腰胯组件及具有该腰胯组件的人形机器人的制作方法
本发明涉及人形机器人,特别是涉及一种腰胯组件及具有该腰胯组件的人形机器人。
背景技术:
1、人形机器人能够模仿人的外形和运动姿态,具有广阔的应用前进。人形机器人一般包括上肢组件,腰胯组件,下肢组件,腰胯组件连接在上肢组件和下肢组件之间。与人体类似,腰胯组件主要用于实现腰部关机和髋关节功能,包括实现弯腰、侧身、腰回转,抬腿,侧摆腿,大腿回转等运动功能。现有技术方案的腰胯组件,通常每个运动功能设置一个执行器来完成,共需要9个执行器,结构复杂,成本高。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的缺点,提供一种腰胯组件及具有该腰胯组件的人形机器人。
2、为了解决以上技术问题,本发明的技术方案如下:
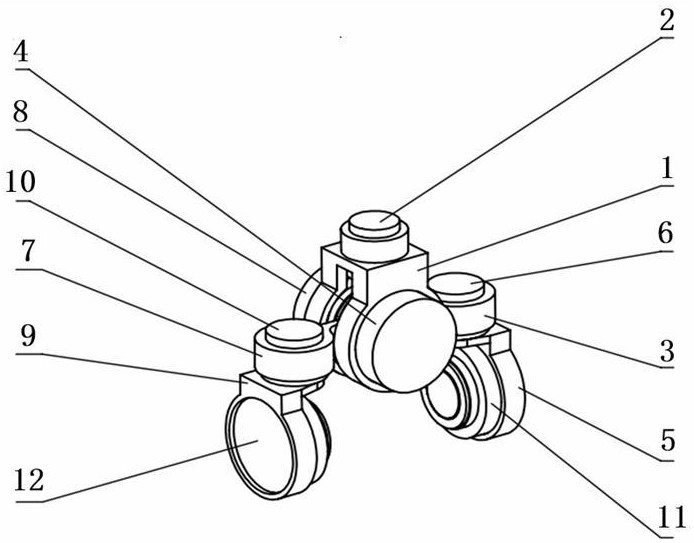
3、一种腰胯组件,包括:
4、腰部平台;
5、腰部回转驱动装置,固定安装在所述腰部平台上,用于驱动机器人上肢组件绕所述腰部平台回转;
6、左侧摆腿驱动组件,包括转动安装在所述腰部平台内的第一回转支架和固定安装在所述腰部平台上且用于带动第一回转支架回转的左侧摆腿驱动装置;
7、左侧转腿驱动组件,包括转动安装在所述第一回转支架上的第二回转支架和固定安装在所述第一回转支架上且用于带动第二回转支架回转的左侧转腿驱动装置;
8、右侧摆腿驱动组件,包括转动安装在所述腰部平台内的第三回转支架和固定安装在所述腰部平台上且用于带动第三回转支架回转的右侧摆腿驱动装置;
9、右侧转腿驱动组件,包括转动安装在所述第三回转支架上的第四回转支架和固定安装在所述第三回转支架上且用于带动第四回转支架回转的右侧转腿驱动装置;
10、左侧抬腿驱动组件,包括固定安装在所述第二回转支架上的左侧抬腿驱动装置,所述左侧抬腿驱动装置与机器人左腿组件驱动连接,用于驱动机器人左腿组件抬起或放下;
11、右侧抬腿驱动组件,包括固定安装在所述第二回转支架上的左侧抬腿驱动装置,所述左侧抬腿驱动装置与机器人左腿组件驱动连接,用于驱动机器人左腿组件抬起或放下。
12、作为本发明所述腰胯组件的一种优选方案,其中:初始状态下,所述第二回转支架和所述第四回转支架的轴线平行于所述腰部回转驱动组件的回转轴线。
13、作为本发明所述腰胯组件的一种优选方案,其中:所述第二回转支架和所述第四回转支架对称设置在所述腰部平台的两侧。
14、作为本发明所述腰胯组件的一种优选方案,其中:所述第一回转支架和第三回转支架的轴线重合,且与所述腰部回转驱动组件的回转轴线垂直且相交。
15、作为本发明所述腰胯组件的一种优选方案,其中:所述左侧抬腿驱动装置的回转轴线与左侧转腿驱动装置的回转轴线垂直且相交,所述右侧抬腿驱动装置的回转轴线与右侧转腿驱动装置的回转轴线垂直且相交。
16、作为本发明所述腰胯组件的一种优选方案,其中:所述腰部回转驱动装置、左侧摆腿驱动装置、左侧转腿驱动装置、左侧抬腿驱动装置、右侧摆腿驱动装置、右侧转腿驱动装置、右侧抬腿驱动装置均为伺服电机。
17、本发明还提供了一种人形机器人,包括如上述任一项所述的腰胯组件。
18、本发明的有益效果是:
19、本发明优化了机器人腰胯部的机构设置,用腿部运动驱动器完成了腰部的运动,减少了整机驱动器的数量,既降低了成本也使整机布置更简洁,外形更美观。
技术特征:
1.一种腰胯组件,其特征在于:包括:
2.根据权利要求1所述的腰胯组件,其特征在于:初始状态下,所述第二回转支架(5)和所述第四回转支架(9)的轴线平行于所述腰部回转驱动组件的回转轴线。
3.根据权利要求1所述的腰胯组件,其特征在于:所述第二回转支架(5)和所述第四回转支架(9)对称设置在所述腰部平台(1)的两侧。
4.根据权利要求1所述的腰胯组件,其特征在于:所述第一回转支架(3)和第三回转支架(7)的轴线重合,且与所述腰部回转驱动组件的回转轴线垂直且相交。
5.根据权利要求1所述的腰胯组件,其特征在于:所述左侧抬腿驱动装置(11)的回转轴线与左侧转腿驱动装置(6)的回转轴线垂直且相交,所述右侧抬腿驱动装置(12)的回转轴线与右侧转腿驱动装置(10)的回转轴线垂直且相交。
6.根据权利要求1所述的腰胯组件,其特征在于:所述腰部回转驱动装置(2)、左侧摆腿驱动装置(4)、左侧转腿驱动装置(6)、左侧抬腿驱动装置(11)、右侧摆腿驱动装置(8)、右侧转腿驱动装置(10)、右侧抬腿驱动装置(12)均为伺服电机。
7.一种人形机器人,其特征在于:包括如权利要求1-6任一项所述的腰胯组件。
技术总结
本发明公开了一种腰胯组件,涉及人形机器人技术领域,包括:腰部平台;腰部回转驱动装置,安装在腰部平台上;左侧摆腿驱动组件,包括转动安装在腰部平台内的第一回转支架和固定安装在腰部平台上的左侧摆腿驱动装置;左侧转腿驱动组件,包括转动安装在第一回转支架上的第二回转支架和固定安装在第一回转支架上的左侧转腿驱动装置;右侧摆腿驱动组件,包括转动安装在腰部平台内的第三回转支架和固定安装在腰部平台上的右侧摆腿驱动装置;右侧转腿驱动组件,包括转动安装在第三回转支架上的第四回转支架和固定安装在第三回转支架上的右侧转腿驱动装置。本发明优化了机器人腰胯部的结构,用腿部运动驱动器完成了腰部的运动,减少了驱动器的数量。
技术研发人员:胡爱军,臧家炜,李远平
受保护的技术使用者:南京埃斯顿酷卓科技有限公司
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!