主要目标是使机械臂从起始位置精确地到达目标位置,并且沿着预定的轨迹执行运动,保证运动过程中的精度、平滑性以及动态性能。在机器人技术的初期,由于机械臂的任务简单且应用场景较为单一,pid控制因其结构简单、实现容易而广泛应用。pid控制能够在一定程度上满足精度要求,但随着任务的复杂性增加,传统pid控制开始面临精度不足和响应不够迅速的问题,因此研究者开始探索更为先进的控制方法。
2、滑模控制方法由于抗干扰能力强,鲁棒性好,可靠性高,且能较好地解决系统中的非线性问题,已成为目前工程应用中被广泛关注的控制策略。一阶滑模控制器设计参数相对较少、结构简单,因此调参非常方便,已有成熟的控制器设计方案和稳定性分析方法,其在机械臂控制中已被广泛应用。然而,滑模控制的不连续开关特性可能导致系统产生高频抖振,其原因是当系统的状态轨迹趋近滑动模态时,无法准确的按照滑动面移动到平衡点,它的实际运动过程是在滑动面的两侧不断穿越最终到达平衡点,从而使得机械臂系统发生颤动。为了减轻抖振现象,提出了一种基于改进超螺旋滑模控制的机械臂轨迹跟踪控制方法来解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于改进超螺旋滑模控制的机械臂轨迹跟踪方法,解决了上述背景技术中所提出的问题。
3、(二)技术方案
4、本发明为了实现上述目的具体采用以下技术方案:
5、一种基于改进自抗扰的机械臂轨迹跟踪控制方法,包括以下步骤:
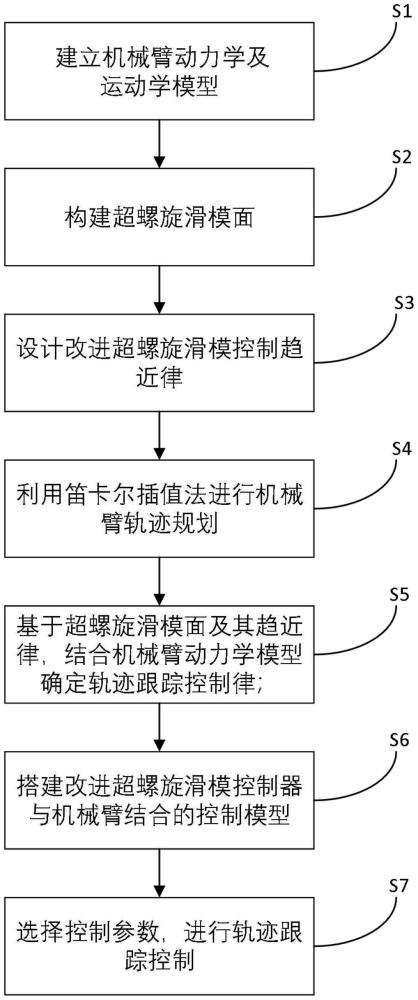
6、s1、根据机械臂相关参数、dh参数法和拉格朗日法构建机械臂动力学模型;
7、s2、以机械臂的动力学系统模型为基础,构建超螺旋滑模面;
8、s3、设计改进超螺旋滑模控制趋近律;
9、s4、利用笛卡尔插值法进行机械臂轨迹规划;
10、s5、基于超螺旋滑模面及其趋近律,结合机械臂动力学模型确定轨迹跟踪控制律;
11、s6、搭建改进超螺旋滑模控制与机械臂结合的控制模型;
12、s7、选择控制参数,进行轨迹跟踪控制。
13、进一步地,所述s1中,对多自由度机械臂做出以下约束:机械臂的所有机械结构都是刚性的;所有机械结构中产生的摩擦力都不加入考虑范围;确定n自由度机器人的构型,得到具体的d-h参数表,通过拉格朗日方法建立动力学模型;
14、
15、其中m(q),c(q,v),g(q),分别表示正定义惯性矩、科里奥利向心力和引力。q,v和a分别代表机械臂关节角位置、角速度和角加速度。τ∈r2是控制输入扭矩。
16、进一步地,所述s2中,构建超螺旋滑模面如下:
17、
18、其中,c是滑模面参数,e是机械臂期望角度与实际角度的误差,是机械臂期望角速度与实际角速度的误差。
19、进一步地,所述s3中,根据权利要求1所述的基于改进超螺旋滑模控制机械臂轨迹跟踪控制方法,其特征在于,为了减轻系统中的抖振现象,在控制律中引入并定义了边界层,提出了一种基于饱和函数sat的滑模控制器。设计改进超螺旋滑模控制趋近律:
20、
21、式中,λ、α为待设计参数,δ为饱和函数的边界层厚度,满足0<δ<1。
22、进一步地,所述s4中在机械臂的笛卡尔空间轨迹规划中,根据机械臂末端执行器在三维空间中从起点到终点过程中的位置和姿态变化,采用插值法进行参数化描述。再通过逆运动学算法将末端执行器在笛卡尔空间中的每个轨迹点映射到机械臂的关节空间,使得机械臂的末端能按照预先规划的轨迹运动。
23、进一步地,所述s5中,基于超螺旋滑模面及其趋近律,结合机械臂动力学模型确定轨迹跟踪控制律如下:
24、
25、其中,q为机械臂实际角速度,为机械臂实际角加速度,为机械臂期望角加速度,为机械臂实际角加速度,为机械臂期望角加速度。
26、进一步地,所述s6中,搭建改进控制律后的超螺旋滑模控制器,在控制对象机械臂上进行轨迹跟踪控制;其中输入期望轨迹位置信息,经过正运动学求逆解转化为期望角度信号,通过改进超螺旋滑模控制器控制,使机械臂能够较好跟踪输入信号,运行期望轨迹。
27、(三)有益效果
28、与现有技术相比,本发明提供了一种基于改进超螺旋滑模控制的机械臂轨迹跟踪控制方法,具备以下有益效果:
29、本发明采用一种新的边界层超螺旋滑模算法与传统滑模算法的不同之处在于新设计的边界层超螺旋滑模算法具有饱和函数的特点。采用饱和函数sat(s)替换传统超螺旋算法中的符号函数sign(s),在实现对机械臂进行较为精准的轨迹跟踪的前提下削弱了传统滑模控制中存在的抖振问题。
技术特征:
1.一种基于改进超螺旋滑模控制的机械臂轨迹跟踪方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于改进超螺旋滑模控制机械臂轨迹跟踪方法,其特征在于,包括:所述s1中,对多自由度机械臂做出以下约束:机械臂的所有机械结构都是刚性的;所有机械结构中产生的摩擦力都不加入考虑范围;确定n自由度机器人的模型,得到具体的d-h参数表,通过拉格朗日方法建立动力学模型;
3.根据权利1要求所述的机械臂轨迹跟踪方法,其特征在于,以机械臂的动力学系统模型为基础,构建超螺旋滑模面,具体包括:
4.根据权利要求1所述的基于改进超螺旋滑模控制机械臂轨迹跟踪方法,其特征在于,在机械臂的笛卡尔空间轨迹规划中,根据机械臂末端执行器在三维空间中从起点到终点过程中的位置和姿态变化,采用插值法进行参数化描述。再通过逆运动学算法将末端执行器在笛卡尔空间中的每个轨迹点映射到机械臂的关节空间,使得机械臂的末端能按照预先规划的轨迹运动。
5.根据权利要求1所述的基于改进超螺旋滑模控制机械臂轨迹跟踪方法,其特征在于,为了减轻系统中的抖振现象,在控制律中引入并定义了边界层,提出了一种基于饱和函数sat的滑模控制器。设计改进超螺旋滑模控制趋近律:
6.根据权利要求1所述的基于改进超螺旋滑模控制机械臂轨迹跟踪方法,其特征在于,基于超螺旋滑模面及其趋近律,结合机械臂动力学模型确定轨迹跟踪控制律如下:
7.根据权利要求1所述的基于改进超螺旋滑模控制机械臂轨迹跟踪方法,其特征为:搭建改进控制律后的超螺旋滑模控制器,在控制对象机械臂上进行轨迹跟踪控制;其中输入期望轨迹位置信息,经过正运动学求逆解转化为期望角度信号,通过改进超螺旋滑模控制器控制,使机械臂能够较好跟踪输入信号,运行期望轨迹。
技术总结
本专利涉及一种基于改进超螺旋滑模控制的机械臂轨迹跟踪控制,属于机械臂轨迹跟踪技术邻域。所述方法包括:S1、根据机械臂相关参数、DH参数法和拉格朗日法构建机械臂动力学模型;S2、以机械臂的动力学系统模型为基础,构建超螺旋滑模面;S3、设计改进超螺旋滑模控制趋近律;S4、利用笛卡尔插值法进行机械臂轨迹规划;S5、基于超螺旋滑模面及其趋近律,结合机械臂动力学模型确定轨迹跟踪控制律;S6、搭建改进超螺旋滑模控制与机械臂结合的控制模型;S7、选择控制参数,进行轨迹跟踪控制。本发明提出的控制器可以在保证系统能够达到状态稳定的前提下,有效抑制抖振,对外界扰动具有较强的鲁棒性,并保证机械臂末端执行器的轨迹跟踪。
技术研发人员:白端元,袁琪玥,李瑞哲,荣冠宇,解文彬,石英杰,张永恒
受保护的技术使用者:长春理工大学
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!