机械手和助力设备的制作方法
本技术涉及搬运设备,特别涉及一种机械手和助力设备。
背景技术:
1、助力设备在自动化生产线和物流系统中广泛应用,人工通过操作助力设备来辅助搬运一些重量较大的物品,以此来实现重量较大的物品的搬运。但是现有的助力设备中的在抓取物料的时候方式较为单一,使得被夹取的物料受限,不能够很好适应产线中多样化的产品,并且仅仅通过夹持的方式来对物料进行抓取,灵活性较差。
技术实现思路
1、本实用新型的主要目的是提供一种机械手,旨在解决助力设备抓取方式单一,不能够很好适应产线中多样化的产品的问题。
2、为实现上述目的,本实用新型提出的机械手包括:
3、安装架;
4、第一抓取组件,包括两组夹爪和第一驱动件,两组所述夹爪活动安装于所述安装架,所述第一驱动件固设于所述安装架,所述第一驱动件用以驱动两组所述夹爪相互靠近或远离,以使所述第一抓取组件夹持物料或松开物料;以及
5、第二抓取组件,包括磁吸件,所述磁吸件安装于所述安装架,所述磁吸件用以使所述第二抓取组件磁吸物料。
6、可选地,所述夹爪包括安装杆和夹板,所述夹板固设于所述安装杆的一端,所述安装杆的另一端与所述安装架连接;
7、和/或,所述第一驱动件配置为驱动气缸,所述驱动气缸的数量为两个,两个所述驱动气缸一一对应两组所述夹爪设置。
8、可选地,所述机械手还包括固设于所述安装架的第一滑轨,所述第一滑轨上连接有两组第一滑台,两组所述夹爪一一对应安装于两组所述第一滑台,所述第一驱动件用以驱动两组所述第一滑台相互靠近或远离,以使两组所述夹爪相互靠近或远离。
9、可选地,两组所述夹爪分别为第一夹爪和第二夹爪,所述第一夹爪的数量为两个,所述第二夹爪的数量为一个,所述第二夹爪上的夹板数量为两个,两个所述第一夹爪上的夹板数量至少为一个;
10、所述机械手还包括第一调节件,所述第一调节件安装于其中一组所述第一滑台,所述第一调节件用以调节两所述第一夹爪之间的距离。
11、可选地,所述第一调节件包括第二滑轨、两个第一滑块以及两第一定位件,所述第二滑轨固设于与所述第一夹爪相对应的第一滑台,两个所述第一滑块一一对应固设于两个所述第一夹爪,两所述第一定位件一一对应两所述第一夹爪设置,所述第一定位件用以将所述第一夹爪定位于第一预设位置。
12、可选地,所述机械手还包括第二调节件和第三调节件,所述第二调节件用以调节第一夹爪与所述安装架之间的距离,所述第三调节件用以调节第二夹爪与所述安装架之间的距离。
13、可选地,所述第二调节件包括第二滑块、第三滑轨以及第二定位件,所述第二滑块固设于所述第一滑块,所述第二滑轨固设于所述第一夹爪,所述第二定位件用以将所述第一夹爪定位于第二预设位置;所述第三调节件包括第三滑块、第四滑轨以及第三定位件,所述第三滑块固设于与所述第二夹爪相对应的所述第一滑台,所述第四滑轨固设于所述第二夹爪,所述第三定位件用以将所述第二夹爪定位于第三预设位置。
14、可选地,所述安装架顶部固设有安装管,所述磁吸件的数量为两个,两个所述磁吸件均固设于安装管。
15、可选地,所述磁吸件配置为手动磁吸盘。
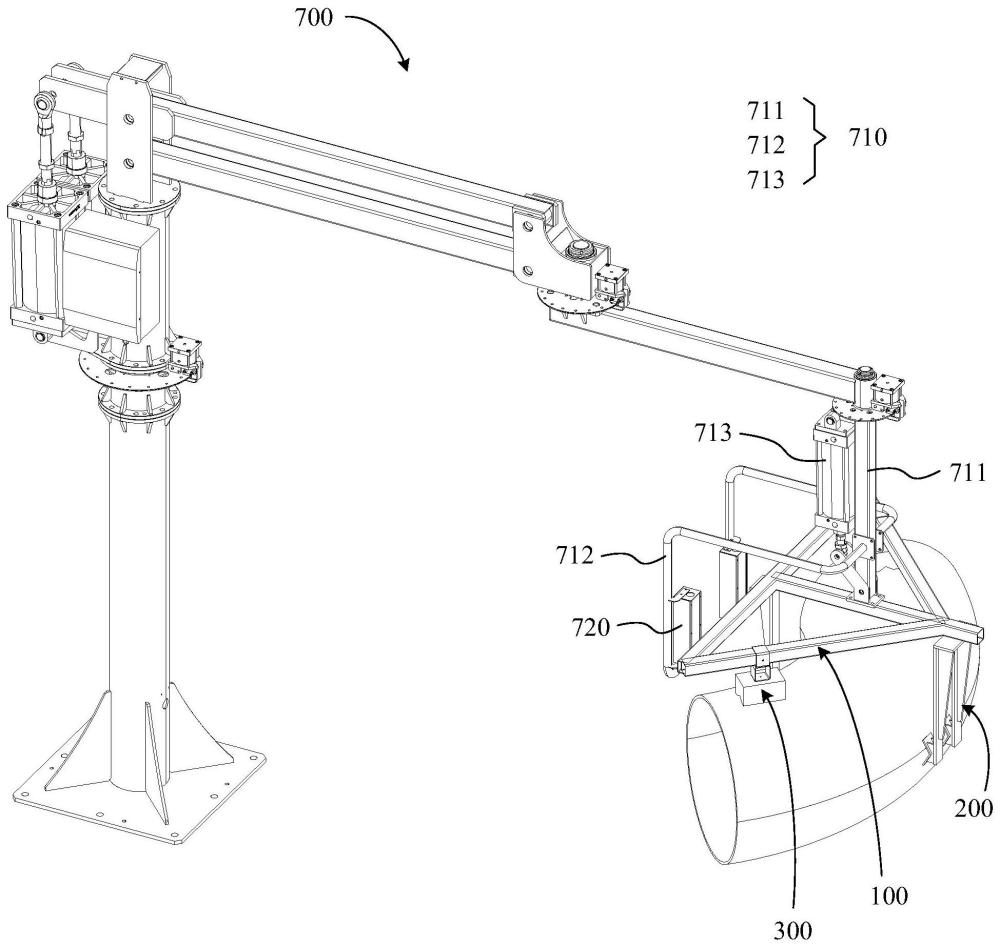
16、本实用新型还提出一种助力设备,包括机械手和助力臂,所述机械手如上任一所述的机械手,所述机械手铰接于助力臂。
17、本实用新型技术方案通过采用第一抓取组件和第二抓取组件,第一抓取组件通过夹持的方式来对物料进行抓取,其物料可以是棒料、管件、袋装物料等结构较大的物料,第二抓取组件通过磁吸的方式来抓取物料,其物料可以是薄壁件、盘装、板状件等厚度较小的金属物料,在第一抓取组件和第二抓取组件的作用下能够使得本申请的机械手对物料抓取的方式多样,并且能够适应产线中多样化的产品,进而解决现有技术中存在的技术问题。
技术特征:
1.一种机械手,其特征在于,包括:
2.如权利要求1所述的机械手,其特征在于,所述夹爪包括安装杆和夹板,所述夹板固设于所述安装杆的一端,所述安装杆的另一端与所述安装架连接;
3.如权利要求1所述的机械手,其特征在于,所述机械手还包括固设于所述安装架的第一滑轨,所述第一滑轨上连接有两组第一滑台,两组所述夹爪一一对应安装于两组所述第一滑台,所述第一驱动件用以驱动两组所述第一滑台相互靠近或远离,以使两组所述夹爪相互靠近或远离。
4.如权利要求3所述的机械手,其特征在于,两组所述夹爪分别为第一夹爪和第二夹爪,所述第一夹爪的数量为两个,所述第二夹爪的数量为一个,所述第二夹爪上的夹板数量为两个,两个所述第一夹爪上的夹板数量至少为一个;
5.如权利要求4所述的机械手,其特征在于,所述第一调节件包括第二滑轨、两个第一滑块以及两第一定位件,所述第二滑轨固设于与所述第一夹爪相对应的第一滑台,两个所述第一滑块一一对应固设于两个所述第一夹爪,两所述第一定位件一一对应两所述第一夹爪设置,所述第一定位件用以将所述第一夹爪定位于第一预设位置。
6.如权利要求5所述的机械手,其特征在于,所述机械手还包括第二调节件和第三调节件,所述第二调节件用以调节第一夹爪与所述安装架之间的距离,所述第三调节件用以调节第二夹爪与所述安装架之间的距离。
7.如权利要求6所述的机械手,其特征在于,所述第二调节件包括第二滑块、第三滑轨以及第二定位件,所述第二滑块固设于所述第一滑块,所述第二滑轨固设于所述第一夹爪,所述第二定位件用以将所述第一夹爪定位于第二预设位置;所述第三调节件包括第三滑块、第四滑轨以及第三定位件,所述第三滑块固设于与所述第二夹爪相对应的所述第一滑台,所述第四滑轨固设于所述第二夹爪,所述第三定位件用以将所述第二夹爪定位于第三预设位置。
8.如权利要求1至7任意一项所述的机械手,其特征在于,所述安装架顶部固设有安装管,所述磁吸件的数量为两个,两个所述磁吸件均固设于安装管。
9.如权利要求8所述的机械手,其特征在于,所述磁吸件配置为手动磁吸盘。
10.一种助力设备,其特征在于,包括机械手和助力臂,所述机械手如权利要求1至9任意一项所述的机械手,所述机械手铰接于助力臂。
技术总结
本技术公开一种机械手和助力设备,其中,机械手包括安装架;第一抓取组件,包括两组夹爪和第一驱动件,两组所述夹爪活动安装于所述安装架,所述第一驱动件固设于所述安装架,所述第一驱动件用以驱动两组所述夹爪相互靠近或远离,以使所述第一抓取组件夹持物料或松开物料;以及第二抓取组件,包括磁吸件,所述磁吸件安装于所述安装架,所述磁吸件用以使所述第二抓取组件磁吸物料。本技术技术方案能够解决助力设备抓取方式单一,不能够很好适应产线中多样化的产品的问题。
技术研发人员:何勇,魏民,刘波,张志恒,张艺才,李鸿斌,赵成良,李长锐,黄金友
受保护的技术使用者:中建三局集团有限公司
技术研发日:20240227
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!