一种焦化炉巡检机器人轨道的制作方法
本技术涉及轨道,尤其涉及一种焦化炉巡检机器人轨道。
背景技术:
1、焦化炉作为煤化工的关键设备之一。在生产过程中扮演着举足轻重的角色。然而,由于其运行环境通常涉及高温、高湿、高粉尘等恶劣条件,轨道式巡检机器人应运而生,巡检机器人通过轨道进行导航和定位,实现了对焦化炉的自动化、高效化巡检。这种巡检机器人轨道的铺设不仅减少了巡检机器人在复杂环境中的导航难度,还提高了巡检的稳定性和效率。
2、然而,传统的巡检机器人轨道的铺设和维护成本较高,一旦轨道受损,将直接影响巡检机器人的正常运行。在实际运行过程中,巡检轨道的磨损问题日益凸显,严重影响了焦化炉巡检工作的正常运行和轨道的使用寿命。基于上述问题,我们提出了一种焦化炉巡检机器人轨道,能够在轨道的接触面上实现自动上料润滑,可有效减少摩擦和磨损,延长轨道的使用寿命。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种焦化炉巡检机器人轨道。
2、为了实现上述目的,本实用新型采用了如下技术方案:
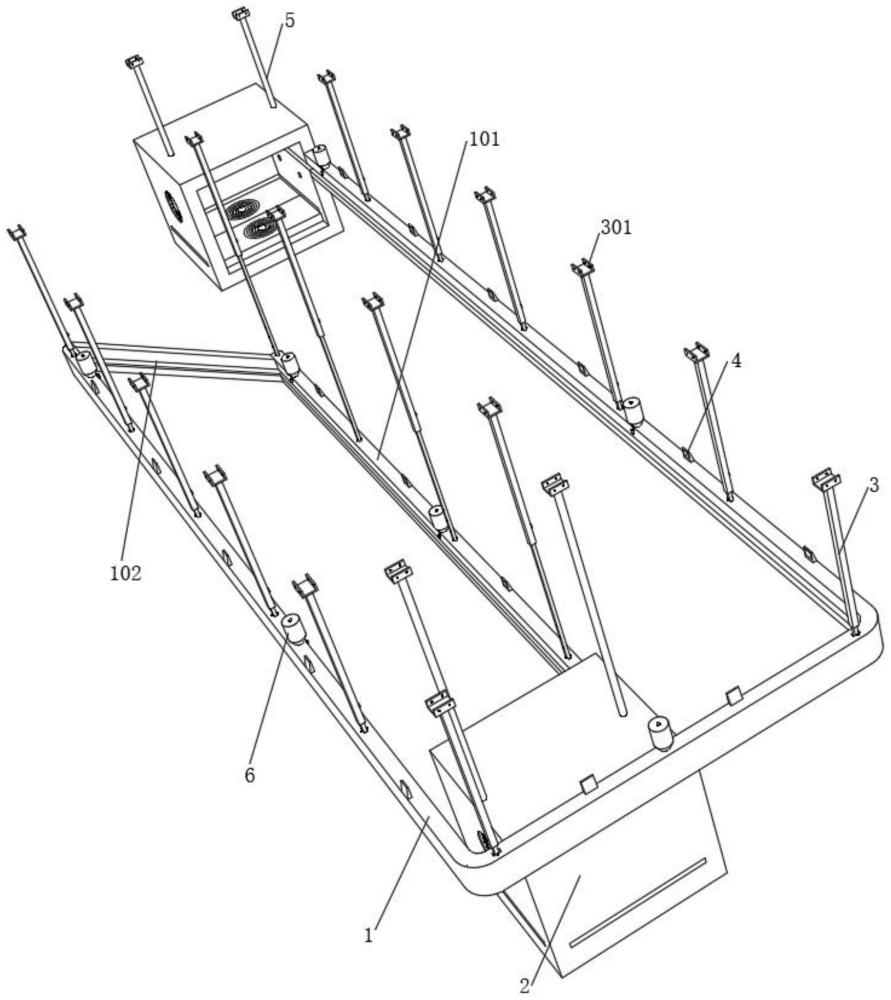
3、一种焦化炉巡检机器人轨道,包括通过连接结构连接固定的轨道本体和两个分别设置于轨道本体首尾两端的中转室,所述轨道本体包括呈一体式结构的轨道a、呈倾斜状的轨道c和轨道b;所述轨道本体的顶部面固定连接有多个结构相同的自动注油结构。
4、作为本实用新型再进一步的方案:所述自动注油结构包括设置于轨道本体滑轨顶部内壁的出油孔、固定连接于轨道本体顶部面的油筒、固定连接于油筒圆周内壁的条形杆、放置于油筒圆周内壁的圆形挡块、固定连接于挡块与条形杆相对应一侧面的弹簧、固定连接于挡块底部面且呈‘ㄣ’形的顶杆、设置于轨道本体一侧面的通槽。
5、作为本实用新型再进一步的方案:所述出油孔与油筒的出口相连通;
6、所述油筒的底部面呈锥形状。
7、作为本实用新型再进一步的方案:所述顶杆插设于轨道本体的顶部内壁且与通槽构成上下滑动配合。
8、作为本实用新型再进一步的方案:所述连接结构包括支撑杆、固定连接于支撑杆顶端的连接头、插设于支撑杆底部内壁的t型杆、多个呈等距式设置于支撑杆和t型杆一侧面的通孔、同一个插设于前后位置对应的两个通孔内壁的定位销、若干个呈等距式设置于轨道本体顶部内壁的方形孔、用于将t型杆可拆卸连接于方形孔内壁的紧固件。
9、作为本实用新型再进一步的方案:所述中转室的顶部面固定连接有支杆;所述中转室的一侧面设置有导轨;
10、所述中转室的底部内壁设置有两个无线充电发射模块。
11、作为本实用新型再进一步的方案:所述中转室的外壁设置有透气孔;所述中转室的一侧面设置有风机;
12、所述中转室的一侧内壁设置有两个光幕传感器组件。
13、作为本实用新型再进一步的方案:所述轨道本体的顶部面固定连接有电子标签。
14、与现有技术相比,本实用新型提供了一种焦化炉巡检机器人轨道,具备以下有益效果:
15、1.该焦化炉巡检机器人轨道,通过设置有自动注油结构,当巡检小车在轨道本体内爬行期间,受其自身结构限制会碰触顶杆一端,进而挤压其在通槽内上移,使得弹簧压缩,而圆形挡块在顶杆的顶撑下上移一定高度,此时挡块上方的油液会从挡块外壁与油筒之间的间隙内渗出,从而从油筒的出口流入出油孔内,以便在巡检小车移动期间通过滚轮与轨道本体滑轨的接触而实现对滑轨内部的自动上油润滑工作,对其进行保护,能够在轨道的接触面上实现自动上料润滑,可有效减少摩擦和磨损,延长轨道的使用寿命,保证焦化炉巡检工作的正常运行。
16、2.该焦化炉巡检机器人轨道,将t型杆的底端从方形孔端口插入其内,并旋转度,再旋入紧固件从而使得t型杆与轨道本体形成固定连接,然后根据轨道本体与厂房吊顶的实际吊装高度,调节t型杆在支撑杆内的延伸长度,并旋入定位销对吊撑高度进行限位,最后通过外部螺栓等将连接头固定安装于厂房吊顶上即可;通过若干个连接结构能够使得轨道本体牢牢固定连接,从而能够提高轨道本体在使用期间的牢固性和平稳性。
17、3.该焦化炉巡检机器人轨道,当巡检小车进入中转室内后,会遮挡光幕传感器组件的光线,其传递信号至控制模块,以便控制模块操控风机启动,用于对中转室内的巡检小车进行风冷降温工作,提高中转室内外的气流交换,增加巡检小车工作后的散热效率,有效提高巡检小车的使用寿命,保证巡检小车在后期的顺利巡检工作。
技术特征:
1.一种焦化炉巡检机器人轨道,包括通过连接结构连接固定的轨道本体和两个分别设置于轨道本体首尾两端的中转室(2),其特征在于,所述轨道本体包括呈一体式结构的轨道a(1)、呈倾斜状的轨道c(102)和轨道b(101);所述轨道本体的顶部面固定连接有多个结构相同的自动注油结构。
2.根据权利要求1所述的一种焦化炉巡检机器人轨道,其特征在于,所述自动注油结构包括设置于轨道本体滑轨顶部内壁的出油孔(602)、固定连接于轨道本体顶部面的油筒(6)、固定连接于油筒(6)圆周内壁的条形杆、放置于油筒(6)圆周内壁的圆形挡块、固定连接于挡块与条形杆相对应一侧面的弹簧(601)、固定连接于挡块底部面且呈‘ㄣ’形的顶杆(603)、设置于轨道本体一侧面的通槽(604)。
3.根据权利要求2所述的一种焦化炉巡检机器人轨道,其特征在于,所述出油孔(602)与油筒(6)的出口相连通;
4.根据权利要求3所述的一种焦化炉巡检机器人轨道,其特征在于,所述顶杆(603)插设于轨道本体的顶部内壁且与通槽(604)构成上下滑动配合。
5.根据权利要求1所述的一种焦化炉巡检机器人轨道,其特征在于,所述连接结构包括支撑杆(3)、固定连接于支撑杆(3)顶端的连接头(301)、插设于支撑杆(3)底部内壁的t型杆、多个呈等距式设置于支撑杆(3)和t型杆一侧面的通孔(302)、同一个插设于前后位置对应的两个通孔(302)内壁的定位销(303)、若干个呈等距式设置于轨道本体顶部内壁的方形孔(304)、用于将t型杆可拆卸连接于方形孔(304)内壁的紧固件(305)。
6.根据权利要求5所述的一种焦化炉巡检机器人轨道,其特征在于,所述中转室(2)的顶部面固定连接有支杆(5);所述中转室(2)的一侧面设置有导轨(7);
7.根据权利要求6所述的一种焦化炉巡检机器人轨道,其特征在于,所述中转室(2)的外壁设置有透气孔(201);所述中转室(2)的一侧面设置有风机(10);
8.根据权利要求1所述的一种焦化炉巡检机器人轨道,其特征在于,所述轨道本体的顶部面固定连接有电子标签(4)。
技术总结
本技术公开了一种焦化炉巡检机器人轨道,包括通过连接结构连接固定的轨道本体和两个分别设置于轨道本体首尾两端的中转室,所述轨道本体包括呈一体式结构的轨道A、呈倾斜状的轨道C和轨道B;所述轨道本体的顶部面固定连接有多个结构相同的自动注油结构;所述自动注油结构包括设置于轨道本体滑轨顶部内壁的出油孔、固定连接于轨道本体顶部面的油筒、固定连接于油筒圆周内壁的条形杆、放置于油筒圆周内壁的圆形挡块、固定连接于挡块与条形杆相对应一侧面的弹簧。本技术能够在轨道的接触面上实现自动上料润滑,可有效减少摩擦和磨损,延长轨道的使用寿命,保证焦化炉巡检工作的正常运行。
技术研发人员:杨来法,杨燕海,张红昌,马志宏
受保护的技术使用者:河南省顺聚能源科技有限公司
技术研发日:20240418
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!