一种用于载具上下料的机械手的制作方法
本发明涉及机械手,尤其涉及一种用于载具上下料的机械手。
背景技术:
1、现如今在工业生产领域通常会使用具有高精度、高速度和可重复性强等优点的工业机器人对载具进行上下料,以便于适应现代工业对生产效率的严格要求,在工业机器人上下料载具时,需要在工业机器人上安装与载具相匹配的机械手,随后工业机器人会通过机械手去抓取载具,并通过机械手上的吸盘将载具抓取和放下,从而对载具进行上下料。
2、由于部分载具表面磨损导致对其上下料的过程中有从吸盘上脱落的可能,而目前的机械手在对载具进行上下料时不便于对载具底部进行支撑,导致载具在上下料的过程中有掉落的可能,并且由于机械手抓取载具移动的过程中会产生惯性容易导致载具滑动松脱,而目前的机械手在对载具上下料的过程中不便于从多方位对载具进行夹持,导致机械手抓取载具后载具在机械手上不够稳定,从而导致对载具的上下料效果不佳。
技术实现思路
1、为了克服上述缺点,本发明提供一种用于载具上下料的机械手,可以对载具底部进行支撑使得载具在上下料的过程中不易掉落并且能够从多方位对载具进行夹持使得机械手抓取载具后载具在机械手上更为稳定,从而增强对载具的上下料效果。
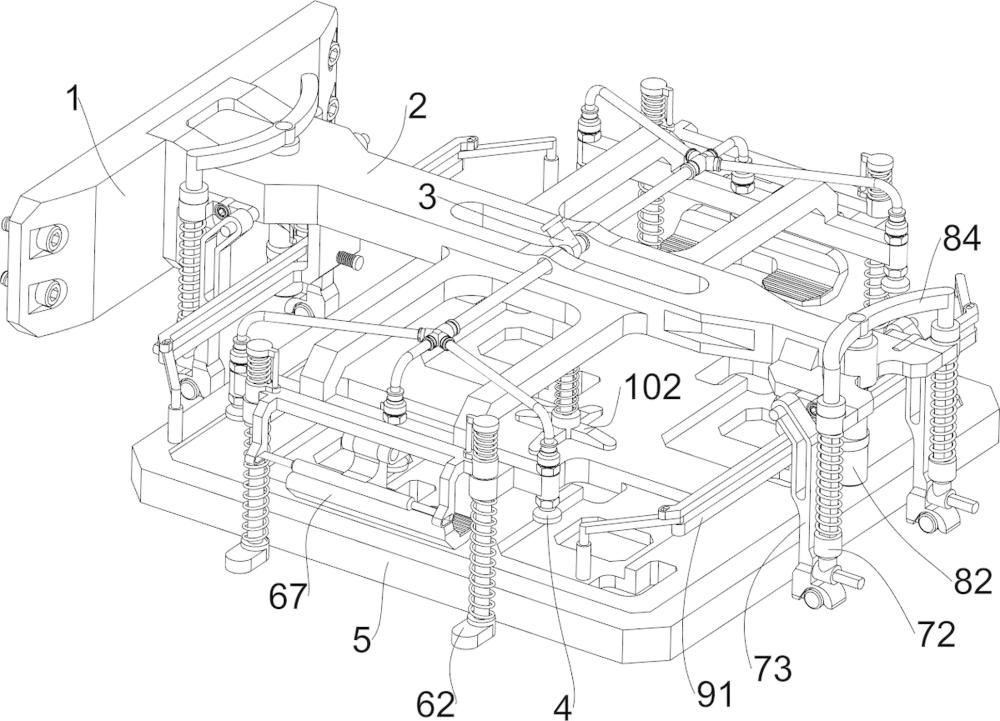
2、技术方案如下:一种用于载具上下料的机械手,包括有连接板,所述连接板上固定连接有机械手,所述机械手的两侧分别均匀连接有三个吸盘,所述机械手每侧的三个所述吸盘为一组,所述吸盘共两组,两组所述吸盘呈对称设置,六个所述吸盘之间连接有分流器,所述机械手下方放置有载具,所述机械手上设有用于托住所述载具底部的托底机构,所述机械手上设有用于定位所述载具的定位机构。
3、进一步的,所述托底机构包括有导套,四个所述导套分别固定连接在所述机械手的两侧,所述机械手每侧的两个所述导套为一组,所述导套共两组,每组的两个所述导套呈对称设置,两组所述导套呈对称设置,四个所述导套上均滑动式连接有接触脚,每组所述导套上的两个所述接触脚为一组,所述接触脚共两组,每组的两个所述接触脚呈对称设置,两组所述接触脚呈对称设置,每组的两个所述接触脚相互靠近的一侧设有杆状结构,四个所述接触脚的下部分别与四个所述导套之间连接有第一压力弹簧,每组的两个所述接触脚之间滑动式连接有升降架,所述升降架的底部两端均开有滑槽,两个所述升降架呈对称设置,每组的两个所述接触脚的杆状结构分别与两个所述升降架顶部接触,每组的两个所述接触脚分别与所述升降架之间连接有第一拉力弹簧,所述机械手的两侧均固定连接有支撑块,两个所述支撑块呈对称设置,两个所述支撑块上均转动式连接有支撑手,两个所述支撑手呈对称设置,两个所述支撑手相互远离的一侧分别与两个所述升降架的滑槽滑动式连接。
4、进一步的,所述定位机构包括有支撑架,四个所述支撑架分别固定连接在所述机械手两端的两侧,同一端的两个所述支撑架为一组,所述支撑架共两组,每组的两个所述支撑架呈对称设置,两组所述支撑架呈对称设置,四个所述支撑架上均滑动式连接有滑杆,同一组所述支撑架上的两个所述滑杆为一组,所述滑杆共两组,每组的两个所述滑杆呈对称设置,两组所述滑杆呈对称设置,四个所述滑杆分别与四个所述支撑架之间连接有第二压力弹簧,四个所述滑杆的底部均滑动式连接有定位架,所述定位架的顶部开有导向槽,四个所述定位架的导向槽分别与四个所述支撑架滑动式连接,同一组所述滑杆上的两个所述定位架为一组,所述定位架共两组,每组的两个所述定位架呈对称设置,两组所述定位架呈对称设置。
5、进一步的,四个所述定位架的底部均转动式连接有滚轮。
6、进一步的,还包括有挤压机构,所述挤压机构设在所述机械手上,所述挤压机构用于挤压所述载具,所述挤压机构包括有旋转管,两个所述旋转管分别转动式连接在所述机械手的两端,所述旋转管上开有螺旋槽,两个所述旋转管呈对称设置,两个所述旋转管的底部均固定连接有偏心轮,两个所述偏心轮呈对称设置,两个所述旋转管内均滑动式连接有导向杆,两个所述导向杆呈对称设置,两个所述导向杆相互靠近的一侧底部设有柱状结构,两个所述导向杆的柱状结构分别与两个所述旋转管的螺旋槽滑动式连接,每组的两个所述滑杆之间均固定连接有连接架,两个所述连接架呈对称设置,两个所述连接架的中部分别与两个所述导向杆的顶部固定连接。
7、进一步的,所述偏心轮为尼龙材质。
8、进一步的,还包括有夹持机构,所述夹持机构设在所述机械手上,所述夹持机构用于稳定所述载具,所述夹持机构包括有稳定架,两个所述稳定架分别固定连接在所述机械手的底部两端,两个所述稳定架呈对称设置,两个所述稳定架的中部均滑动式连接有滑动架,所述滑动架的两端均开有滑动槽,两个所述滑动架呈对称设置,两个所述偏心轮的顶部均固定连接有凸轮,两个所述凸轮呈对称设置,两个所述凸轮分别与两个所述滑动架相互远离的一侧接触,两个所述滑动架相互靠近的一端分别与两个所述稳定架相互靠近的一侧之间连接有第二拉力弹簧,两个所述第二拉力弹簧呈对称设置,两个所述稳定架的两端均转动式连接有夹持臂,同一个所述稳定架上的两个所述夹持臂为一组,所述夹持臂共两组,每组的两个所述夹持臂呈对称设置,两组所述夹持臂呈对称设置,每组的两个所述夹持臂的顶部分别与每个所述滑动架两端的滑动槽滑动式连接。
9、进一步的,同一组的两个所述夹持臂相互远离的一端底部为橡胶材质。
10、进一步的,还包括有推离机构,所述推离机构设在所述机械手上,所述推离机构用于从顶部下压所述载具,所述推离机构包括有活塞筒,所述活塞筒固定连接在所述机械手的中部,所述活塞筒的顶部与所述分流器连接,所述活塞筒内滑动式连接有活塞杆,所述活塞杆底部固定连接有支撑脚,所述支撑脚与所述活塞筒之间连接有第三压力弹簧,所述第三压力弹簧套在所述活塞杆上。
11、进一步的,还包括有缓冲垫,两个所述支撑手上分别固定连接有两个所述缓冲垫,同一个所述支撑手上的两个所述缓冲垫为一组,所述缓冲垫共两组,每组的两个所述缓冲垫呈对称设置,两组所述缓冲垫呈对称设置。
12、有益效果是:1、机械手向下移动抓取载具的同时会通过两组定位架推动载具到正中间位置,进而将载具进行定位,进而使得机械手在后续能更好地抓取载具,从而增强对载具的上下料效果,机械手通过吸盘吸附载具后会带动载具、导套和支撑块一起向上移动,机械手抓取载具向上移动后会通过两个支撑手托住载具的底部,进而对载具底部进行支撑,进而使得载具在上下料的过程中不易掉落,从而进一步增强对载具的上下料效果。
13、2、机械手抓取载具后通过两个偏心轮和两组夹持臂抵住载具四侧,进而从多方位对载具进行夹持,进而使得机械手抓取载具后载具在机械手上更为稳定,从而更进一步增强对载具的上下料效果。
14、3、在需要放下载具时通过支撑脚对载具施加向下的压力,进而机械手向上移动时不会因为吸盘的粘滞力带起载具导致载具偏移位置,进而使得机械手在放下载具时更为稳定,从而在再进一步增强对载具的上下料效果。
技术特征:
1.一种用于载具上下料的机械手,其特征在于,包括有连接板(1),所述连接板(1)上固定连接有机械手(2),所述机械手(2)的两侧分别均匀连接有三个吸盘(4),所述机械手(2)每侧的三个所述吸盘(4)为一组,所述吸盘(4)共两组,两组所述吸盘(4)呈对称设置,六个所述吸盘(4)之间连接有分流器(3),所述机械手(2)下方放置有载具(5),所述机械手(2)上设有用于托住所述载具(5)底部的托底机构,所述机械手(2)上设有用于定位所述载具(5)的定位机构。
2.根据权利要求1所述的一种用于载具上下料的机械手,其特征在于,所述托底机构包括有导套(61),四个所述导套(61)分别固定连接在所述机械手(2)的两侧,所述机械手(2)每侧的两个所述导套(61)为一组,所述导套(61)共两组,每组的两个所述导套(61)呈对称设置,两组所述导套(61)呈对称设置,四个所述导套(61)上均滑动式连接有接触脚(62),每组所述导套(61)上的两个所述接触脚(62)为一组,所述接触脚(62)共两组,每组的两个所述接触脚(62)呈对称设置,两组所述接触脚(62)呈对称设置,每组的两个所述接触脚(62)相互靠近的一侧设有杆状结构,四个所述接触脚(62)的下部分别与四个所述导套(61)之间连接有第一压力弹簧(63),每组的两个所述接触脚(62)之间滑动式连接有升降架(65),所述升降架(65)的底部两端均开有滑槽,两个所述升降架(65)呈对称设置,每组的两个所述接触脚(62)的杆状结构分别与两个所述升降架(65)顶部接触,每组的两个所述接触脚(62)分别与所述升降架(65)之间连接有第一拉力弹簧(64),所述机械手(2)的两侧均固定连接有支撑块(66),两个所述支撑块(66)呈对称设置,两个所述支撑块(66)上均转动式连接有支撑手(67),两个所述支撑手(67)呈对称设置,两个所述支撑手(67)相互远离的一侧分别与两个所述升降架(65)的滑槽滑动式连接。
3.根据权利要求2所述的一种用于载具上下料的机械手,其特征在于,所述定位机构包括有支撑架(71),四个所述支撑架(71)分别固定连接在所述机械手(2)两端的两侧,同一端的两个所述支撑架(71)为一组,所述支撑架(71)共两组,每组的两个所述支撑架(71)呈对称设置,两组所述支撑架(71)呈对称设置,四个所述支撑架(71)上均滑动式连接有滑杆(72),同一组所述支撑架(71)上的两个所述滑杆(72)为一组,所述滑杆(72)共两组,每组的两个所述滑杆(72)呈对称设置,两组所述滑杆(72)呈对称设置,四个所述滑杆(72)分别与四个所述支撑架(71)之间连接有第二压力弹簧(75),四个所述滑杆(72)的底部均滑动式连接有定位架(73),所述定位架(73)的顶部开有导向槽,四个所述定位架(73)的导向槽分别与四个所述支撑架(71)滑动式连接,同一组所述滑杆(72)上的两个所述定位架(73)为一组,所述定位架(73)共两组,每组的两个所述定位架(73)呈对称设置,两组所述定位架(73)呈对称设置。
4.根据权利要求3所述的一种用于载具上下料的机械手,其特征在于,四个所述定位架(73)的底部均转动式连接有滚轮(74)。
5.根据权利要求3所述的一种用于载具上下料的机械手,其特征在于,还包括有挤压机构,所述挤压机构设在所述机械手(2)上,所述挤压机构用于挤压所述载具(5),所述挤压机构包括有旋转管(81),两个所述旋转管(81)分别转动式连接在所述机械手(2)的两端,所述旋转管(81)上开有螺旋槽,两个所述旋转管(81)呈对称设置,两个所述旋转管(81)的底部均固定连接有偏心轮(82),两个所述偏心轮(82)呈对称设置,两个所述旋转管(81)内均滑动式连接有导向杆(83),两个所述导向杆(83)呈对称设置,两个所述导向杆(83)相互靠近的一侧底部设有柱状结构,两个所述导向杆(83)的柱状结构分别与两个所述旋转管(81)的螺旋槽滑动式连接,每组的两个所述滑杆(72)之间均固定连接有连接架(84),两个所述连接架(84)呈对称设置,两个所述连接架(84)的中部分别与两个所述导向杆(83)的顶部固定连接。
6.根据权利要求5所述的一种用于载具上下料的机械手,其特征在于,所述偏心轮(82)为尼龙材质。
7.根据权利要求5所述的一种用于载具上下料的机械手,其特征在于,还包括有夹持机构,所述夹持机构设在所述机械手(2)上,所述夹持机构用于稳定所述载具(5),所述夹持机构包括有稳定架(91),两个所述稳定架(91)分别固定连接在所述机械手(2)的底部两端,两个所述稳定架(91)呈对称设置,两个所述稳定架(91)的中部均滑动式连接有滑动架(92),所述滑动架(92)的两端均开有滑动槽,两个所述滑动架(92)呈对称设置,两个所述偏心轮(82)的顶部均固定连接有凸轮(93),两个所述凸轮(93)呈对称设置,两个所述凸轮(93)分别与两个所述滑动架(92)相互远离的一侧接触,两个所述滑动架(92)相互靠近的一端分别与两个所述稳定架(91)相互靠近的一侧之间连接有第二拉力弹簧(94),两个所述第二拉力弹簧(94)呈对称设置,两个所述稳定架(91)的两端均转动式连接有夹持臂(95),同一个所述稳定架(91)上的两个所述夹持臂(95)为一组,所述夹持臂(95)共两组,每组的两个所述夹持臂(95)呈对称设置,两组所述夹持臂(95)呈对称设置,每组的两个所述夹持臂(95)的顶部分别与每个所述滑动架(92)两端的滑动槽滑动式连接。
8.根据权利要求7所述的一种用于载具上下料的机械手,其特征在于,同一组的两个所述夹持臂(95)相互远离的一端底部为橡胶材质。
9.根据权利要求7所述的一种用于载具上下料的机械手,其特征在于,还包括有推离机构,所述推离机构设在所述机械手(2)上,所述推离机构用于从顶部下压所述载具(5),所述推离机构包括有活塞筒(101),所述活塞筒(101)固定连接在所述机械手(2)的中部,所述活塞筒(101)的顶部与所述分流器(3)连接,所述活塞筒(101)内滑动式连接有活塞杆(103),所述活塞杆(103)底部固定连接有支撑脚(102),所述支撑脚(102)与所述活塞筒(101)之间连接有第三压力弹簧(104),所述第三压力弹簧(104)套在所述活塞杆(103)上。
10.根据权利要求9所述的一种用于载具上下料的机械手,其特征在于,还包括有缓冲垫(11),两个所述支撑手(67)上分别固定连接有两个所述缓冲垫(11),同一个所述支撑手(67)上的两个所述缓冲垫(11)为一组,所述缓冲垫(11)共两组,每组的两个所述缓冲垫(11)呈对称设置,两组所述缓冲垫(11)呈对称设置。
技术总结
本发明涉及机械手技术领域,尤其涉及一种用于载具上下料的机械手。技术问题是目前的机械手在对载具进行上下料时,载具可能掉落,并且不便于从多方位对载具进行夹持,导致上下料不够稳定,从而导致对载具的上下料效果不佳。一种用于载具上下料的机械手,包括有连接板,所述连接板上固定连接有机械手,所述机械手的两侧分别均匀连接有三个吸盘。机械手向下移动抓取载具的同时会通过两组定位架推动载具到正中间位置,进而将载具进行定位,进而使得机械手在后续能更好地抓取载具,机械手抓取载具向上移动后会通过两个支撑手托住载具的底部,进而对载具底部进行支撑,进而使得载具在上下料的过程中不易掉落,从而进一步增强对载具的上下料效果。
技术研发人员:朱达祥,赖顺华
受保护的技术使用者:昆山捷翔工业设备有限公司
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!