轨道机器人的制作方法
本申请实施例涉及机器人,特别涉及一种轨道机器人。
背景技术:
1、火力发电仍然在电力生产占着较大比例,在火力发电场的发电过程中,需要通过输煤皮带向火电发电机输送煤炭,因此输煤皮带会影响火电发电场的正常运行。
2、输煤皮带轨道机器人通常用于监测输煤皮带的运行,当输煤皮带跑偏、人员攀爬、着火等情况发生时,输煤皮带轨道机器人及时发出预警,防止事故的发生。但是现有的轨道机器人仍然存在一些问题,例如复杂环境适应性差以及维护与保养难度大等缺点。输煤区通常存在高温、高湿、煤尘等恶劣环境条件,对机器人的耐久性和性能提出很高的要求。机器人在恶劣环境下可能会出现故障或性能下降。
技术实现思路
1、本申请实施例的主要目的是提供一种轨道机器人,能够确保机器人在恶劣环境下仍能稳定运行。
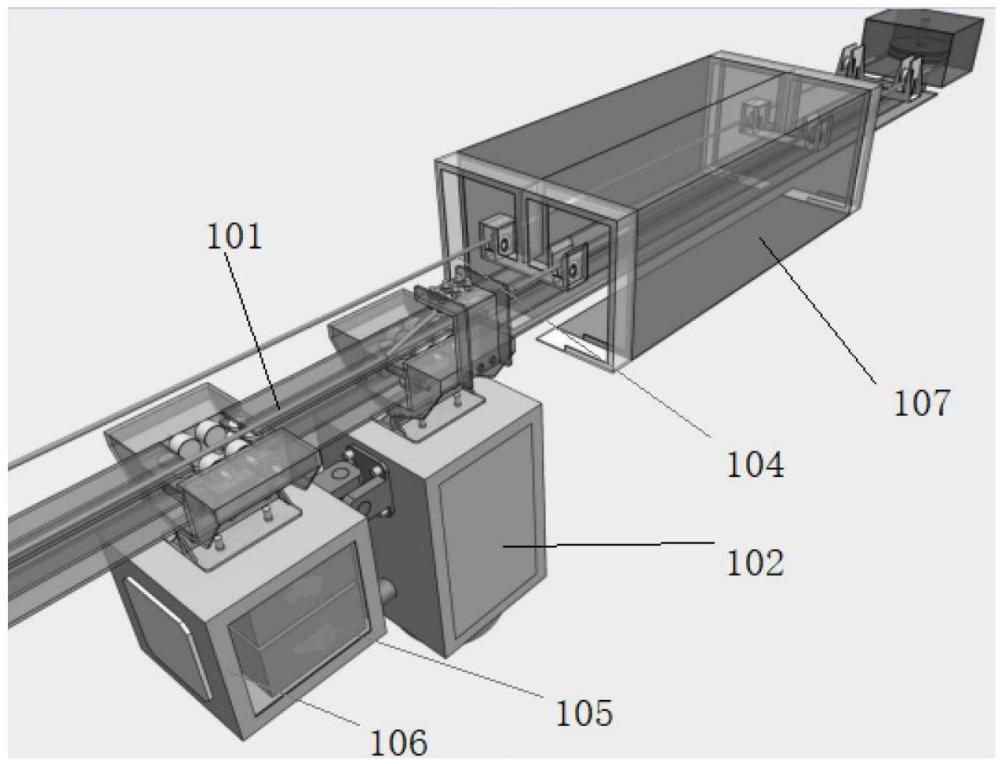
2、为实现上述目的,本申请实施例提出一种轨道机器人,所述轨道机器人包括:
3、轨道,设置在输煤皮带上方;
4、机器人主体,设置在所述轨道下方,并沿着所述轨道滑动,以对所述输煤皮带进行巡检;和
5、电机,通过牵引绳带动所述机器人主体运动。
6、进一步地,所述机器人主体包括摄像头和边缘计算底座,所述摄像头设置在所述边缘计算底座下方,所述边缘计算底座通过分析所述摄像头拍摄的视频,以对所述输煤皮带进行巡检。
7、进一步地,所述摄像头包括可见光摄像头和红外摄像头,所述可见光摄像头的数量为四个,所述四个可见光摄像头环绕设置,所述红外摄像头设置为朝向所述输煤皮带。
8、进一步地,所述机器人主体还包括拾音器,所述拾音器用于收集所述机器人主体下方的声音。
9、进一步地,所述电机为磁编码电机,所述磁编码电机用于定位所述机器人主体在所述轨道上的位置。
10、进一步地,所述机器人主体还包括清洁刷和/或清洁风机,以用于清洁所述轨道。
11、进一步地,还包括滑块,所述滑块与所述机器人主体固定,所述滑块套设于所述滑轨上。
12、进一步地,还包括电池包和电池仓,所述电池包设置在所述电池仓内,所述电池包与所述机器人主体电连接,所述电池仓设置在所述轨道下方并沿着所述轨道滑动,所述电池仓可拆卸地与所述机器人主体连接。
13、进一步地,还包括防尘罩,所述防尘罩设置在所述轨道上,所述防尘罩容纳所述机器人主体。
14、进一步地,还包括电机控制系统,所述电机控制系统与所述电机电连接,以用于控制所述电机拉动所述牵引绳,并控制所述机器人主体的运动。
15、在本申请实施例提供的轨道机器人中,电机通过牵引绳带动机器人主体,该机器人主体能够沿着轨道,在输煤皮带上方来回运动,从而对输煤皮带进行巡检,也就是,本申请实施例提供的轨道机器人通过外部设置的电机提供的牵引动力拖动机器人主体在轨道上滑动,从而能够避免机器人主体电量耗尽而无法返航,确保机器人主体在恶劣环境下仍能稳定运行。
技术特征:
1.一种轨道机器人,其特征在于,所述轨道机器人包括:
2.如权利要求1所述的轨道机器人,其特征在于,所述机器人主体包括摄像头和边缘计算底座,所述摄像头设置在所述边缘计算底座下方,所述边缘计算底座通过分析所述摄像头拍摄的视频,以对所述输煤皮带进行巡检。
3.如权利要求2所述的轨道机器人,其特征在于,所述摄像头包括可见光摄像头和红外摄像头,所述可见光摄像头的数量为四个,所述四个可见光摄像头环绕设置,所述红外摄像头设置为朝向所述输煤皮带。
4.如权利要求3所述的轨道机器人,其特征在于,所述机器人主体还包括拾音器,所述拾音器用于收集所述机器人主体下方的声音。
5.如权利要求4所述的轨道机器人,其特征在于,所述电机为磁编码电机,所述磁编码电机用于定位所述机器人主体在所述轨道上的位置。
6.如权利要求5所述的轨道机器人,其特征在于,所述机器人主体还包括清洁刷和/或清洁风机,以用于清洁所述轨道。
7.如权利要求1所述的轨道机器人,其特征在于,还包括电池包和电池仓,所述电池包设置在所述电池仓内,所述电池包与所述机器人主体电连接,所述电池仓设置在所述轨道下方并沿着所述轨道滑动,所述电池仓可拆卸地与所述机器人主体连接。
8.如权利要求7所述的轨道机器人,其特征在于,还包括充电部,所述充电部设置于所述轨道端部,以用于向所述电池包充电。
9.如权利要求8所述的轨道机器人,其特征在于,还包括防尘罩,所述防尘罩设置在所述轨道上,所述防尘罩容纳所述机器人主体。
10.如权利要求9所述的轨道机器人,其特征在于,还包括电机控制系统,所述电机控制系统与所述电机电连接,以用于控制所述电机拉动所述牵引绳,并控制所述机器人主体的运动。
技术总结
本申请实施例提出一种轨道机器人,所述轨道机器人包括:轨道,设置在输煤皮带上方;机器人主体,设置在所述轨道下方,并沿着所述轨道滑动,以对所述输煤皮带进行巡检;和电机,设置在所述轨道的端部,并通过牵引绳带动所述机器人主体运动。本申请实施例提供的轨道机器人提供一种轨道机器人,能够确保机器人在恶劣环境下仍能稳定运行。
技术研发人员:李志焕,任建国,冯杰,吕彦升,柯世豪
受保护的技术使用者:华润电力技术研究院有限公司
技术研发日:
技术公布日:2025/2/27
- 还没有人留言评论。精彩留言会获得点赞!