一种力控抓手的制作方法
本技术涉及机械抓手,更具体地说,涉及一种力控抓手。
背景技术:
1、机械臂可以代替人类做重复性、高精度、危险性的工作,提高生产效率和质量,降低工人的劳动强度和安全风险,因此得到广泛应用。机械臂抓手相当于机械臂的手掌部分,是机械臂的末端执行器,包括抓手、吸盘、吸嘴等工具,用于抓取、移动、加工和装配。现有的机械臂抓手或夹具的加持力度不可控,无法根据抓取对象的形状、受力大小调节抓手的夹持力,导致果蔬、精密仪器、易碎品等被抓取对象造成损伤,使机械臂抓手的适用范围受到影响。
技术实现思路
1、本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提出一种力控抓手。
2、本实用新型解决其技术问题所采用的技术方案是:提出一种力控抓手,包括:控制单元、驱动单元和力控单元,所述控制单元用于发送控制信号,所述驱动单元用于接收所述控制信号,并根据接收的控制信号向所述力控单元提供驱动力,所述力控单元在驱动力作用下对目标物进行夹持;
3、所述力控单元包括:力控系统、传动装置和夹持装置,所述夹持装置包括:压力传感器,所述压力传感器设于所述夹持装置的表面。
4、在一些实施例中,所述驱动单元固定连接于基架上,所述驱动单元为电驱动模块,包括:舵机。
5、在一些实施例中,所述传动装置机械连接于基架上,所述传动装置的一端与驱动单元机械连接,所述传动单元的另一端与夹持装置机械连接。
6、在一些实施例中,所述传动装置包括:第一长臂和第二长臂,所述第一长臂的一端设有第一长臂齿,所述第一长臂齿与所述舵机的齿轮啮合连接,所述第一长臂的另一端固定连接所述夹持装置的第一夹爪,所述第二长臂的一端设有第二长臂齿,所述第二长臂齿与第一长臂齿啮合连接,所述第二长臂的另一端固定连接所述夹持装置的第二夹爪。
7、在一些实施例中,所述压力传感器设于所述第一夹爪或第二夹爪的内表面。
8、在一些实施例中,所述压力传感器为柔性压力传感器。
9、在一些实施例中,所述传动装置的制作材料为铝合金。
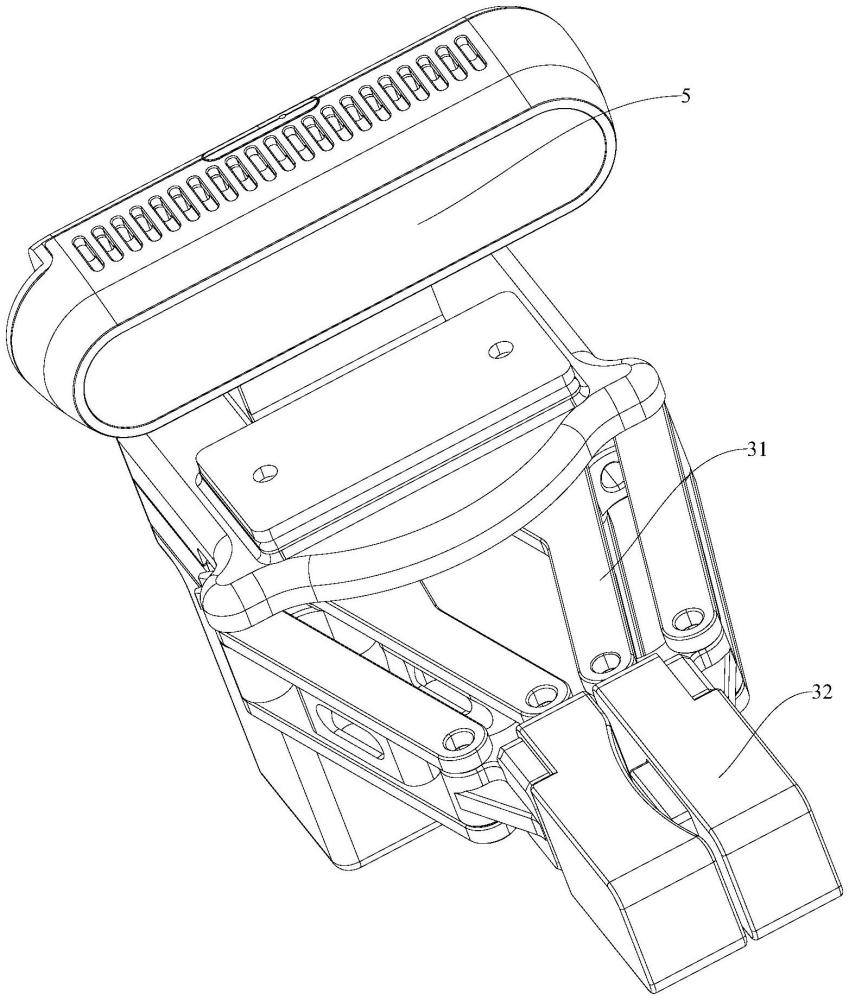
10、在一些实施例中,还包括:视觉模块,所述视觉模块位于所述夹持装置的顶端,通过支架固定连接于所述基架上。
11、在一些实施例中,所述力控系统还包括:通信接口。
12、在一些实施例中,还包括:3d打印外壳,所述3d打印外壳设于基架外侧,通过螺丝与所述基架固定连接。
13、实施本实用新型的力控抓手,具有以下有益效果:通过控制单元的控制信号,可以实现对力控抓手的数字化控制,实现对夹持装置的夹持速度、位置以及夹持力度的精准控制,使力控抓手具有更高的精度和灵活性,具备高柔性的特点,便于对柔性物体的夹取,通过压力传感器对夹持力度的反馈,使力控抓手能够根据目标物的性质和环境条件自动调整夹持力,确保抓取过程的稳定性和安全性。
技术特征:
1.一种力控抓手,包括:控制单元、驱动单元和力控单元,其特征在于,所述控制单元用于发送控制信号,所述驱动单元用于接收所述控制信号,并根据接收的控制信号向所述力控单元提供驱动力,所述力控单元在驱动力作用下对目标物进行夹持;
2.根据权利要求1所述的力控抓手,其特征在于,所述驱动单元固定连接于基架上,所述驱动单元为电驱动模块,包括:舵机。
3.根据权利要求2所述的力控抓手,其特征在于,所述传动装置机械连接于基架上,所述传动装置的一端与驱动单元机械连接,所述传动装置的另一端与夹持装置机械连接。
4.根据权利要求3所述的力控抓手,其特征在于,所述传动装置包括:第一长臂和第二长臂,所述第一长臂的一端设有第一长臂齿,所述第一长臂齿与所述舵机的齿轮啮合连接,所述第一长臂的另一端固定连接所述夹持装置的第一夹爪,所述第二长臂的一端设有第二长臂齿,所述第二长臂齿与第一长臂齿啮合连接,所述第二长臂的另一端固定连接所述夹持装置的第二夹爪。
5.根据权利要求4所述的力控抓手,其特征在于,所述压力传感器设于所述第一夹爪或第二夹爪的内表面。
6.根据权利要求1或5所述的力控抓手,其特征在于,所述压力传感器为柔性压力传感器。
7.根据权利要求4所述的力控抓手,其特征在于,所述传动装置的制作材料为铝合金。
8.根据权利要求4所述的力控抓手,其特征在于,还包括:视觉模块,所述视觉模块位于所述夹持装置的顶端,通过支架固定连接于所述基架上。
9.根据权利要求4所述的力控抓手,其特征在于,所述力控系统还包括:通信接口。
10.根据权利要求4所述的力控抓手,其特征在于,还包括:3d打印外壳,所述3d打印外壳设于基架外侧,通过螺丝与所述基架固定连接。
技术总结
本技术涉及一种力控抓手,包括:控制单元、驱动单元和力控单元,控制单元用于发送控制信号,驱动单元用于接收控制信号,并根据接收的控制信号向力控单元提供驱动力,力控单元在驱动力作用下对目标物进行夹持;力控单元包括:力控系统、传动装置和夹持装置,夹持装置包括:压力传感器,压力传感器设于夹持装置的表面。通过控制单元的控制信号,可实现对力控抓手的数字化控制,实现对夹持装置的夹持速度、位置以及夹持力度的精准控制,使力控抓手具有更高的精度和灵活性,具备高柔性的特点,便于对柔性物体的夹取,通过压力传感器对夹持力度的反馈,使力控抓手能够根据目标物的性质和环境条件自动调整夹持力,确保抓取过程的稳定性和安全性。
技术研发人员:曾智森,苏玉溪,马文科
受保护的技术使用者:深圳朝闻道科技有限公司
技术研发日:20240229
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!