机器人控制系统及方法、介质、电子设备及程序产品与流程
本申请涉及机器人控制,具体涉及一种机器人控制系统及方法、介质、电子设备及程序产品。
背景技术:
1、在基于视觉闭环的控制中,机器人首先通过视觉和点云模型感知周围环境,然后进行运动规划,最后执行本体控制。这个过程完成后,机器人会再次进行感知、规划、控制的循环,以实现闭环控制。然而,这种串行执行的方式导致执行时间线性增加,尤其闭环执行时间过长时,会导致机器人的控制出现卡顿,或者由于环境变化速度超过机器人控制系统的执行速度,使得任务无法完成。
技术实现思路
1、有鉴于此,本申请实施例提供了一种机器人控制系统及方法、介质、电子设备及程序产品。
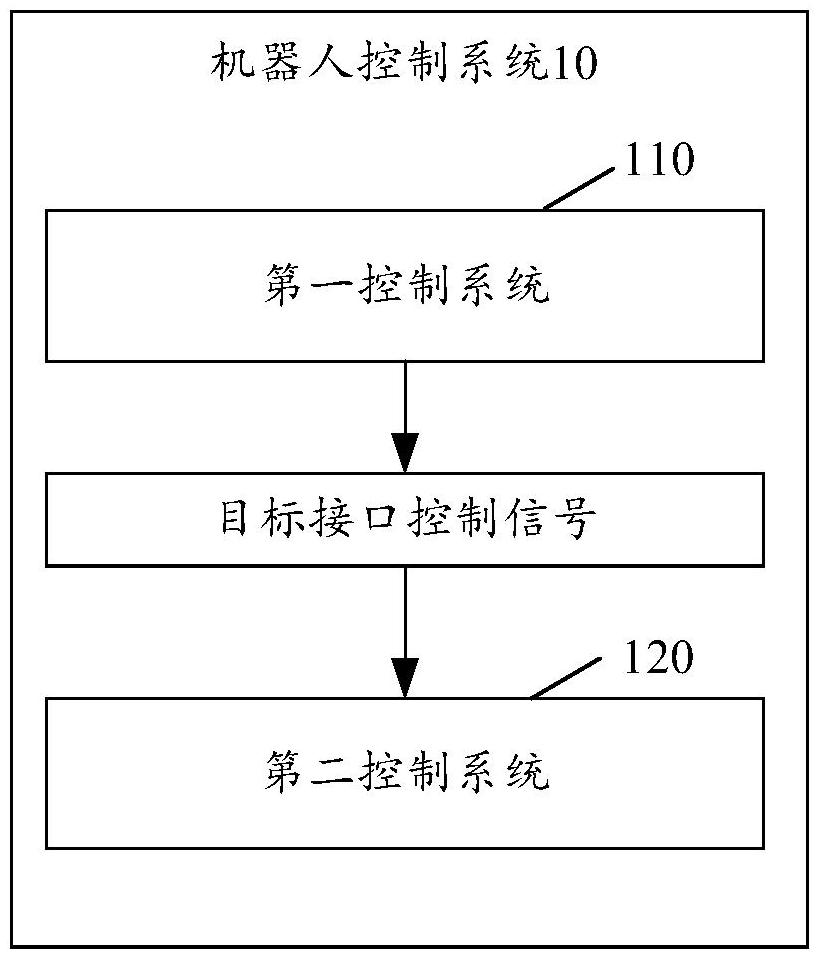
2、第一方面,本申请一实施例提供了一种机器人控制系统,包括:第一控制系统;第二控制系统,级联连接至第一控制系统;第一控制系统被配置为,基于目标任务指令和环境感知数据,生成多个接口控制信号,多个接口控制信号之间的执行顺序具有关联关系;第二控制系统被配置为,获取目标接口控制信号,基于目标接口控制信号和环境感知数据,生成控制指令,以便机器人基于控制指令执行对应的动作。
3、结合第一方面,在第一方面的某些实现方式中,第一控制系统为高阶控制系统,第二控制系统为低阶控制系统;优选地,第一控制系统和第二控制系统相互解耦合。
4、结合第一方面,在第一方面的某些实现方式中,在第一控制系统生成当前接口控制信号之前,和/或,机器人未完成当前接口控制信号对应的、前一个接口控制信号的控制指令对应的动作的情况下,目标接口控制信号为前一个接口控制信号,当前接口控制信号和前一个接口控制信号为多个接口控制信号中的一个;在第一控制系统生成当前接口控制信号之后,以及机器人完成前一个接口控制信号的控制指令对应的动作的情况下,目标接口控制信号为当前接口控制信号。
5、结合第一方面,在第一方面的某些实现方式中,第一控制系统包括:编码模块,被配置为对机器人的当前位姿、目标任务指令和环境感知数据进行初步解析,得到第一目标特征;变换器基础大模型,被配置为对第一目标特征进行优化和增强,得到第二目标特征;解码模块,被配置为处理第二目标特征,生成多个接口控制信号。
6、结合第一方面,在第一方面的某些实现方式中,编码模块包括视觉编码器、语言编码器、音频编码器和传感器数据编码器;视觉编码器用于处理环境感知数据;语言编码器和音频编码器用于处理目标任务指令;传感器数据编码器用于处理机器人的当前位姿;优选地,解码模块包括语言解码器和视觉解码器;语言解码器用于输出接口控制信号中的任务描述;视觉解码器用于输出接口控制信号中的执行目标的识别信息。
7、结合第一方面,在第一方面的某些实现方式中,第二控制系统包括:编码模块,被配置为对机器人的当前位姿、目标接口控制信号和环境感知数据进行初步解析,得到第三目标特征;转换器,被配置为对第三目标特征进行优化和增强,得到第四目标特征,以便基于第四目标特征,输出机器人控制数值,机器人控制数值包括用于指导机器人执行特定动作的参数集合。
8、第二方面,本申请一实施例提供了一种机器人控制方法,应用于第一控制系统,该方法包括:获取环境感知数据;基于目标任务指令和环境感知数据,生成多个接口控制信号,多个接口控制信号之间的执行顺序具有关联关系。
9、结合第二方面,在第二方面的某些实现方式中,第一控制系统为高阶控制系统。
10、结合第二方面,在第二方面的某些实现方式中,第一控制系统包括编码模块、变换器基础大模型和解码模块;基于目标任务指令和环境感知数据,生成多个接口控制信号,包括:编码模块对机器人的当前位姿、目标任务指令和环境感知数据进行初步解析,得到第一目标特征;变换器基础大模型对第一目标特征进行优化和增强,得到第二目标特征;解码模块处理第二目标特征,生成多个接口控制信号。
11、第三方面,本申请一实施例提供了一种机器人控制方法,应用于第二控制系统,该方法包括:获取环境感知数据以及目标接口控制信号,目标接口控制信号为第一控制系统基于目标任务指令和环境感知数据生成的多个接口控制信号中的一个;基于环境感知数据和目标接口控制信号,生成控制指令,以便机器人基于控制指令执行对应的动作。
12、结合第三方面,在第三方面的某些实现方式中,第二控制系统为低阶控制系统,第一控制系统和第二控制系统相互解耦合。
13、结合第三方面,在第三方面的某些实现方式中,第二控制系统包括编码模块和转换器;基于环境感知数据和目标接口控制信号,生成控制指令,包括:编码模块对机器人的当前位姿、目标接口控制信号和环境感知数据进行初步解析,得到第三目标特征;转换器对第三目标特征进行优化和增强,得到第四目标特征,以便基于第四目标特征,输出机器人控制数值,机器人控制数值包括用于指导机器人执行特定动作的参数集合。
14、第四方面,本申请一实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序用于执行第二方面和第三方面所述的机器人控制方法。
15、第五方面,本申请一实施例提供了一种电子设备,该电子设备包括:处理器;用于存储处理器可执行指令的存储器;该处理器用于执行第二方面和第三方面所述的机器人控制方法。
16、第六方面,本申请一实施例提供了一种计算机程序产品,该计算机程序产品包括指令,该指令在电子设备上执行时使电子设备实现第一方面所述的机器人控制方法。
17、在本申请中,机器人控制系统采用级联连接的方式,实现了第一控制系统和第二控制系统的高效协同工作。具体来说,在这种结构中,第一控制系统负责基于目标任务指令和环境感知数据生成执行顺序具有关联关系的多个接口控制信号,而第二控制系统则负责将其中的目标接口控制信号转化为具体的控制指令,以驱动机器人执行相应的动作。由于接口控制信号是独立于第二控制系统生成的,也即,第一控制系统在生成一个接口控制信号后,可以开始生成下一个接口控制信号,而不必等待第二控制系统生成相应的控制指令并执行对应的动作之后再开始。也就是说,第一控制系统和第二控制系统既依赖,又可以并行执行。这种设计显著提高了机器人控制系统的响应速度和执行效率,减少了因等待而产生的时间延迟。此外,这种并行处理机制使得机器人控制系统能够更快地适应环境变化,及时调整控制策略,从而减少了因环境变化速度超过机器人控制系统的执行速度而导致的任务失败风险。
技术特征:
1.一种机器人控制系统,其特征在于,包括:
2.根据权利要求1所述的机器人控制系统,其特征在于,所述第一控制系统为高阶控制系统,所述第二控制系统为低阶控制系统;
3.根据权利要求1所述的机器人控制系统,其特征在于,
4.根据权利要求1至3任一项所述的机器人控制系统,其特征在于,所述第一控制系统包括:
5.根据权利要求4所述的机器人控制系统,其特征在于,所述编码模块包括视觉编码器、语言编码器、音频编码器和传感器数据编码器;
6.根据权利要求1所述的机器人控制系统,其特征在于,所述第二控制系统包括:
7.一种机器人控制方法,其特征在于,应用于第一控制系统,所述方法包括:
8.根据权利要求8所述的机器人控制方法,其特征在于,所述第一控制系统为高阶控制系统。
9.根据权利要求7或8所述的机器人控制方法,其特征在于,所述第一控制系统包括编码模块、变换器基础大模型和解码模块;所述基于目标任务指令和所述环境感知数据,生成多个接口控制信号,包括:
10.一种机器人控制方法,其特征在于,应用于第二控制系统,所述方法包括:
11.根据权利要求10所述的机器人控制方法,其特征在于,所述第二控制系统为低阶控制系统,所述第一控制系统和所述第二控制系统相互解耦合。
12.根据权利要求10或11所述的机器人控制方法,其特征在于,所述第二控制系统包括编码模块和转换器;所述基于所述环境感知数据和所述目标接口控制信号,生成控制指令,包括:
13.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求7至12任一项所述的机器人控制方法。
14.一种电子设备,其特征在于,包括:
15.一种计算机程序产品,其特征在于,所述计算机程序产品包括指令,所述指令在电子设备上执行时使所述电子设备实现权利要求7至12任一项所述的机器人控制方法。
技术总结
本申请提供了一种机器人控制系统及方法、介质、电子设备及程序产品,涉及机器人控制技术领域。该机器人控制系统包括:级联连接的第一控制系统和第二控制系统;其中,第一控制系统被配置为,基于目标任务指令和环境感知数据,生成多个接口控制信号,多个接口控制信号之间的执行顺序具有关联关系;第二控制系统被配置为,获取目标接口控制信号,基于目标接口控制信号和环境感知数据,生成控制指令,以便机器人基于控制指令执行对应的动作。本申请显著提高了机器人控制系统的响应速度和执行效率,减少了因等待而产生的时间延迟。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:上海智元新创技术有限公司
技术研发日:
技术公布日:2025/3/31
- 还没有人留言评论。精彩留言会获得点赞!