一种电机协同转动关节模组的制作方法
本技术涉及一种关节模组,具体为电机协同转动关节模组,属于关节模组。
背景技术:
1、机器人关节模组是机器人关节部分的核心模块,是一种适用于靠近机体操作的传动形式。它能快速实现机器人各类应用及功能需求,集高性能力矩电机、高精度传感器、高精度谐波减速机、高安全性伺服驱动器和制动器于一体,满足用户大力矩输出、高运动精度、高可靠性的需求,在机器人的关节模组中,轴向磁场电机驱动是一种常见的驱动方式。
2、目前的机器人关节中,多采用一个轴向磁场电机对关节进行驱动,但在实际运行中,单个电机的转矩输出有限,无法满足高负载或快速响应的要求,而且在需要高精度和高稳定性的应用中,单个电机无法提供足够的控制精度和稳定性,当电机出现故障时会导致整个关节或机器人的失去控制,降低了系统的可靠性,单个轴向磁场电机在机器人关节中可能面临转矩输出有限、控制精度和稳定性不足以及系统可靠性问题。为了解决这些问题,我们研发人员采取以下几种策略来增强机器人关节的性能和可靠性:
3、1.电机冗余设计
4、通过采用多个电机来驱动同一个关节,可以实现转矩的叠加,从而提高关节的负载能力和快速响应能力。这种冗余设计不仅提高了系统的性能,还增强了系统的可靠性。即使其中一个电机出现故障,其他电机仍然可以继续工作,保持关节的基本功能。
5、2.先进的控制算法
6、通过引入先进的控制算法,如力矩控制、位置控制、速度控制等,可以更加精确地控制关节的运动,提高系统的控制精度和稳定性。同时,通过实施闭环控制策略,可以实时监测关节的运动状态,及时调整电机的输出,以满足高精度和高稳定性的要求。
7、3.智能化故障诊断与预测
8、通过集成传感器和故障诊断技术,可以实时监测电机的运行状态,及时发现潜在的故障并进行预警。同时,通过利用大数据和机器学习技术,可以对电机的运行数据进行分析,预测电机的使用寿命和可能出现的故障,从而提前进行维护和更换,避免关节或整个机器人失去控制。
9、4.传动机构优化
10、通过优化关节的传动机构,如减速器、联轴器等,可以提高电机的转矩输出效率,减少能量损失和传动误差。同时,通过采用高精度的传动机构,可以进一步提高关节的运动精度和稳定性。
11、5.模块化设计
12、通过采用模块化设计,可以方便地对机器人关节进行升级和维护。每个模块都可以独立地进行更换或升级,而不需要对整个机器人进行拆解和重装。这种设计不仅提高了系统的可维护性,还降低了维护成本和时间。
13、通过采用电机冗余设计、先进的控制算法、智能化故障诊断与预测、传动机构优化以及模块化设计等方法,可以有效地提高机器人关节的性能和可靠性,满足高负载、快速响应、高精度和高稳定性的要求,为此,提出一种电机协同转动关节模组。
技术实现思路
1、有鉴于此,本实用新型提供一种电机协同转动关节模组,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择之一。
2、本实用新型实施例的技术方案是这样实现的:一种电机协同转动关节模组,包括协同转动组件,所述协同转动组件包括三个轴向磁场电机、驱动轴、限位挡环、限位轴、内齿圈、驱动齿轮、限位转环、连杆、限位架、外壳和驱动盘;
3、三个所述轴向磁场电机对称安装于所述外壳的内底壁,所述驱动轴固定连接于所述轴向磁场电机的电机轴,所述驱动齿轮固定连接于所述驱动轴的外侧壁,所述限位挡环固定连接于所述限位轴的外侧壁,所述连杆的顶端固定连接于所述内齿圈的下表面,所述连杆的底端固定连接于所述限位转环的上表面,所述驱动盘固定连接于所述内齿圈的上表面,所述驱动轴的顶端转动连接于所述限位架的下表面,所述限位轴的顶端固定连接于所述限位架的下表面,所述限位轴的底端固定连接于所述外壳的内底壁。
4、进一步优选的,所述限位转环转动连接于所述外壳的内侧壁底部,所述内齿圈转动连接于所述外壳的内侧壁顶部。
5、进一步优选的,所述驱动齿轮的外侧壁啮合连接于所述内齿圈的内侧壁。
6、进一步优选的,所述驱动齿轮的外侧壁贴合于所述限位挡环的外侧壁并与所述限位挡环滑动连接。
7、进一步优选的,所述限位架位于所述驱动盘的下方。
8、进一步优选的,所述驱动盘的上表面安装有安装组件,所述安装组件包括关节连接盘和连接孔;
9、所述关节连接盘固定连接于所述驱动盘的上表面,所述连接孔对称开设于所述关节连接盘的内部。
10、进一步优选的,所述安装组件还包括固定盘和安装孔,所述固定盘固定连接于所述外壳的下表面,所述安装孔对称开设于所述固定盘的内部。
11、进一步优选的,所述外壳的外侧壁对称开设有散热槽。
12、本实用新型实施例由于采用以上技术方案,其具有以下优点:本实用新型通过三个轴向磁场电机分别带动驱动轴转动,可以实现对机器人关节的驱动,通过设置三个轴向磁场电机共同驱动关节连接盘转动,提高了转矩的输出,可以满足高负载和快速响应的要求,提高了对机器人的控制精度和稳定性,当其中一个轴向磁场电机发生故障时,不会影响另外两个轴向磁场电机正常工作,提高了系统的可靠性,通过限位挡环可以对驱动齿轮起到限位作用,内齿圈、连杆和限位转环连接成整体,可以提高整体的承载能力。
13、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种电机协同转动关节模组,包括协同转动组件(101),其特征在于:所述协同转动组件(101)包括三个轴向磁场电机(11)、驱动轴(12)、限位挡环(13)、限位轴(14)、内齿圈(15)、驱动齿轮(16)、限位转环(17)、连杆(18)、限位架(19)、外壳(20)和驱动盘(22);
2.根据权利要求1所述的一种电机协同转动关节模组,其特征在于:所述限位转环(17)转动连接于所述外壳(20)的内侧壁底部,所述内齿圈(15)转动连接于所述外壳(20)的内侧壁顶部。
3.根据权利要求2所述的一种电机协同转动关节模组,其特征在于:所述驱动齿轮(16)的外侧壁啮合连接于所述内齿圈(15)的内侧壁。
4.根据权利要求3所述的一种电机协同转动关节模组,其特征在于:所述驱动齿轮(16)的外侧壁贴合于所述限位挡环(13)的外侧壁并与所述限位挡环(13)滑动连接。
5.根据权利要求1所述的一种电机协同转动关节模组,其特征在于:所述限位架(19)位于所述驱动盘(22)的下方。
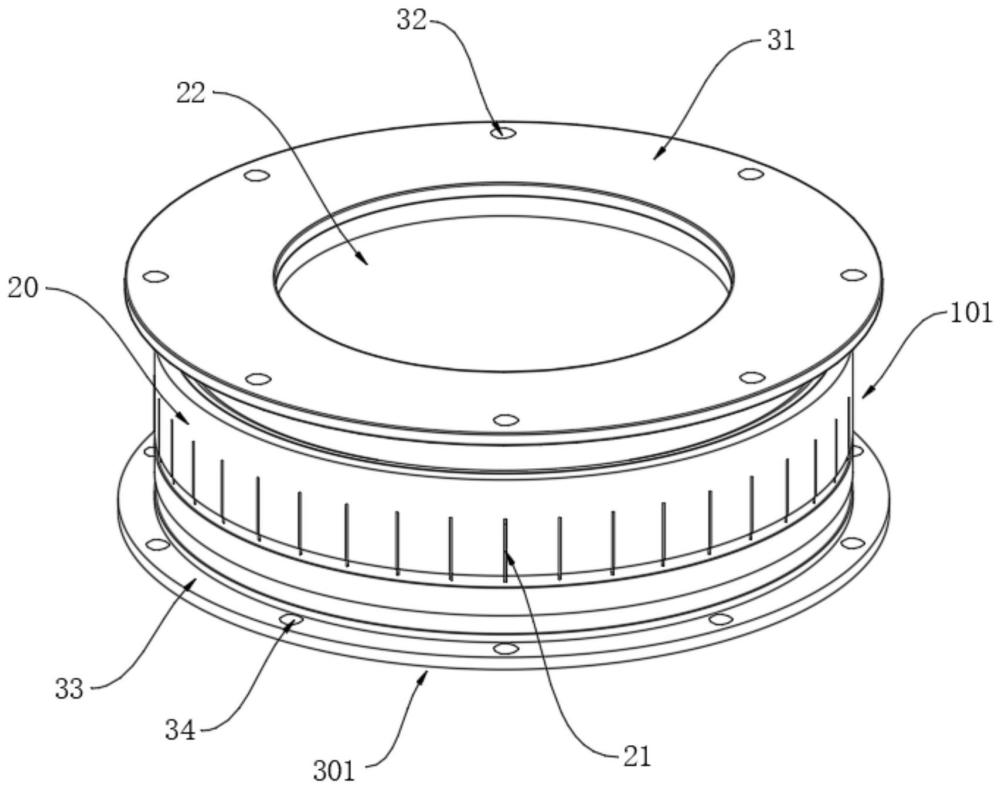
6.根据权利要求5所述的一种电机协同转动关节模组,其特征在于:所述驱动盘(22)的上表面安装有安装组件(301),所述安装组件(301)包括关节连接盘(31)和连接孔(32);
7.根据权利要求6所述的一种电机协同转动关节模组,其特征在于:所述安装组件(301)还包括固定盘(33)和安装孔(34),所述固定盘(33)固定连接于所述外壳(20)的下表面,所述安装孔(34)对称开设于所述固定盘(33)的内部。
8.根据权利要求7所述的一种电机协同转动关节模组,其特征在于:所述外壳(20)的外侧壁对称开设有散热槽(21)。
技术总结
本技术提供了一种电机协同转动关节模组,包括协同转动组件,所述协同转动组件包括三个轴向磁场电机、驱动轴、限位挡环、限位轴、内齿圈、驱动齿轮、限位转环、连杆、限位架、外壳和驱动盘;三个所述轴向磁场电机对称安装于所述外壳的内底壁。本技术通过三个轴向磁场电机分别带动驱动轴转动,可以实现对机器人关节的驱动,通过设置三个轴向磁场电机共同驱动关节连接盘转动,提高了转矩的输出,可以满足高负载和快速响应的要求,提高了对机器人的控制精度和稳定性,当其中一个轴向磁场电机发生故障时,不会影响另外两个轴向磁场电机正常工作,提高了系统的可靠性,内齿圈、连杆和限位转环连接成整体,可以提高整体的承载能力。
技术研发人员:刘顺,邹光华,刘霄
受保护的技术使用者:深圳小象电动科技有限公司
技术研发日:20240307
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!