一种快换结构及使用该结构的机器人的制作方法
本技术属于机器人,具体涉及一种快换结构及使用该结构的机器人。
背景技术:
1、随着科技的发展和生活水平的提高,机器人在人们工作、学习和生活中得到广泛应用。快换结构可以实现快速更换末端电器,使机器人的利用效率大大提高,实现一机多用,使机器人的应用更具广泛性。
2、而现有的机器人快换结构大多存在结构复杂、精度要求高、价格昂贵、适用性有限等问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺陷与不足,设计的一种结构简单,稳定可靠,既方便有效,又提高更换效率的快换结构及使用该结构的机器人。
2、为实现上述目的,本实用新型所采用的技术方案是:一种快换结构,包括第一连接件和第二连接件,所述第一连接件和第二连接件之间通过配合设置的插接柱和插接筒进行定位插接,所述插接柱的周向上布置有多个滑动配合的锁止件,所述插接筒内具有与锁止件对应设置的锁止槽,所述锁止件能够在第一连接件和第二连接件定位插接后伸入锁止槽内,将插接筒限位锁定在插接柱上,以防止所述第一连接件和第二连接件之间轴向脱开。
3、优选的,所述锁止件选用球体结构。
4、优选的,所述插接柱内设置与锁止件斜面配合的活塞杆,所述活塞杆通过传动杆连接驱动杆,且活塞杆能够在驱动杆左右移动的驱动下进行上下移动,当活塞杆向下移动时,锁止件被顶出并限位,当活塞杆向上移动时,锁止件的限位被解除。
5、优选的,所述驱动杆的移动方向与轴线方向相垂直,且驱动杆一端为按压端,延伸至第一连接件外部,另一端设有弹性件。
6、优选的,所述驱动杆与第一连接件之间还设有相配合的限位销和限位槽,用于限制驱动杆的左右移动行程。
7、优选的,所述锁止槽的上方具有限位凸起,所述限位凸起的上下两侧均为与锁止件相配合的斜面设计。
8、优选的,所述第一连接件和第二连接件之间还设有多个相配合的定位导向孔和定位导向柱。
9、优选的,所述第一连接件和第二连接件之间还设有相配合的电气接插件,用于与外部实现电气连接。
10、一种机器人,包括:
11、上述快换结构;
12、机械臂,所述机械臂的自由端与所述第一连接件连接;
13、以及与所述第二连接件连接的电器件。
14、采用上述技术方案后,本实用新型提供的一种快换结构及使用该结构的机器人具有以下有益效果:
15、本实用新型通过相对应的插接柱和插接筒的设计,既能够保证第一连接件和第二连接件径向位置固定,又无需精准对位,盲插即可到位,方便快捷;通过锁止件与锁止槽限位配合的设计,能够将插接筒限位锁定在插接柱上,使第一连接件和第二连接件之间无法发生轴向相对运动,即保证轴向位置固定;通过限位凸起两侧斜面的设计,能够减少插接筒与插接柱之间发生相对移动时的阻力,保证插接筒插接和拔出时的顺滑性;通过定位导向孔和定位导向柱的设计,既能够起到定位导向作用,又能够进一步保证第一连接件和第二连接件之间无法发生径向相对运动,从而保证第一连接件和第二连接件之间连接的稳定性;通过电气接插件的设计,能够保证与外部形成稳定的电连接功能。因此,本实用新型结构简单、操作方便,实现了机械臂自由端的快换功能,具有连接稳定、更换效率高、适用范围广等优点。
技术特征:
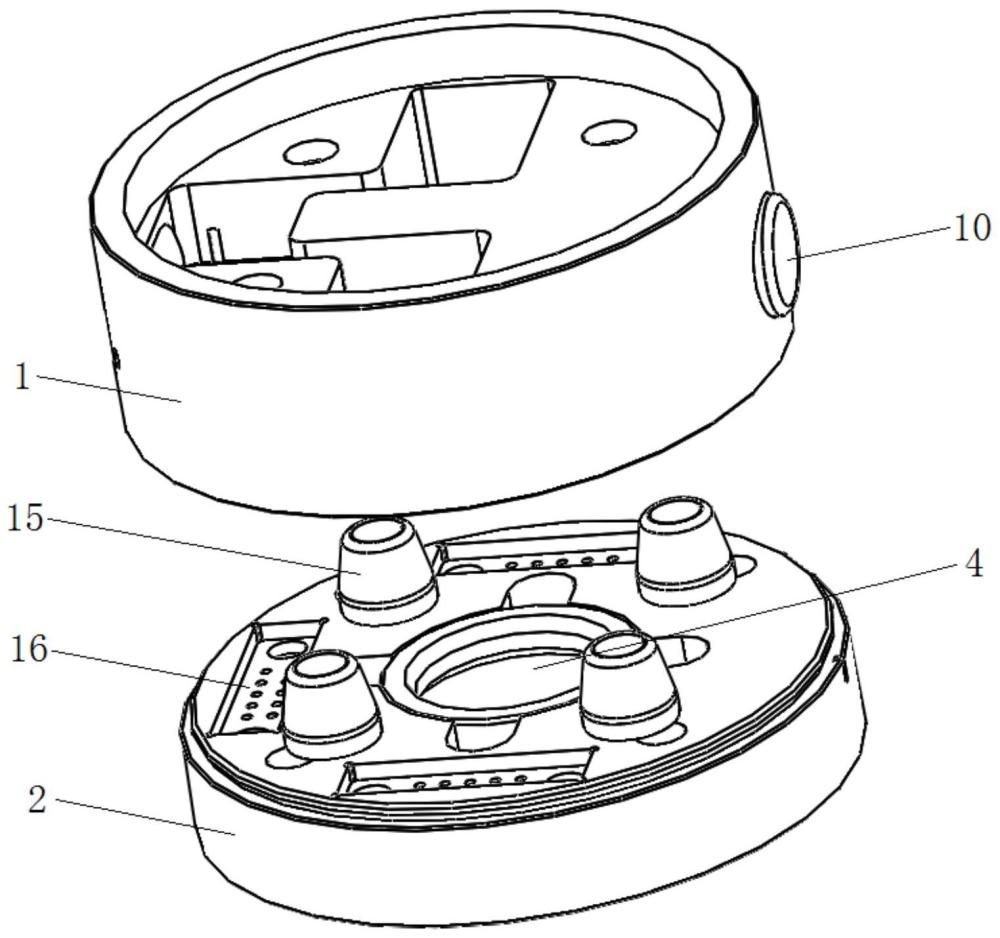
1.一种快换结构,其特征在于:包括第一连接件(1)和第二连接件(2),所述第一连接件(1)和第二连接件(2)之间通过配合设置的插接柱(3)和插接筒(4)进行定位插接,所述插接柱(3)的周向上布置有多个滑动配合的锁止件(5),所述插接筒(4)内具有与锁止件(5)对应设置的锁止槽(6),所述锁止件(5)能够在第一连接件(1)和第二连接件(2)定位插接后伸入锁止槽(6)内,将插接筒(4)限位锁定在插接柱(3)上,以防止所述第一连接件(1)和第二连接件(2)之间轴向脱开。
2.根据权利要求1所述的一种快换结构,其特征在于:所述锁止件(5)选用球体结构。
3.根据权利要求1所述的一种快换结构,其特征在于:所述插接柱(3)内设置与锁止件(5)斜面配合的活塞杆(7),所述活塞杆(7)通过传动杆(8)连接驱动杆(9),且活塞杆(7)能够在驱动杆(9)左右移动的驱动下进行上下移动,当活塞杆(7)向下移动时,锁止件(5)被顶出并限位,当活塞杆(7)向上移动时,锁止件(5)的限位被解除。
4.根据权利要求3所述的一种快换结构,其特征在于:所述驱动杆(9)的移动方向与轴线方向相垂直,且驱动杆(9)一端为按压端(10),延伸至第一连接件(1)外部,另一端设有弹性件。
5.根据权利要求3所述的一种快换结构,其特征在于:所述驱动杆(9)与第一连接件(1)之间还设有相配合的限位销(11)和限位槽(12),用于限制驱动杆(9)的左右移动行程。
6.根据权利要求1所述的一种快换结构,其特征在于:所述锁止槽(6)的上方具有限位凸起(13),所述限位凸起(13)的上下两侧均为与锁止件(5)相配合的斜面设计。
7.根据权利要求1所述的一种快换结构,其特征在于:所述第一连接件(1)和第二连接件(2)之间还设有多个相配合的定位导向孔(14)和定位导向柱(15)。
8.根据权利要求1所述的一种快换结构,其特征在于:所述第一连接件(1)和第二连接件(2)之间还设有相配合的电气接插件(16),用于与外部实现电气连接。
9.一种机器人,其特征在于,包括:
技术总结
本技术属于机器人技术领域,涉及一种快换结构及使用该结构的机器人,快换结构包括第一连接件和第二连接件,第一连接件和第二连接件之间通过配合设置的插接柱和插接筒进行定位插接,插接柱的周向上布置有多个滑动配合的锁止件,插接筒内具有与锁止件对应设置的锁止槽,锁止件能够在第一连接件和第二连接件定位插接后伸入锁止槽内,将插接筒限位锁定在插接柱上,以防止第一连接件和第二连接件之间轴向脱开,锁止件被垂直于轴线方向滑动装配,插接柱内设置与锁止件斜面配合的活塞杆,活塞杆在驱动杆左右移动的驱动下进行上下移动。本技术结构简单、操作方便,实现了机械臂自由端的快换功能,具有连接稳定、更换效率高、适用范围广等优点。
技术研发人员:魏洪兴,赵永利,陈达坚,蒋晶尔,孙安琦
受保护的技术使用者:遨博(山东)智能机器人有限公司
技术研发日:20240417
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!