一种图像识别角度调节机构及会展机器人的制作方法
本技术涉及机器人,具体涉及是一种图像识别角度调节机构及会展机器人。
背景技术:
1、近年来,随着科技水平不断提高,具有自动化、智能化、数字化的机器人逐渐应用于各个行业各个领域,在会展场景中,为了提高工作效率,降低人力成本往往使用会展机器人提供指引和讲解等服务,在不同的会展中通过导入不同的指引路径和场馆讲解内容即可进行服务,降低了培训成本。
2、会展机器人在提供指引和讲解等服务时,需要调用图像识别角度调节机构对路径、场景及访客进行判断,现有的图像识别角度调节机构在图像采集时一边是调用图像识别单元自身的焦圈对采集的角度进行调整,另一方面则是通过改变会展机器人行进的方向对采集的角度进行调整,前者受图像识别单元自身的制约,且通常情况下不同的图像识别单元采集的角度差异不大,后者则是受会展机器人行进机构的制约,通常情况下其是驱动轮和转向轮配合下进行行进方向调整,即需要在行进中变更方向,大部分会展机器人很难做到禁止时改变方向,这在环境图像采集时带来了不便。
技术实现思路
1、本实用新型针对以上问题,提供一种图像识别角度调节机构及会展机器人。
2、采用的技术方案是,一种图像识别角度调节机构,应用于会展机器人主体,所述会展机器人主体顶部设置有连接座,且图像识别角度调节机构安装在连接座上;
3、所述图像识别角度调节机构包括盖体、底板、外壳体和调节单元;
4、所述外壳体通过调节单元安装在底板上,外壳体内能放置图像识别单元;
5、所述盖体与底板可拆卸连接,且盖体罩在底板上,盖体中心处设置有观察孔;
6、所述底板与连接座连接;
7、所述调节单元包括横向调节单元和纵向调节单元,且横向调节单元能带动外壳体横向转动,所述纵向调节单元能带动外壳体竖直转动。
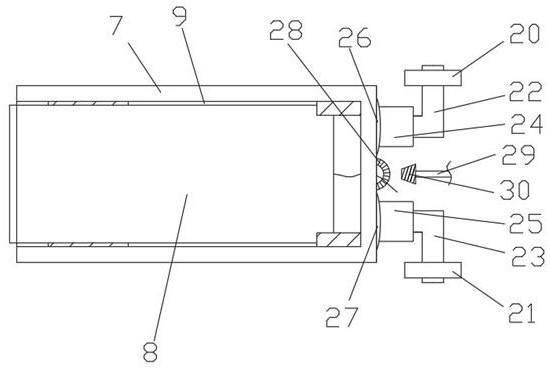
8、进一步的,横向调节单元包括第一固定座、第二固定座、第一曲杆、第二曲杆、第一弹性杆和第二弹性杆;
9、所述第一固定座和第二固定座均与底板连接;
10、所述第一曲杆一端穿过第一固定座与第一弹性杆连接,第一曲杆另一端与电机动力输出端连接;
11、所述第一弹性杆与外壳体底面活动连接;
12、所述第二曲杆一端穿过第二固定座与第二弹性杆连接,第二曲杆另一端与电机动力输出端连接;
13、所述第二弹性杆与外壳体底面活动连接。
14、可选的,第一弹性杆与外壳体底面上部活动连接,所述第二弹性杆与外壳体底面下部活动连接,且第二弹性杆和第一弹性杆与外壳体底面连接处对称设置。
15、可选的,外壳体底面设置有与第一弹性杆连接的第一连接片组和与第二弹性杆连接的第二连接片组。
16、可选的,横向调节单元的横向转动角度为±10°。
17、可选的,纵向调节单元包括伸缩杆和锥齿轮,所述伸缩杆一端与锥齿轮连接,另一端与电机动力输出端连接,且伸缩杆能带动锥齿轮旋转;
18、所述外壳体底面设置有半弧形齿轮,且锥齿轮能与半弧形齿轮啮合。
19、可选的,半弧形齿轮设于第一连接片组和第二连接片组间。
20、可选的,纵向调节单元的纵向转动角度为±5°。
21、本申请还提供了一种会展机器人,包括会展机器人主体和上述实施方式的图像识别角度调节机构,所述会展机器人主体顶部设置有连接座,且图像识别角度调节机构安装在连接座上。
22、本实用新型的有益效果至少包括以下之一;
23、1、通过设置包含横向调节单元和纵向调节单元的图像识别角度调节机构,使得位于外壳体内的图像识别单元可以在一定角度内进行纵向和横向的角度变化,使得在不改变会展机器人行进方向的前提下提升了图像识别单元图像采集的角度。
24、2、一定程度上解决了现有会展机器人受行进机构的制约,通常情况下其是驱动轮和转向轮配合下进行行进方向调整,即需要在行进中变更方向,大部分会展机器人很难做到禁止时改变方向,这在环境图像采集时带来了不便的问题。
技术特征:
1.一种图像识别角度调节机构,其特征在于,应用于会展机器人主体(1),所述会展机器人主体(1)顶部设置有连接座(2),且图像识别角度调节机构安装在连接座(2)上;
2.根据权利要求1所述的一种图像识别角度调节机构,其特征在于,所述第一弹性杆(24)与外壳体(7)底面上部活动连接,所述第二弹性杆(25)与外壳体(7)底面下部活动连接,且第二弹性杆(25)和第一弹性杆(24)与外壳体(7)底面连接处对称设置。
3.根据权利要求2所述的一种图像识别角度调节机构,其特征在于,所述外壳体(7)底面设置有与第一弹性杆(24)连接的第一连接片组(26)和与第二弹性杆(25)连接的第二连接片组(27)。
4.根据权利要求2或3所述的一种图像识别角度调节机构,其特征在于,所述横向调节单元的横向转动角度为±10°。
5.根据权利要求4所述的一种图像识别角度调节机构,其特征在于,所述半弧形齿轮(28)设于第一连接片组(26)和第二连接片组(27)间。
6.根据权利要求5所述的一种图像识别角度调节机构,其特征在于,所述纵向调节单元的纵向转动角度为±5°。
7.一种会展机器人,其特征在于,包括会展机器人主体(1)和如权利要求1至6任一所述的图像识别角度调节机构,所述会展机器人主体(1)顶部设置有连接座(2),且图像识别角度调节机构安装在连接座(2)上。
技术总结
本技术涉及机器人技术领域,具体涉及是一种图像识别角度调节机构及会展机器人,包括盖体、底板、外壳体和调节单元;外壳体通过调节单元安装在底板上,外壳体内能放置图像识别单元;盖体与底板可拆卸连接,且盖体罩在底板上,盖体中心处设置有观察孔;底板与连接座连接;调节单元包括横向调节单元和纵向调节单元,且横向调节单元能带动外壳体横向转动,所述纵向调节单元能带动外壳体竖直转动,通过设置包含横向调节单元和纵向调节单元的图像识别角度调节机构,使得位于外壳体内的图像识别单元可以在一定角度内进行纵向和横向的角度变化,使得在不改变会展机器人行进方向的前提下提升了图像识别单元图像采集的角度。
技术研发人员:张睿睿,徐钦,钟兴隆
受保护的技术使用者:成都睿达四维科技有限公司
技术研发日:20240319
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!