一种用于液力缓速器生产的机械手的制作方法
本技术涉及液力缓速器生产,具体为一种用于液力缓速器生产的机械手。
背景技术:
1、液力缓速器是一种通过液力装置降低车辆行驶速度的汽车缓速器,又称液力减速装置。它是车辆辅助制动装置的一种,与发动机制动、排气制动共同配合使用。液力缓速器的工作原理主要基于液体阻尼产生缓速作用。液力缓速器的优点在于其强劲的制动力矩,能够承担80%到90%的行车制动任务,特别适用于大型车辆,如矿用自卸车等。
2、随着当前汽车制造业竞争程度加剧和消费市场需求升级,低成本、高质量和快交期无疑成为各大汽车整车企业和零部件企业转型升级追求的目标。
3、在传统的液力缓速器壳体、后盖等零件的加工过程中,缓速器在生产过程中有一段是放置在料框内部,在使用时需要分别对料框和缓速器零件进行分拣拆垛。传统分拣拆垛需要人工对各工序的零件进行搬运、上下料等。但由于缓速器机加工零件尺寸大,工人劳动强度高,且存在安全隐患。
4、授权公开号为cn213976027u的中国实用新型专利申请公开了一种缓速器零件的机器人分拣拆垛单元,包括活动部和抓取部,活动部包括安装座,所述安装座上安装有可自由活动的机械臂,所述机械臂的端部设置有第一衔接法兰;抓取部包括工业相机,所述工业相机的前侧为摄像头,后侧设置有与所述第一衔接法兰相互配合的第二衔接法兰,所述工业相机的左、右两侧分别设置有两只手抓和三只手抓。通过两只手抓和三只手抓分别对料框和缓速器零件进行抓取,自动化程度高,代替人工分拣拆垛,节约人力资源,而且效率高,大大提高分拣拆垛效率。
5、但是,上述手抓在对料箱进行抓取时,由于零件盒内部缓速器机加工零件尺寸大,且质量大,机械手在对零件盒进行抓取时与零件盒定位不准确,易发生零件盒前倾或前后移动,导致零件盒脱落,产生一定的安全隐患。
技术实现思路
1、针对现有技术中存在的液力缓速器夹爪夹取零件盒稳定性差的问题,本实用新型提供一种用于液力缓速器生产的机械手。
2、为达到上述目的,本实用新型采用以下技术方案予以实现:
3、一种用于液力缓速器生产的机械手,包括机械手腕,所述机械手腕的端部滑动连接有手指;抓取时,所述手指分位于零件盒两侧,每个手指靠近零件盒的内侧设置有大格夹支撑块和小格夹支撑块;手指连接有动力机构,用于为手指提供动力。
4、优选地,所述机械手腕与手指之间设置有手指基座。
5、优选地,所述手指通过导轨与手指基座滑动连接。
6、优选地,所述动力机构包括气动伸缩气缸,所述气动伸缩气缸的动端与手指连接。
7、优选地,所述气动伸缩气缸的动端与手指之间设置有手指连接杆。
8、优选地,所述气动伸缩气缸连接有气动阀门。
9、优选地,所述大格夹支撑块包括定位支撑台和与之连接的手指安装台;抓取零件盒时,所述定位支撑台卡于零件盒的加强筋处,并与零件盒的抓取边缘卡接;所述手指安装台上设置有安装孔,用于将大格夹支撑块安装在手指内侧。
10、优选地,所述小格夹支撑块包括定位支撑挡肩和与之连接的定位安装台;抓取零件盒时,所述定位支撑挡肩卡于零件盒的加强筋处,并与零件盒的抓取边缘卡接;所述定位安装台上设置有长条安装孔,用于将小格夹支撑块安装在手指内侧。
11、优选地,所述大格夹支撑块沿零件盒两侧对称设置在手指的内侧;所述小格夹支撑块沿零件盒中心呈中心对称设置在手指的内侧。
12、优选地,所述手指的端部设置有探货光电,用于对放货位置进行检测;所述手指与机械手腕连接设置有光电传感器,用于检测零件盒的位置。
13、与现有技术相比,本实用新型具有以下有益效果:
14、本实用新型一种用于液力缓速器生产的机械手,包括机械手腕,所述机械手腕的端部滑动连接有手指;抓取时,所述手指分位于零件盒两侧,每个手指靠近零件盒的内侧设置有大格夹支撑块和小格夹支撑块;手指连接有动力机构,用于为手指提供动力。使用时,通过动力机构为手指提供动力,使手指在机械手腕两侧滑动,抓取时,通过动力机构带动手指沿零件盒两侧向内靠拢,使大格夹支撑块和小格夹支撑块与零件盒卡接定位,实现稳定抓取,在大格夹支撑块的作用下,实现对零件盒的主要定位和受力,在小夹格支撑块的作用下,实现水平方向的限位,保证零件盒在抓取过程中的稳定性。可兼容多种尺寸的零件盒,避免生零件盒前倾或前后移动,导致零件盒脱落的问题。
15、手指基座的设置,可实现手指和机械手腕的稳定连接,进一步保证手指抓取零件盒的稳定性。
16、导轨的设置实现了,手指沿机械手腕两侧的滑动连接,限定了手指的滑动方向。
17、气动伸缩气缸的设置,实现了为手指的滑动提供动力,进而实现手指对零件盒的抓取。
18、手指连接杆的设置,实现了手指与气动伸缩气缸动端的连接,通过力的传递,实现对手指的连动。
19、气动阀门的设置,实现了气动伸缩气缸的气源控制,进而实现对气动伸缩气缸通断的控制,更好的实现对手指的精确定位和移动。
20、所述大格夹支撑块包括定位支撑台和与之连接的手指安装台;抓取零件盒时,所述定位支撑台卡于零件盒的加强筋处,并与零件盒的抓取边缘卡接,实现对零件盒的主要定位和受力支撑;所述手指安装台上设置有安装孔,用于将大格夹支撑块安装在手指内侧。
21、所述小格夹支撑块包括定位支撑挡肩和与之连接的定位安装台;抓取零件盒时,所述定位支撑挡肩卡于零件盒的加强筋处,并与零件盒的抓取边缘卡接,实现对零件盒水平方向的限位和支撑;所述定位安装台上设置有长条安装孔,用于将小格夹支撑块安装在手指内侧。
22、所述大格夹支撑块沿零件盒两侧对称设置在手指的内侧,实现零件盒两侧的定位支撑;所述小格夹支撑块沿零件盒中心呈中心对称设置在手指的内侧,可有效防止因零件盒内部受力不均匀发生倾斜。
23、所述手指的端部设置有探货光电,用于对放货位置进行检测;所述手指与机械手腕连接设置有光电传感器,用于检测手指的位置,使抓取更准确,进一步降低操作人员的劳动强度。
技术特征:
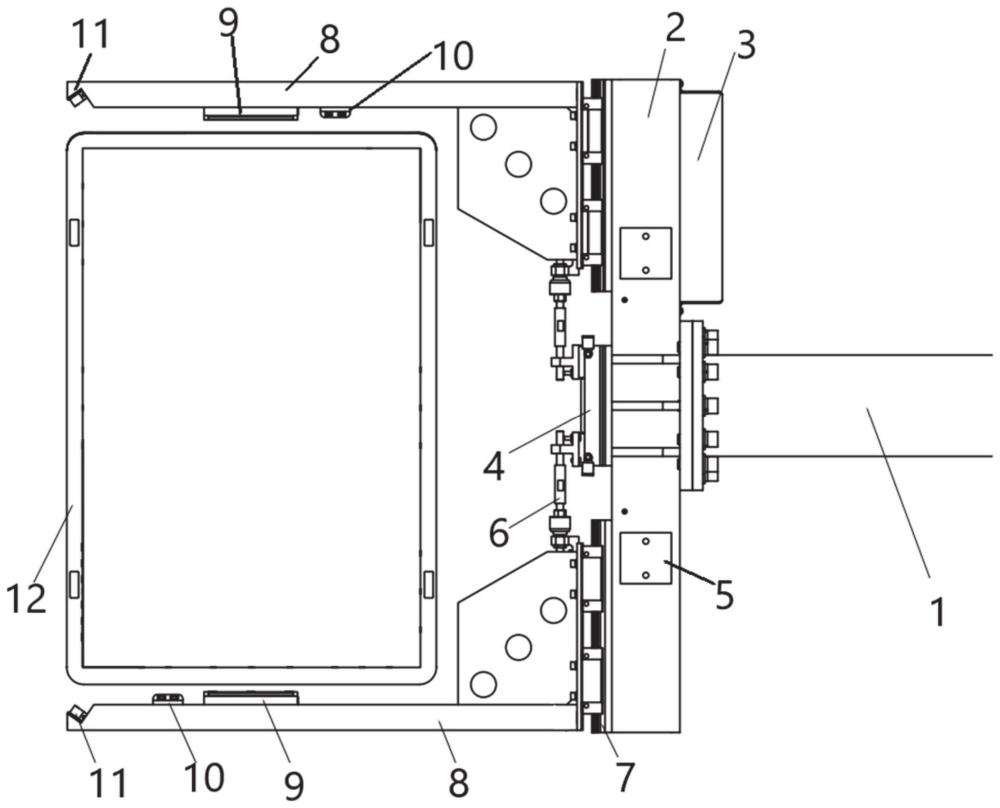
1.一种用于液力缓速器生产的机械手,其特征在于,包括机械手腕(1),所述机械手腕(1)的端部滑动连接有手指(8);抓取时,所述手指(8)分位于零件盒(12)两侧,每个手指(8)靠近零件盒(12)的内侧设置有大格夹支撑块(9)和小格夹支撑块(10);手指(8)连接有动力机构,用于为手指(8)提供动力。
2.根据权利要求1所述的用于液力缓速器生产的机械手,其特征在于,所述机械手腕(1)与手指(8)之间设置有手指基座(2)。
3.根据权利要求2所述的用于液力缓速器生产的机械手,其特征在于,所述手指(8)通过导轨(7)与手指基座(2)滑动连接。
4.根据权利要求1所述的用于液力缓速器生产的机械手,其特征在于,所述动力机构包括气动伸缩气缸(4),所述气动伸缩气缸的动端与手指(8)连接。
5.根据权利要求4所述的用于液力缓速器生产的机械手,其特征在于,所述气动伸缩气缸(4)的动端与手指(8)之间设置有手指连接杆(6)。
6.根据权利要求4所述的用于液力缓速器生产的机械手,其特征在于,所述气动伸缩气缸(4)连接有气动阀门(3)。
7.根据权利要求1所述的用于液力缓速器生产的机械手,其特征在于,所述大格夹支撑块(9)包括定位支撑台(91)和与之连接的手指安装台(92);抓取零件盒(12)时,所述定位支撑台(91)卡于零件盒(12)的加强筋处,并与零件盒(12)的抓取边缘卡接;所述手指安装台(92)上设置有安装孔,用于将大格夹支撑块(9)安装在手指(8)内侧。
8.根据权利要求1所述的用于液力缓速器生产的机械手,其特征在于,所述小格夹支撑块(10)包括定位支撑挡肩(101)和与之连接的定位安装台(102);抓取零件盒(12)时,所述定位支撑挡肩(101)卡于零件盒(12)的加强筋处,并与零件盒(12)的抓取边缘卡接;所述定位安装台(102)上设置有长条安装孔,用于将小格夹支撑块(10)安装在手指(8)内侧。
9.根据权利要求1-8任一项所述的用于液力缓速器生产的机械手,其特征在于,所述大格夹支撑块(9)沿零件盒两侧对称设置在手指(8)的内侧;所述小格夹支撑块(10)沿零件盒中心呈中心对称设置在手指(8)的内侧。
10.根据权利要求1所述的用于液力缓速器生产的机械手,其特征在于,所述手指(8)的端部设置有探货光电(11),用于对放货位置进行检测;所述手指(8)与机械手腕(1)连接设置有光电传感器(5),用于检测零件盒(12)的位置。
技术总结
本技术涉及液力缓速器生产技术领域,尤其是一种用于液力缓速器生产的机械手,包括机械手腕,所述机械手腕的端部滑动连接有手指;抓取时,所述手指分位于零件盒两侧,每个手指靠近零件盒的内侧设置有大格夹支撑块和小格夹支撑块;手指连接有动力机构,用于为手指提供动力。抓取时,通过动力机构带动手指沿零件盒两侧向内靠拢,使大格夹支撑块和小格夹支撑块与零件盒卡接定位,实现稳定抓取,在大格夹支撑块的作用下,实现对零件盒的主要定位和受力,在小夹格支撑块的作用下,实现水平方向的限位,保证零件盒在抓取过程中的稳定性。可兼容多种尺寸的零件盒,避免生零件盒前倾或前后移动,导致零件盒脱落的问题。
技术研发人员:王子游,潘星宇,王永永,刘雪,刘念龙
受保护的技术使用者:陕西法士特汽车传动集团有限责任公司
技术研发日:20240326
技术公布日:2025/4/14
- 还没有人留言评论。精彩留言会获得点赞!