一种钨粉圆棒压制成型用收料机械手的制作方法
本技术属于机械手,涉及一种钨粉圆棒压制成型用收料机械手。
背景技术:
1、现有铣刀、钻头等工具在生产时,需要先将其生产成棒料,现有的铣刀棒料通常采用配比混料、压制、烧结等工艺进行生产,现有的棒料压制生产后,需要将压制成型的棒料取出,将棒料送入烧结装置进行烧结。
2、现有的棒料压制成型后,多采用人工进行取料,但是人工无法保证在取料时棒料表面受力均衡,容易导致棒料表面损坏,同时,人工取料速度较慢,导致棒料生产效率降低,因此,我们提出一种钨粉圆棒压制成型用收料机械手。
技术实现思路
1、本实用新型的目的是针对现有的技术存在上述问题,提出了一种钨粉圆棒压制成型用收料机械手,该装置要解决的技术问题是:如何自动取出棒料,从而提高棒料生产效率。
2、本实用新型的目的可通过下列技术方案来实现:
3、一种钨粉圆棒压制成型用收料机械手,包括安装板和调节组件,所述调节组件包括两个升降电动推杆,两个升降电动推杆均固定在安装板的上方,两个升降电动推杆的上方固定有t型板,t型板上固定有两个多级电动推杆,两个多级电动推杆的端部固定有u型块,u型块的内部固定有矩形杆,矩形杆上设置有夹持组件。
4、所述安装板的上方设置有收集箱,安装板的下方固定有u型板,u型板的内部固定有隔板,u型板的底部设置有蓄电池,蓄电池的上方设置有控制盒,u型板的侧面开设有放置口。
5、采用以上结构,蓄电池可以为其他部件提供动力,收集箱可以对钨粉圆棒进行收集,隔板可以放置收集箱。
6、所述夹持组件包括两个移动板和两个挤压电动推杆,两个移动板滑动设置在矩形杆上,两个移动板的下方均固定有第一夹持爪,两个第一夹持爪相互对称,第一夹持爪的两端均连接有第二夹持爪,第一夹持爪和第二夹持爪的内部均设置有气囊,若干气囊通过连接头相互连接,两个挤压电动推杆均固定在u型块上,两个挤压电动推杆相互对称,两个挤压电动推杆的端部均固定在对应位置的移动板上,第一夹持爪和第二夹持爪的内侧均呈弧形,气囊充气后夹持侧呈弧形。
7、采用以上结构,两个挤压电动推杆伸展带动移动板移动,移动板带动第一夹持爪进行移动,第一夹持爪带动两个第二夹持爪进行移动,第一夹持爪和第二夹持爪带动气囊贴合在钨粉圆棒上,第一夹持爪和第二夹持爪的内侧均呈弧形,方便对钨粉圆棒进行夹持,气囊充气后呈弧形,充气鼓起后可以对钨粉圆棒进行包覆夹持。
8、所述夹持组件还包括气泵,气泵固定在u型块的内部,气泵的出气口连接有两个连通软管,两个连通软管的端部分别连接在对应位置的第一夹持爪上,且两个连通软管的端部与对应位置的气囊上。
9、采用以上结构,气泵将空气输送到连通软管内部,连通软管将空气输送到气囊的内部,气囊鼓起对钨粉圆棒进行夹持。
10、所述蓄电池分别与多级电动推杆、升降电动推杆、控制盒、挤压电动推杆和气泵电性连接。
11、采用以上结构,控制盒可以控制多级电动推杆、升降电动推杆、挤压电动推杆和气泵启停,蓄电池可以为多级电动推杆、升降电动推杆、挤压电动推杆和气泵提供动力。
12、与现有技术相比,本钨粉圆棒压制成型用收料机械手具有以下优点:
13、通过调节组件和夹持组件配合,两个挤压电动推杆伸展带动移动板移动,移动板带动第一夹持爪进行移动,第一夹持爪带动两个第二夹持爪进行移动,第一夹持爪和第二夹持爪带动气囊贴合在钨粉圆棒上,气泵将空气输送到连通软管内部,连通软管将空气输送到气囊的内部,气囊鼓起对钨粉圆棒进行夹持,保证在取料时棒料表面受力均衡,避免棒料表面损坏,同时,可以对棒料进行自动取料,提高了棒料的取料速度,进一步的,提高了棒料的生产效率。
技术特征:
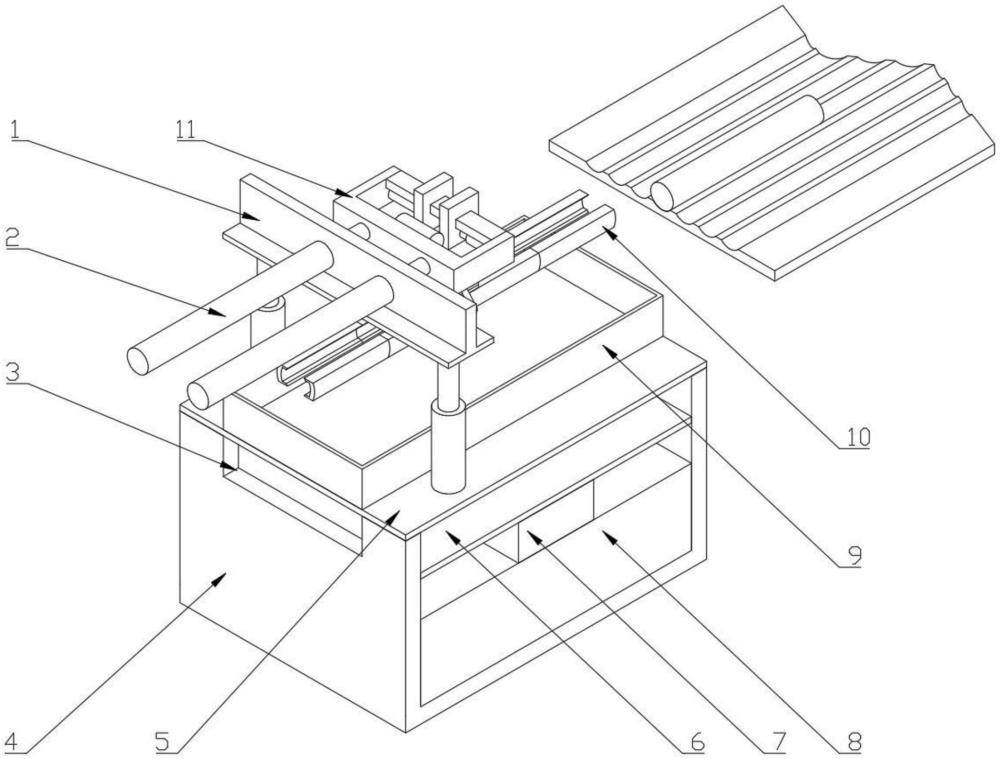
1.一种钨粉圆棒压制成型用收料机械手,其特征在于,包括安装板(5)和调节组件,调节组件包括两个升降电动推杆(13),两个升降电动推杆(13)均固定在安装板(5)的上方,两个升降电动推杆(13)的上方固定有t型板(1),t型板(1)上固定有两个多级电动推杆(2),两个多级电动推杆(2)的端部固定有u型块(11),u型块(11)的内部固定有矩形杆(18),矩形杆(18)上设置有夹持组件。
2.根据权利要求1所述的一种钨粉圆棒压制成型用收料机械手,其特征在于,所述安装板(5)的上方设置有收集箱(9),安装板(5)的下方固定有u型板(4),u型板(4)的内部固定有隔板(6),u型板(4)的底部设置有蓄电池(8),蓄电池(8)的上方设置有控制盒(7),u型板(4)的侧面开设有放置口(3)。
3.根据权利要求2所述的一种钨粉圆棒压制成型用收料机械手,其特征在于,所述夹持组件包括两个移动板(17)和两个挤压电动推杆,两个移动板(17)滑动设置在矩形杆(18)上,两个移动板(17)的下方均固定有第一夹持爪(16),两个第一夹持爪(16)相互对称,第一夹持爪(16)的两端均连接有第二夹持爪(10),第一夹持爪(16)和第二夹持爪(10)的内部均设置有气囊(20),若干气囊(20)通过连接头相互连接,两个挤压电动推杆均固定在u型块(11)上,两个挤压电动推杆相互对称,两个挤压电动推杆的端部均固定在对应位置的移动板(17)上,第一夹持爪(16)和第二夹持爪(10)的内侧均呈弧形,气囊(20)充气后夹持侧呈弧形。
4.根据权利要求3所述的一种钨粉圆棒压制成型用收料机械手,其特征在于,所述夹持组件还包括气泵(19),气泵(19)固定在u型块(11)的内部,气泵(19)的出气口连接有两个连通软管(12),两个连通软管(12)的端部分别连接在对应位置的第一夹持爪(16)上,且两个连通软管(12)的端部与对应位置的气囊(20)上。
5.根据权利要求4所述的一种钨粉圆棒压制成型用收料机械手,其特征在于,所述蓄电池(8)分别与多级电动推杆(2)、升降电动推杆(13)、控制盒(7)、挤压电动推杆和气泵(19)电性连接。
技术总结
本技术提供了一种钨粉圆棒压制成型用收料机械手,属于机械手技术领域,用于解决现有棒料人工取料速度慢,导致棒料生产效率低的问题。包括安装板和调节组件,调节组件包括两个升降电动推杆,两个升降电动推杆均固定在安装板的上方,两个升降电动推杆的上方固定有T型板,T型板上固定有两个多级电动推杆,两个多级电动推杆的端部固定有U型块,U型块的内部固定有矩形杆,矩形杆上设置有夹持组件;本技术通过调节组件和夹持组件配合,第一夹持爪和第二夹持爪带动气囊贴合在钨粉圆棒上,气泵将空气输送到连通软管内部,将空气输送到气囊的内部,气囊对钨粉圆棒进行夹持,保证在取料时棒料表面受力均衡,提高了棒料的生产效率。
技术研发人员:刘荣伍,吴杰,王飞,王剑
受保护的技术使用者:六安致京新材料有限公司
技术研发日:20240418
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!