一种多机器人电梯通行方法以及多机器人跨楼层通行方法与流程
本申请涉及机器人,具体涉及一种多机器人电梯通行方法以及多机器人跨楼层通行方法。
背景技术:
1、随着科技的飞速发展,机器人技术已成为推动社会进步的重要力量,而为了适应人类社会的要求,机器人的通行方式日益多样化。单一楼层行动的机器人已不能满足人们的需求,因此机器人如何通过操作来实现跨越楼层移动,正逐步成为焦点问题。然而,这种多机器人跨楼层移动并执行任务的情况容易发生混乱和碰撞,降低机器人的效率,因此需要对机器人通过电梯进行合理规划,确保高效运行的同时避免机器相互碰撞,以使多个机器人能够有序、快速通过相对应的电梯移动到目的地执行任务成为急需解决的问题。
2、参见cn113104683a的基于多机器人的电梯调度方法及装置,该方法公开了包括:根据接收的呼梯机器人的待梯信息,确定已登梯但未到达目标楼层的机器人未完成的行程经过呼梯机器人所在楼层的所有电梯,即第二电梯集合:根据接收的第一电梯集合和第二电梯集合,计算待调用的第三电梯集合;根据呼梯机器人的待梯信息,确定待梯机器人的行程与呼机器人的行程重合的所有电梯,即第四电梯集合:根据第三电梯集合和第四电梯集合,计算呼梯机器人的可用电梯,从而可以避免呼梯机器人等待的电梯中已经存在乘坐的机器人或者有将要乘坐此电梯的机器人,造成因电梯空间不足而无法登梯的情况,提高呼梯机器人以及电梯的运88h1行效率。虽然以上技术方案可以避免呼梯机器人等待的电梯中已经存在乘坐的机器人或者有将要乘坐此电梯的机器人,造成因电梯空间不足而无法登梯的情况,提高呼梯机器人以及电梯的运行效率。但是存在以下缺点:一是技术复杂度高;该方法涉及大量的数据交互和通信,包括机器人与电梯之间的信息传输、调度系统的数据处理等,涉及复杂的算法和计算过程,需要高精度的数据处理和算法优化,以确保调度的准确性和效率。二是灵活性差;该方法需要预设机器人的行程和目的地等信息,机器人的行程如果发生变化或需要临时调整,调度系统可能需要重新计算和调整。三是通用性差;该方法需要对机器人的行程、目的地等信息进行预设和调度,对机器人的数量、类型和行程规划有一定的要求,通用性差。
技术实现思路
1、鉴于上述问题,本申请提供了一种多机器人电梯通行方法,解决现有多机器人电梯通行方法技术复杂度高、灵活性差以及通用性差的问题。
2、为实现上述目的,发明人提供了一种多机器人电梯通行方法,其包括以下步骤:
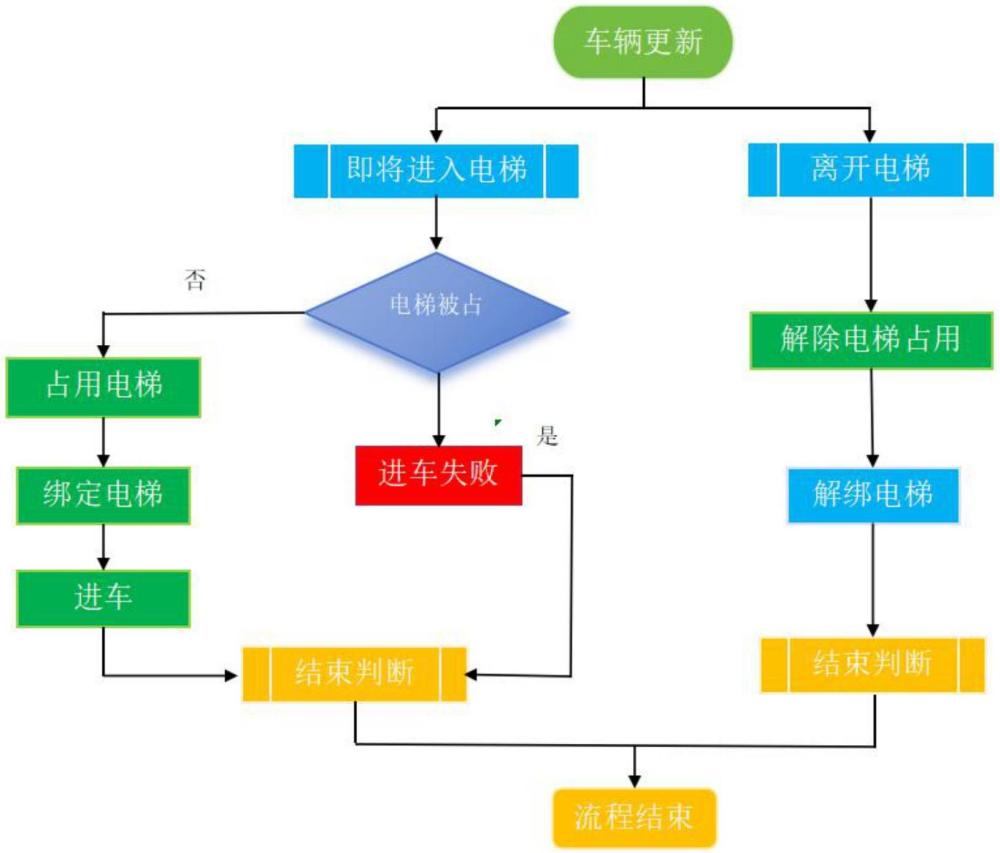
3、判断电梯是否有占位点;
4、若否,则在电梯内设置占位点,并将机器人与所述电梯进行绑定;机器人进入电梯,通过电梯完成跨楼层后,所述机器人离开电梯后,去除所述电梯内的占位点,并将机器人与该电梯进行解绑;
5、若是,则所述机器人在电梯外等待。
6、进一步地,在电梯外设置检测点,所述机器人进入电梯前,在检测点判断当前电梯是否有占位点。
7、进一步地,所述机器人在检测点等待。
8、进一步地,所述判断电梯是否有占位点的步骤,包括以下步骤:
9、确定电梯的长度;
10、定义通行方向,设置电梯门位置的初始值;
11、根据电梯门位置的初始值,计算占位点是否在电梯内。
12、进一步地,所述占位点为半径为1m的区域。
13、一种多机器人电梯通行方法,其包括以下步骤:
14、判断多电梯中是否有电梯没有占位点;
15、若是,则在所述电梯内设置占位点,并将机器人与所述电梯进行绑定;机器人进入电梯,通过电梯完成跨楼层后,所述机器人离开电梯后,去除所述电梯内的占位点,并将机器人与该电梯进行解绑;
16、若否,则所述机器人在电梯外等待。
17、进一步地,在电梯外设置检测点,所述机器人进入电梯前,在检测点判断当前电梯是否有占位点。
18、进一步地,所述判断多电梯中是否有电梯没有占位点的步骤,包括判断每一电梯是否有占位点,具体包括以下步骤:
19、确定电梯的长度;
20、定义通行方向,设置电梯门位置的初始值;
21、根据电梯门位置的初始值,计算占位点是否在电梯内。
22、进一步地,所述占位点为半径为1m的区域。
23、一种多机器人跨楼层通行方法,应用上述的多机器人电梯通行方法,其包括以下步骤:
24、当电梯内和机器人的任务点均无占位点时,在电梯和机器人的任务点分别设置占位点,同时绑定电梯;
25、机器人进入电梯,通过电梯完成跨楼层后,所述机器人离开电梯,去除所述电梯内的占位点,并将机器人与该电梯进行解绑;
26、机器人驶向任务点。
27、区别于现有技术,上述技术方案主要通过在电梯内设置占位点,通过占位点判断电梯是否处于空闲状态,并据此决定机器人是否进入电梯,有效避免了电梯资源的闲置和浪费,当电梯无占位点时,机器人可以设置占位点并绑定电梯,机器人通过绑定电梯从而获取电梯的位置、状态、以及按钮等信息,对电梯进行控制,实现自主乘梯,以完成跨楼层移动;当电梯内有占位点时,机器人在电梯外等待,避免了因盲目进入而造成的电梯内部拥挤,甚至多机器人发生碰撞,以造成不必要的等待时间;确保了电梯资源的合理分配和使用,提高了多机器人电梯通行效率。该方法易于实现,不需要与电梯系统或其他设备进行复杂的数据交互,且不依赖于机器人的数量或类型,因此适用于各种规模的电梯系统和不同的应用场景。
28、上述
技术实现要素:
相关记载仅是本申请技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本申请的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本申请的上述目的及其它目的、特征和优点能够更易于理解,以下结合本申请的具体实施方式及附图进行说明。
技术特征:
1.一种多机器人电梯通行方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的多机器人电梯通行方法,其特征在于,在电梯外设置检测点,所述机器人进入电梯前,在检测点判断当前电梯是否有占位点。
3.根据权利要求2所述的多机器人电梯通行方法,其特征在于,所述机器人在检测点等待。
4.根据权利要求1所述的多机器人电梯通行方法,其特征在于,所述判断电梯是否有占位点的步骤,包括以下步骤:
5.根据权利要求1所述的多机器人电梯通行方法,其特征在于,所述占位点为半径为1m的区域。
6.一种多机器人电梯通行方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的多机器人电梯通行方法,其特征在于,在电梯外设置检测点,所述机器人进入电梯前,在检测点判断当前电梯是否有占位点。
8.根据权利要求6所述的多机器人电梯通行方法,其特征在于,所述判断多电梯中是否有电梯没有占位点的步骤,包括判断每一电梯是否有占位点,具体包括以下步骤:
9.根据权利要求6所述的多机器人电梯通行方法,其特征在于,所述占位点为半径为1m的区域。
10.一种多机器人跨楼层通行方法,应用权利要求1-9任意一项所述的多机器人电梯通行方法,其特征在于,包括以下步骤:
技术总结
一种多机器人电梯通行方法以及多机器人跨楼层通行方法,包括以下步骤:判断电梯是否有占位点;若否,则在电梯内设置占位点,并将机器人与所述电梯进行绑定;机器人进入电梯,通过电梯完成跨楼层后,所述机器人离开电梯后,去除所述电梯内的占位点,并将机器人与该电梯进行解绑;若是,则所述机器人在电梯外等待;以上技术方案有效避免了电梯资源的闲置和浪费,确保了电梯资源的合理分配和使用,提高了多机器人电梯通行效率;该方法易于实现,不需要与电梯系统或其他设备进行复杂的数据交互,且不依赖于机器人的数量或类型,因此适用于各种规模的电梯系统和不同的应用场景。
技术研发人员:柳红凯,陈文强,陈华聪,戴俊源
受保护的技术使用者:福建汉特云智能科技有限公司
技术研发日:
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!