一种自适应的仿生机械手臂含有其的机器人
本发明涉及机械手臂领域,具体指有一种自适应的仿生机械手臂含有其的机器人。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手臂通常具有手掌、四指、拇指等部件,通过在各个手指设置有牵拉绳,牵拉绳被手指舵机牵拉实现四指及拇指的弯曲或伸直,进而实现仿生机械手臂抓取物品。
2、现有技术中,仿生机械手臂通常只能抓取例如体积较大的物品,例如苹果、杯子、锤子等,对于薄片状的物品,例如纸张等,仿生机械手臂仍然难以实现对其抓取,大多数机械手臂采用的是吸盘结构实现对薄片状物品进行抓取。这是因为,通牵拉绳的一端牵拉于四指或拇指的第一关节的末端,当舵机拉紧牵拉绳时,对应的手指的每个关节均实现弯曲动作,此时食指和拇指的指尖末端相向靠近实现夹持的动作,该状态下,食指和拇指指尖的接触面较小,且刚性强,无法模仿人体拇指和食指的指腹相接触实现的夹持动作,也就无法抓取薄片状的物品。
3、针对上述的现有技术存在的问题设计一种自适应的仿生机械手臂含有其的机器人是本发明研究的目的。
技术实现思路
1、针对上述现有技术存在的问题,本发明在于提供一种自适应的仿生机械手臂含有其的机器人,能够有效解决上述现有技术存在的至少一个问题。
2、本发明的技术方案是:
3、一种自适应的仿生机械手臂,包括:
4、手掌部;
5、设置于所述手掌部的若干手指件和一个拇指件,所述手指件和所述拇指件均包括依次铰接的第一关节、第二关节、第三关节,所述第三关节铰接至所述手掌部;
6、驱动机构,数量为若干,每个手指件或拇指件对应设置一个所述驱动机构,所述驱动机构均包括传动线和舵机,所述传动线从所述舵机引出后穿过所述第三关节、第二关节后固定连接于所述第一关节的末端;
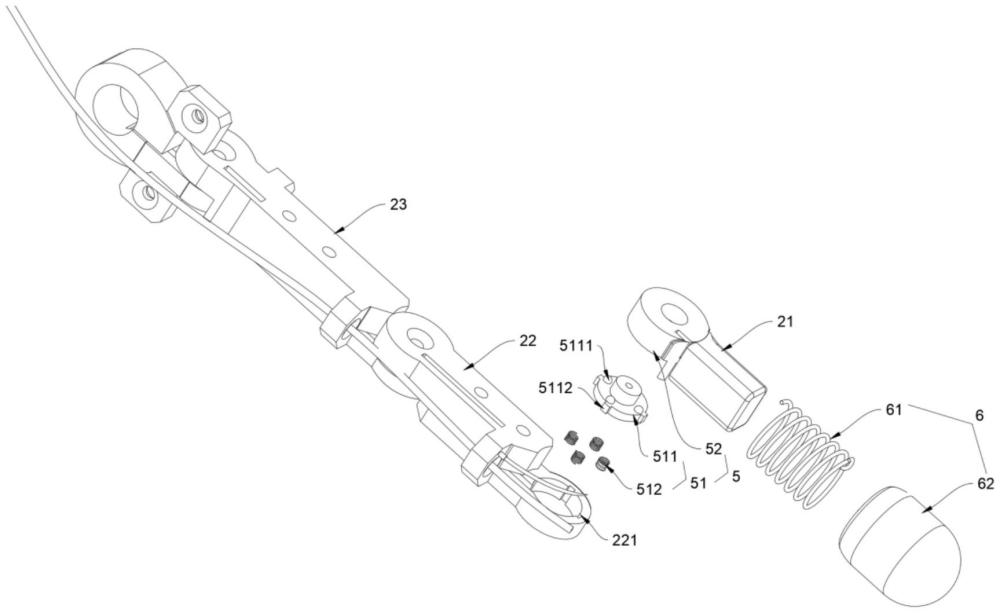
7、关节限位机构,设置于其中一个手指件的第一关节和第二关节之间,所述关节限位机构包括阻挡件,所述阻挡件通过驱动件驱动,所述驱动件驱动所述阻挡件工作后,所述阻挡件限制对应的所述第一关节相对所述第二关节弯曲;
8、表面弹性调节件,设置于设置有所述关节限位机构的手指件的所述第一关节,所述表面弹性调节件的侧面根据所述第一关节和所述第二关节之间的夹角产生抗弯区刚度变化,所述第一关节和所述第二关节之间的夹角越大,所述表面弹性调节件的抗弯区刚度越小。
9、进一步地,所述阻挡件包括设置于所述第二关节的活动座,所述活动座被限制在垂直于所述第一关节和所述第二关节的活动面的方向活动,所述活动座的表面设置有阻挡块,所述驱动件设置于所述第一关节,所述驱动件的表面设置有和所述阻挡块相配合的凹槽,所述驱动件驱动所述活动座朝向所述第一关节活动后,所述阻挡块插入所述凹槽从而限制所述第一关节相对所述第二关节弯曲。
10、进一步地,所述活动座为可磁吸金属材质制成,所述驱动件为电磁铁,所述电磁铁通电后所述活动座被吸附在所述驱动件的表面。
11、进一步地,所述活动座在其边缘设置有导向块,所述第二关节对应所述导向块的位置设置有活动槽,所述导向块于所述活动槽内活动。
12、进一步地,所述第二关节和所述活动座之间设置有第一弹簧,所述第一弹簧使所述活动座具有远离所述第一关节的运动趋势。
13、进一步地,表面弹性调节件包括第二弹簧,所述第二弹簧套设在所述第一关节外围,所述第二弹簧的外圈套设有弹性层,所述第二弹簧的拉伸量与所述第一关节和所述第二关节之间的夹角呈负相关,所述第二弹簧的外圈套设有弹性层,所述弹性层受所述第二弹簧挤压后产生扩张从而改变厚度,所述弹性层的厚度与所述第二弹簧的拉伸量呈正相关。
14、进一步地,包括若干扭簧,所述扭簧设置于所述第一关节和所述第二关节之间、所述第二关节和所述第三关节之间,所述扭簧使所述手指件或所述拇指件具有伸直的运动趋势。
15、进一步地,所述仿生机械手臂夹持薄片状物体时,所述驱动件驱动所述阻挡件工作使对应手指件的所述第一关节和所述第二关节保持平行,相应的所述驱动机构驱动对应的手指件实现第二关节和第三关节、第三关节和手掌部之间产生弯曲,相应的所述驱动机构驱动所述拇指件产生弯曲,并且控制驱动机构的驱动量使所述拇指件的第三关节的末端接触所述手指件的第三关节的侧面。
16、进一步提供一种机器人,包括所述的一种自适应的仿生机械手臂。
17、因此,本发明提供以下的效果和/或优点:
18、本申请第一关节和第二关节可以保持直线状态,形成模拟人手抓取薄片状物品时食指的第二关节和第一关节保持直线状态与拇指相接触,从而改变手指件和拇指件之间的接触面和受力方向,使其更适应于抓取薄片状物品。同时配合表面弹性调节件,使第一关节和第二关节保持直线状态下的表面弹性调节件显得更加柔软、易变形,在第一关节和拇指件接触物品后,表面弹性调节件更容易收到接触物品或拇指件的反作用力从产生对应物品表面的变形,最终使表面弹性调节件贴合到物品的表面。
19、本申请通过表面弹性调节件自适应地根据第一关节和第二关节的弯曲度改变表面弹性,从而在机械手抓取大体积物品使第一关节和第二关节弯曲后表面弹性调节件编的更加坚硬、难变形,从而容易抓取大件物品。
20、本申请通过电磁铁和活动座的配合,具有体积小的特点,从而能够放入第一关节和第二关节之间狭小的空间内,实现对两个关节的控制。
21、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
22、应当明白,本发明的上文的概述和下面的详细说明是示例性和解释性的,并且意在提供对如要求保护的本发明的进一步的解释。
技术特征:
1.一种自适应的仿生机械手臂,其特征在于:包括:
2.根据权利要求1所述的一种自适应的仿生机械手臂,其特征在于:所述阻挡件包括设置于所述第二关节的活动座,所述活动座被限制在垂直于所述第一关节和所述第二关节的活动面的方向活动,所述活动座的表面设置有阻挡块,所述驱动件设置于所述第一关节,所述驱动件的表面设置有和所述阻挡块相配合的凹槽,所述驱动件驱动所述活动座朝向所述第一关节活动后,所述阻挡块插入所述凹槽从而限制所述第一关节相对所述第二关节弯曲。
3.根据权利要求2所述的一种自适应的仿生机械手臂,其特征在于:所述活动座为可磁吸金属材质制成,所述驱动件为电磁铁,所述电磁铁通电后所述活动座被吸附在所述驱动件的表面。
4.根据权利要求2所述的一种自适应的仿生机械手臂,其特征在于:所述活动座在其边缘设置有导向块,所述第二关节对应所述导向块的位置设置有活动槽,所述导向块于所述活动槽内活动。
5.根据权利要求2所述的一种自适应的仿生机械手臂,其特征在于:所述第二关节和所述活动座之间设置有第一弹簧,所述第一弹簧使所述活动座具有远离所述第一关节的运动趋势。
6.根据权利要求1所述的一种自适应的仿生机械手臂,其特征在于:表面弹性调节件包括第二弹簧,所述第二弹簧套设在所述第一关节外围,所述第二弹簧的外圈套设有弹性层,所述第二弹簧的拉伸量与所述第一关节和所述第二关节之间的夹角呈负相关,所述第二弹簧的外圈套设有弹性层,所述弹性层受所述第二弹簧挤压后产生扩张从而改变厚度,所述弹性层的厚度与所述第二弹簧的拉伸量呈正相关。
7.根据权利要求1所述的一种自适应的仿生机械手臂,其特征在于:包括若干扭簧,所述扭簧设置于所述第一关节和所述第二关节之间、所述第二关节和所述第三关节之间,所述扭簧使所述手指件或所述拇指件具有伸直的运动趋势。
8.根据权利要求1所述的一种自适应的仿生机械手臂,其特征在于:所述仿生机械手臂夹持薄片状物体时,所述驱动件驱动所述阻挡件工作使对应手指件的所述第一关节和所述第二关节保持平行,相应的所述驱动机构驱动对应的手指件实现第二关节和第三关节、第三关节和手掌部之间产生弯曲,相应的所述驱动机构驱动所述拇指件产生弯曲,并且控制驱动机构的驱动量使所述拇指件的第三关节的末端接触所述手指件的第三关节的侧面。
9.一种机器人,其特征在于:包括权利要求1-8任意一条所述的一种自适应的仿生机械手臂。
技术总结
本发明涉及一种自适应的仿生机械手臂含有其的机器人,包括:手掌部;手指件包括依次铰接的第一关节、第二关节、第三关节,所述第三关节铰接至所述手掌部;驱动机构,数量为若干,每个手指件或拇指件对应设置一个所述驱动机构,所述驱动机构均包括传动线和舵机;关节限位机构,设置于其中一个手指件的第一关节和第二关节之间,所述关节限位机构包括阻挡件,所述阻挡件通过驱动件驱动,所述驱动件驱动所述阻挡件工作后,所述阻挡件限制对应的所述第一关节相对所述第二关节弯曲;表面弹性调节件,设置于设置有所述关节限位机构的手指件的所述第一关节,所述表面弹性调节件的侧面根据所述第一关节和所述第二关节之间的夹角产生抗弯区刚度变化。
技术研发人员:任刚,王刚,刘天翊骅,杨洁,游世江
受保护的技术使用者:厦门理工学院
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!