一种用于农业大棚的多功能机器人的制作方法
本申请属于环境检测,具体为一种用于农业大棚的多功能机器人。
背景技术:
1、随着经济社会的发展和技术的革新,农业的发展也越来越趋向智能化,传统的人工管理存在许多问题:传统的人工管理无法实现对于大棚内的环境状况的精准测量,使得农作物的生长没能达到最佳状态,产量无法得到最大化,且浪费较多的人力资源;传统的人工管理较难实现对于农业的总体监管,对于数据的分析也存在偏差,无法及时的对各个大棚做出相应的处理。
2、公告号为cn206674868u的实用新型公开了一种房建施工卸料平台,包括小车,工作台,杂草、害虫识别摄像装置,集成自动控制装置,电、气驱动装置及设置在工作台上的若干水平气缸和2根平行安置的第一、第二机械臂,第一、第二机械臂的一端与小车的一侧固连,另一端与大棚垂直侧壁上设有的轨道滚动连接,第一、第二机械臂上挂置有若干活动支座,水平气缸的活塞杆与活动支座上端相连,活动支座外侧面上安有垂直气缸,其中,设置在第一机械臂上的活动支座上的垂直气缸活塞杆连有锄草执行装置。
3、在实现本申请过程中,发现该技术有以下问题:在以上专利文件中该装置未设计数据采集分析、自动巡航等模块,会导致无法实时监控和优化种植环境,影响作物生长和产量。
4、为此提出一种用于农业大棚的多功能机器人。
技术实现思路
1、本申请的目的在于:为了解决上述提出的无法实时监控和优化种植环境的问题,本申请提供一种用于农业大棚的多功能机器人。
2、本申请采用的技术方案如下:
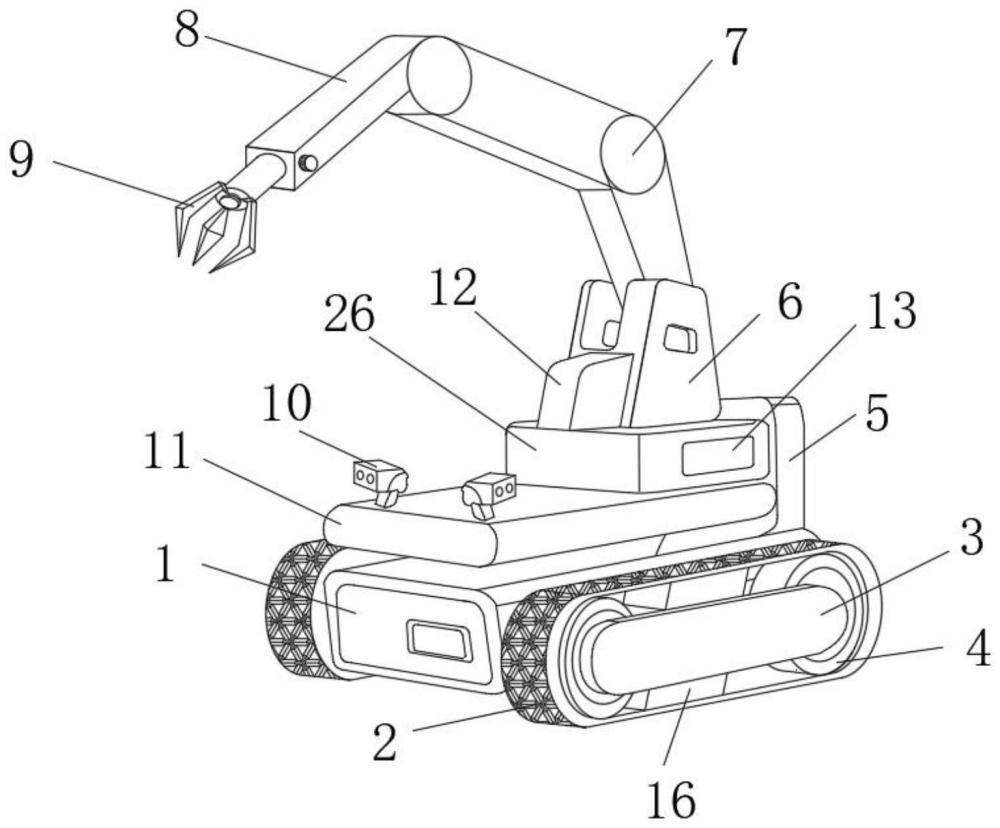
3、一种用于农业大棚的多功能机器人,包括移动平台,所述移动平台两侧固定连接有连接柱,所述连接柱远离所述移动平台一侧外围设置有履带,所述移动平台后侧上表面设置有控制模块和图像识别模块,所述控制模块包含传感器、控制器、执行器、数据传输处理器和存储器,所述控制模块能够接收外界命令并根据预定算法控制所述移动平台的移动,所述图像识别模块可以实时监测判断作物生长情况以及是否遭到虫害,所述控制模块电连接有光伏板跟踪装置;
4、所述移动平台后侧设置有通信接口,所述移动平台内部设置有电源单元,所述移动平台上表面设置有光伏板,所述光伏板后侧上表面设置有固定块,所述固定块上方设置有第一电机室和平移模块,所述平移模块内部设置有机械臂,所述机械臂转动交接处设置有转动轴,所述机械臂具有3个自由度,所述机械臂末端设置有三指夹持器,所述移动平台底部外表面固定连接有传感器模块。
5、通过采用上述技术方案,所述光伏板前侧上表面设置有两组全景摄像机,两组所述全景摄像机与所述图像识别模块进行数据交互。
6、在一优选的实施方式中,全景摄像机用于识别植物位置,植物是否或将要遭受虫害,植物处于何种生长阶段,并用于监控大棚内的情况,通过图像分析和识别,机器人可以检测到异常情况,并及时报警通知操作者,同时机器人中的实时监控会对大棚之中进行图像采集,晚上图像识别模块会进行图像对比,对大棚实时采集的图像数据与大棚的完全关闭的图像进行ai对比分析来检查大棚是否完全关闭,若未完全关闭大棚,机器人会发放预警信息提醒使用者关闭大棚。
7、通过采用上述技术方案,所述通信接口为usb和蓝牙的数据接口,所述固定块两侧外表面设置有用户界面。
8、在一优选的实施方式中,无线通信模块运用zigbee无线通信模块将温湿度、光照等传感器数据采集并传输给大棚管理系统,通信接口为usb和蓝牙的数据接口,用于现场调试和数据导出。
9、通过采用上述技术方案,所述履带内表面设置有传动齿条,所述传动齿条两端内表面均设置有转动齿轮,所述传动齿条内表面与所述转动齿轮外表面相互啮合,两组所述转动齿轮之间设置有限位室,所述传动齿条中部内表面设置有第二电机室。
10、在一优选的实施方式中,电源单元使用锂离子电池,提供机器人的电力,并在机器人顶部安装光伏板,以补充电力,实现能源的可持续利用,履带用于机器人的移动。
11、通过采用上述技术方案,所述平移模块包括滑动底座、螺纹套和丝杆,所述丝杆贯穿所述平移模块前后两侧表面,所述丝杆外围转动连接有所述螺纹套,所述螺纹套上表面设置有所述机械臂。
12、在一优选的实施方式中,机械臂具有3个自由度,包括两个旋转关节和一个,采用三指夹持器作为末端执行器。
13、通过采用上述技术方案,所述平移模块底部内表面设置有所述滑动底座,所述滑动底座内表面与所述螺纹套外表面滑动连接,所述第一电机室内部设置第一电机,且所述丝杆与所述第一电机输出端固定连接。
14、在一优选的实施方式中,移动关节通过第一电机驱动丝杆转动带动机械臂平移,经过二值化、滤波处理、索贝尔边缘处理、形心确定、特征点匹配、三维重建等步骤实现对坏果的空间三维定位,然后将坏果的空间三维坐标等参数传送至下位机,下位机进而通过控制三维滑台和机械臂实现对坏果的抓取和处理工作。
15、通过采用上述技术方案,所述第二电机室内部设置有第二电机,所述第二电机输出端设置有皮带,所述皮带与所述转动齿轮输出轴固定连接。
16、在一优选的实施方式中,第二电机直接控制传动系统,保证正常驱动和行驶。
17、综上所述,由于采用了上述技术方案,本申请的有益效果是:种房建卸料机构
18、本申请中,本实用新型机器人在外壳设计上采用密封设计,确保机器人在潮湿和多尘的环境中正常工作,其移动平台设计为履带式移动,通过启动第二电机使其输出端连接的皮带转动,皮带转动带动其中一组转动齿轮转动,经过传动齿条的传动带动另一组转动齿轮转动,达到在大棚内的土壤表面或轨道上移动的效果,采用集成gps和视觉传感器,实现路径规划和避障;此外,通过启动第一电机带动丝杆转动,从而使用丝杆外围的螺纹套进行平行移动,达到带动机械臂运动的效果,以调整机械臂的作用位置,通过设置全方位光感应器、处理器、方向调节机构,通过传感器模块对温度、湿度、光照等数据的采集并进行数字化处理传至农业大棚数据终端,最终得出当日光照强度与时长对大棚作物的适宜度。
技术特征:
1.一种用于农业大棚的多功能机器人,包括移动平台(1),其特征在于:所述移动平台(1)两侧固定连接有连接柱(23),所述连接柱(23)远离所述移动平台(1)一侧外围设置有履带(2),所述移动平台(1)后侧上表面设置有控制模块(5)和图像识别模块(22),所述控制模块(5)包含传感器、控制器、执行器、数据传输处理器和存储器,所述控制模块(5)能够接收外界命令并根据预定算法控制所述移动平台的移动,所述图像识别模块(22)可以实时监测判断作物生长情况以及是否遭到虫害,所述控制模块(5)电连接有光伏板跟踪装置;
2.如权利要求1所述的一种用于农业大棚的多功能机器人,其特征在于:所述光伏板(11)前侧上表面设置有两组全景摄像机(10),两组所述全景摄像机(10)与所述图像识别模块(22)进行数据交互。
3.如权利要求2所述的一种用于农业大棚的多功能机器人,其特征在于:所述通信接口(24)为usb和蓝牙的数据接口,所述固定块(26)两侧外表面设置有用户界面(13)。
4.如权利要求1所述的一种用于农业大棚的多功能机器人,其特征在于:所述履带(2)内表面设置有传动齿条(17),所述传动齿条(17)两端内表面均设置有转动齿轮(4),所述传动齿条(17)内表面与所述转动齿轮(4)外表面相互啮合,两组所述转动齿轮(4)之间设置有限位室(3),所述传动齿条(17)中部内表面设置有第二电机室(16)。
5.如权利要求1所述的一种用于农业大棚的多功能机器人,其特征在于:所述平移模块(6)包括滑动底座(19)、螺纹套(20)和丝杆(21),所述丝杆(21)贯穿所述平移模块(6)前后两侧表面,所述丝杆(21)外围转动连接有所述螺纹套(20),所述螺纹套(20)上表面设置有所述机械臂(8)。
6.如权利要求5所述的一种用于农业大棚的多功能机器人,其特征在于:所述平移模块(6)底部内表面设置有所述滑动底座(19),所述滑动底座(19)内表面与所述螺纹套(20)外表面滑动连接,所述第一电机室(12)内部设置第一电机(18),且所述丝杆(21)与所述第一电机(18)输出端固定连接。
7.如权利要求4所述的一种用于农业大棚的多功能机器人,其特征在于:所述第二电机室(16)内部设置有第二电机(15),所述第二电机(15)输出端设置有皮带(14),所述皮带(14)与所述转动齿轮(4)输出轴固定连接。
技术总结
本申请涉及环境检测技术领域,公开了一种用于农业大棚的多功能机器人,本申请中,所述移动平台两侧固定连接有连接柱,所述连接柱远离所述移动平台一侧外围设置有履带,所述移动平台后侧上表面设置有控制模块和图像识别模块,所述控制模块包含传感器、控制器、执行器、数据传输处理器和存储器,所述控制模块能够接收外界命令并根据预定算法控制所述移动平台的移动,所述图像识别模块可以实时监测判断作物生长情况以及是否遭到虫害,所述控制模块电连接有光伏板跟踪装置,通过以上结构的配合可以能够实现棚内环境状况的精确把控,节省大量人力物力,使得农业大棚的管理更加智能化。
技术研发人员:代娇娇,杨雨豪,张濠杰,尹纪彬,王雨晨,蔡娇阳
受保护的技术使用者:代娇娇
技术研发日:20240226
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!