一种新型机器人手臂外部壳体的制作方法
本技术涉及机器人连接部件,尤其涉及一种新型机器人手臂外部壳体。
背景技术:
1、在现代化食品用机械中,机械人在食品行业起着十分重要的作用,这些新型机器人完全可以代替人工来工作,而在机器人整个系统中,机械手臂起到了整个机器人核心部件的作用,它为机械臂工作的末端机械手提供了源源的动力,起到了支撑和连接的作用,因此输送动力的驱动电机和机械手的连接必须保证安装方便,连接性要好、强度要高、韧性要好。
2、目前市场上现有的大部分机器人手臂外部壳体是通过焊接工艺制作而成,该产品的整体性不好、强度较低和连接性较差,从而降低了装置的实用性,不能满足使用者的需求。
技术实现思路
1、为了弥补以上不足,本实用新型提供了一种新型机器人手臂外部壳体,旨在改善现有技术中机器人手臂外部壳体存在整体性不好、强度较低和连接性较差的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:一种新型机器人手臂外部壳体,包括外壳,所述外壳的内部开设有穿线通道,所述外壳的前端顶部设置有第一连接法兰,所述外壳的前端底部设置有第二连接法兰,所述第一连接法兰通过所述穿线通道与第二连接法兰相连接,所述第一连接法兰的前侧四周等距开设有多个第二紧固螺纹孔,所述第二连接法兰的前端四周等距开设有多个第一紧固螺纹孔。
3、作为上述技术方案的进一步描述:
4、所述第一连接法兰的外侧开设有第一密封槽,所述第二连接法兰的外侧开设有第二密封槽。
5、作为上述技术方案的进一步描述:
6、所述外壳的后侧顶部设置有第一密封端面,所述外壳的后侧底部设置有第二密封端面。
7、作为上述技术方案的进一步描述:
8、所述外壳与穿线通道之间形成可存放其他部件的腔体。
9、本实用新型具有如下有益效果:
10、本实用新型中,通过第一连接法兰和第二连接法兰可以与外界部件连接,外壳的两端设置的密封端面和密封槽可以用于密封油液以及防止杂质进入摩擦面的作用,该外壳采用简单的结构,易于铸造,强度较高,韧性较好,装配简单,更换较为方便,从而可以提高该装置的实用性,能够满足使用者的需求。
技术特征:
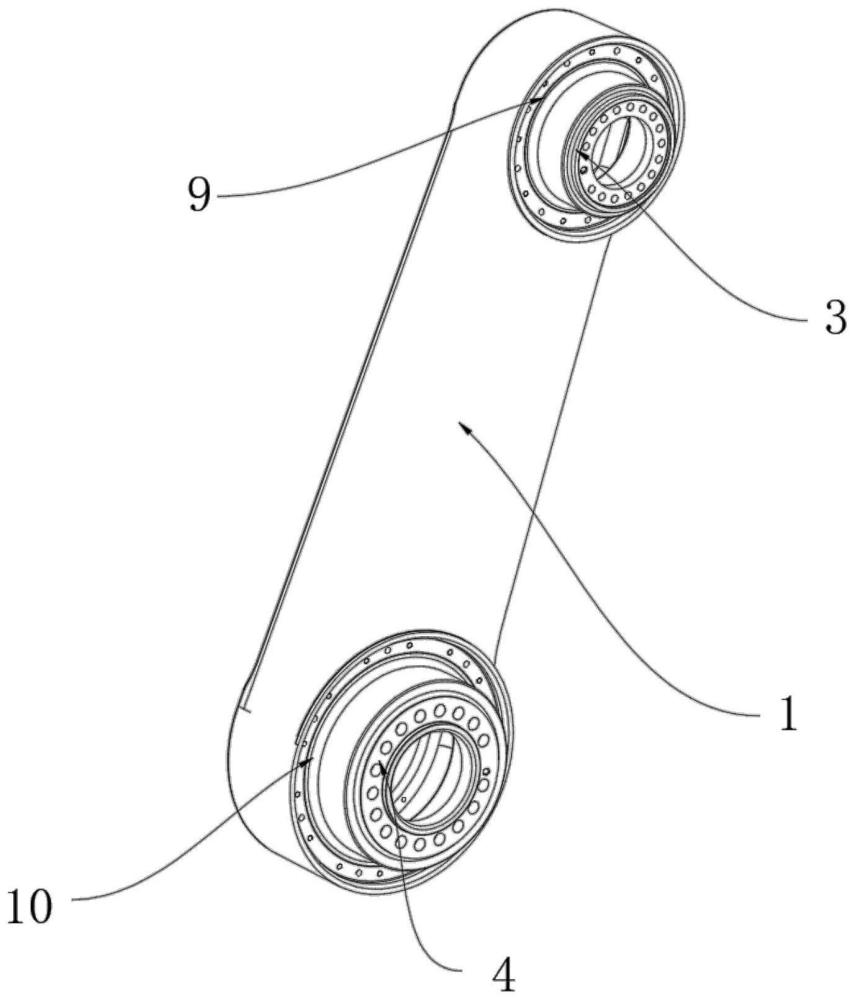
1.一种新型机器人手臂外部壳体,包括外壳(1),其特征在于:所述外壳(1)的内部开设有穿线通道(2),所述外壳(1)的前端顶部设置有第一连接法兰(3),所述外壳(1)的前端底部设置有第二连接法兰(4),所述第一连接法兰(3)通过所述穿线通道(2)与第二连接法兰(4)相连接,所述第一连接法兰(3)的前侧四周等距开设有多个第二紧固螺纹孔(8),所述第二连接法兰(4)的前端四周等距开设有多个第一紧固螺纹孔(5)。
2.根据权利要求1所述的一种新型机器人手臂外部壳体,其特征在于:所述第一连接法兰(3)的外侧开设有第一密封槽(9),所述第二连接法兰(4)的外侧开设有第二密封槽(10)。
3.根据权利要求1所述的一种新型机器人手臂外部壳体,其特征在于:所述外壳(1)的后侧顶部设置有第一密封端面(6),所述外壳(1)的后侧底部设置有第二密封端面(7)。
4.根据权利要求1所述的一种新型机器人手臂外部壳体,其特征在于:所述外壳(1)与穿线通道(2)之间形成可存放其他部件的腔体。
技术总结
本技术涉及机器人连接部件技术领域,公开了一种新型机器人手臂外部壳体,包括外壳,所述外壳的内部开设有穿线通道,所述外壳的前端顶部设置有第一连接法兰,所述外壳的前端底部设置有第二连接法兰,所述第一连接法兰通过所述穿线通道与第二连接法兰相连接,所述第一连接法兰的前侧四周等距开设有多个第二紧固螺纹孔,所述第二连接法兰的前端四周等距开设有多个第一紧固螺纹孔,所述第一连接法兰的外侧开设有第一密封槽,所述第二连接法兰的外侧开设有第二密封槽。本技术中,通过第一连接法兰和第二连接法兰可以与外界部件连接,该外壳采用简单的结构,易于铸造,强度较高,韧性较好,装配简单。
技术研发人员:刘焕博
受保护的技术使用者:大连福岛精密零部件股份有限公司
技术研发日:20240327
技术公布日:2025/3/18
- 还没有人留言评论。精彩留言会获得点赞!