一种气动绳驱柔性机械臂
本技术涉及一种气动绳驱柔性机械臂,属于柔性机械臂。
背景技术:
1、机械臂在生产生活中应用的场景越来越多,绳驱机械臂以其可变换角度的灵活性,在很多狭小的工作环境中得以应用,如在地震救援中,可以利用绳驱机械臂,穿过坠落物的缝隙,查看下方的情况,或者将物品从坠落物的缝隙中送到底部。但是,现有的绳驱机械臂都是固定长度的,这样对于超过机械臂长度的深处,就不能很好的起到作用。
技术实现思路
1、为了能够提高机械臂的应用场景,可以适应不同深度的空间使用,提供一种气动绳驱柔性机械臂。采用气动结构,可以实现机械臂整体或者局部的伸长,起到延长或者缩短机械臂的效果
2、本实用新型是通过如下的技术方案,解决上述技术问题:
3、一种气动绳驱柔性机械臂,包括安装底座和安装在底座上的机械臂,所述安装底座是由上底座板、下底座板和多个底座侧板组成的箱体,其特殊之处在于,所述底座侧板的板面上安装绳驱机械组,在箱体内的下底座板板面上安装气动机构;在上底座板上安装机械臂;所述机械臂包括多个伸缩单元;所述伸缩单元包括连接底座,通过十字臂轴连接转动底座,固定在转动底座上的活动套筒,插装在活动套筒内的升降套筒,伸缩筒的外筒固定安装在活动套筒内部的底部,活塞安装在外筒内,活塞的端部与升降套筒的内底固定连接。
4、上述技术方案的优点是:通过活塞在外筒内的滑动,带动升降套筒在活动套筒内伸缩,实现改变机械臂长短的目的。
5、在上述技术方案的基础上,本申请对上述技术方案,做出如下的完善及改进:
6、进一步,所述十字臂轴的中部留有通孔,十字臂轴的一对臂轴转动安装在连接底座的两个轴承座板上;十字臂轴另外一对臂轴转动安装在转动底座底部的一对轴承座板上;转动底座的中部留有通孔;外筒的底部设置有进气管;连接底座的一个轴承座板上设置有通孔;气管一端连接在气动机构的一个气泵上,气管的另一端穿过连接底座、十字臂轴以及转动底座上的通孔与外筒底部的进气管连接。
7、上述的技术特征在本申请中的有益效果是:控制每一节伸缩单元的气管由连接底座上预留的孔洞穿入,再经过连接底座和十字臂轴上的通孔,连接到外筒底部的进气管上,这样,每一节伸缩单元都有自己独立的进气管,并且都具有自己独立的活动空间,通过调气管的长度,可以适应不同环境中的伸缩需求,用于实现机械臂长度的调节。
8、进一步,所述活动套筒的内筒壁上设置有滑动槽,升降套筒的外筒壁上设置有凸楞,凸楞与滑动槽配合;所述滑动槽设置有3条。
9、上述的技术特征在本申请中的有益效果是:滑动槽和凸楞的配合具有导向和限位的作用;避免活动套筒和升降套筒之间发生转动。
10、进一步,所述绳驱机械组包括四个绳驱装置,所述绳驱装置包括电机,安装在电机输出轴上的绳轮,缠绕在绳轮上的驱动绳,驱动绳的端部连接到一个转动底座上。
11、上述的技术特征在本申请中的有益效果是:绳驱装置的电机开关,实现绳轮的转动来收放驱动绳,由驱动绳拉扯其控制的端部的转动底座变换角度,每个转换底座通过四条驱动绳拉扯。
12、进一步,所述绳驱装置还包括一个t型座,t型座的立板上设置有穿绳孔。
13、上述的技术特征在本申请中的有益效果是:t型座上的穿绳孔可以用于实现驱动绳的导向。
14、进一步,所述绳驱装置还包括一个绳保护套管,绳保护套管一端连接在t型座的穿绳孔处,另一端连接在安装在上底座板上的连接底座的绳孔处;驱动绳穿装在绳保护套管内。
15、上述的技术特征在本申请中的有益效果是:绳保护套可以保护驱动绳,避免驱动绳之间的相互纠缠。
16、本申请具有如下的优点:
17、1.气泵机构的气泵通过气管连接到伸缩单元的外筒,利用气动调节,实现伸缩单元的伸缩,达到机械臂伸长缩短的效果,通过气动调节,响应迅速。
18、2.长度无级调节,通过调节气压的大小,控机械臂的长度,可控性更强。
19、3.选用气动调节方式,无污染。
20、4.气动变长度,伸缩单元模块化设计,可根据需要添加气动变长度,增加绳驱柔性机械臂自由度,使绳驱柔性机械臂更好的适应任务需要。
技术特征:
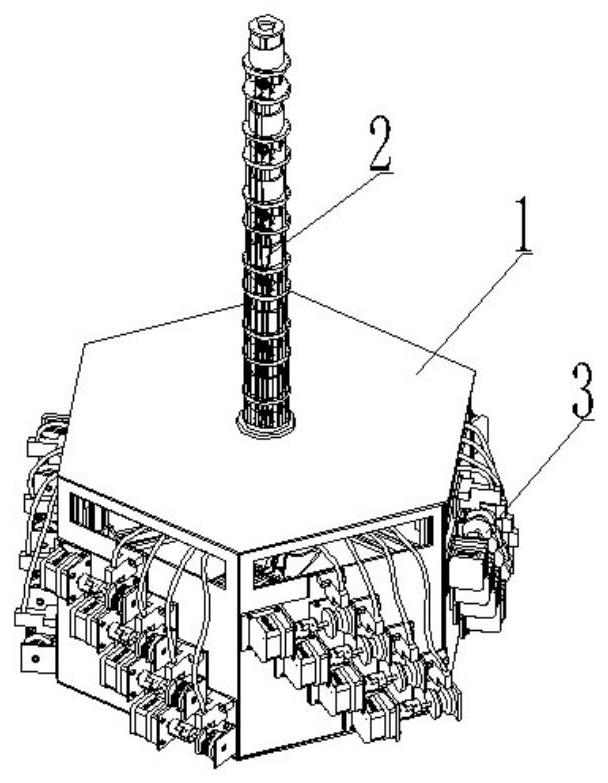
1.一种气动绳驱柔性机械臂,包括安装底座(1)和安装在底座(1)上的机械臂(2),所述安装底座(1)是由上底座板(1.1)、下底座板和多个底座侧板(1.2)组成的箱体,其特征在于,所述底座侧板(1.2)的板面上安装绳驱机械组(3),在箱体内的下底座板板面上安装气动机构(4);在上底座板(1.1)上安装机械臂(2);所述机械臂(2)包括多个伸缩单元;所述伸缩单元包括连接底座(2.1),通过十字臂轴(2.5)连接转动底座(2.2),固定在转动底座(2.2)上的活动套筒(2.3),插装在活动套筒(2.3)内的升降套筒(2.4),伸缩筒的外筒(2.6)固定安装在活动套筒(2.3)内部的底部,活塞(2.7)安装在外筒(2.6)内,活塞(2.7)的端部与升降套筒(2.4)的内底固定连接。
2.根据权利要求1所述的气动绳驱柔性机械臂,其特征在于,所述十字臂轴(2.5)的中部留有通孔,十字臂轴(2.5)的一对臂轴转动安装在连接底座(2.1)的两个轴承座板上;十字臂轴(2.5)另外一对臂轴转动安装在转动底座(2.2)底部的一对轴承座板上;转动底座(2.2)的中部留有通孔;外筒(2.6)的底部设置有进气管;连接底座(2.1)的一个轴承座板上设置有通孔;气管(4.1)一端连接在气动机构(4)的一个气泵上,气管(4.1)的另一端穿过连接底座(2.1)、十字臂轴(2.5)以及转动底座(2.2)上的通孔与外筒(2.6)底部的进气管连接。
3.根据权利要求1或者2所述的气动绳驱柔性机械臂,其特征在于,所述活动套筒(2.3)的内筒壁上设置有滑动槽,升降套筒(2.4)的外筒壁上设置有凸楞,凸楞与滑动槽配合。
4.根据权利要求1所述的气动绳驱柔性机械臂,其特征在于,所述绳驱机械组(3)包括四个绳驱装置,所述绳驱装置包括电机(3.1),安装在电机(3.1)输出轴上的绳轮(3.2),缠绕在绳轮(3.2)上的驱动绳(3.3),驱动绳(3.3)的端部连接到一个转动底座(2.2)上。
5.根据权利要求4所述的气动绳驱柔性机械臂,其特征在于,所述绳驱装置还包括一个t型座(3.4),t型座(3.4)的立板上设置有穿绳孔。
6.根据权利要求5所述的气动绳驱柔性机械臂,其特征在于,所述绳驱装置还包括一个绳保护套管,绳保护套管一端连接在t型座(3.4)的穿绳孔处,另一端连接在安装在上底座板(1.1)上的连接底座(2.1)的绳孔处;驱动绳(3.3)穿装在绳保护套管内。
技术总结
本技术涉及一种气动绳驱柔性机械臂,属于柔性机械臂技术领域。一种气动绳驱柔性机械臂,包括安装底座和安装在底座上的机械臂,所述安装底座是由上底座板、下底座板和多个底座侧板组成的箱体,其特殊之处在于,所述底座侧板的板面上安装绳驱机械组,在箱体内的下底座板板面上安装气动机构;在上底座板上安装机械臂;所述机械臂包括多个伸缩单元;所述伸缩单元包括连接底座,通过十字臂轴连接转动底座,固定在转动底座上的活动套筒,插装在活动套筒内的升降套筒,伸缩筒的外筒固定安装在活动套筒内部的底部,活塞安装在外筒内,活塞的端部与升降套筒的内底固定连接。
技术研发人员:赵梁杰,袁港,张迪,陈义保,柴永生,张龙,王昌辉
受保护的技术使用者:烟台大学
技术研发日:20240108
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!