一种双限位式单轴机器人的制作方法
本技术涉及机器人,具体涉及一种双限位式单轴机器人。
背景技术:
1、单轴机器人是一种由马达驱动的移动平台,主要由滚珠螺杆和u型线性滑轨导引构成。滑座同时为滚珠螺杆的驱动螺帽及线性滑轨的导引滑块。单轴机器人可以在半导体、光电、交通运输、环保节能产业、精密工具机、机械产业、智慧自动化、生物医疗等领域发挥重要作用。
2、双限位式单轴机器人是一种具有双限位功能的单轴机器人。在单轴机器人的基础上,增加了双限位装置,使其在运动过程中具有更高的控制精度和安全性。而在实际应用中,限位开关的触点在长期使用过程中会受到磨损,不方便更换,影响其正常工作。且限位开关需要与目标物体进行直接接触,可能会造成干涉问题。
3、因此,发明一种双限位式单轴机器人来解决上述问题很有必要。
技术实现思路
1、本实用新型的目的是提供一种双限位式单轴机器人,以解决技术中的上述不足之处。
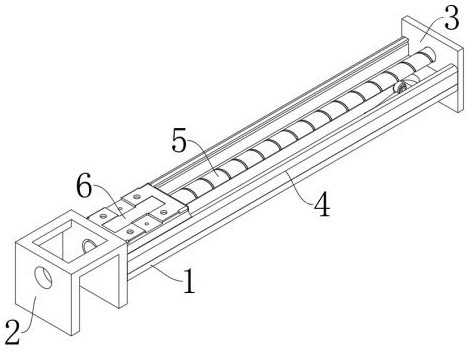
2、为了实现上述目的,本实用新型提供如下技术方案:一种双限位式单轴机器人,包括底座,所述底座的前端固定安装有马达座,所述底座的尾端固定安装有尾座,所述马达座和尾座之间,且位于底座的底部下方设置有支撑条,所述支撑条的两端分别设置有限位开关;所述底座的横向中心线部位开设有通槽,两个所述限位开关分别与底座上的通槽相对应,所述底座上方设置有螺纹座,所述螺纹座的底部与限位开关的触头相接触,所述螺纹座的两侧均设置有凸起部。
3、作为本实用新型的优选方案,所述底座的上方两侧均固定安装有限位条,两个所述限位条的内侧均开设有导向槽,所述螺纹座的两侧凸起部与两个限位条内侧的导向槽相适配且滑动连接。
4、作为本实用新型的优选方案,所述螺纹座的两侧且位于凸起部的上方固定安装有防尘片,两个所述防尘片分别位于两个限位条的顶部上方。
5、作为本实用新型的优选方案,所述马达座和尾座之间,且位于底座的上方转动安装有丝杆,所述螺纹座螺纹套接在丝杆上,所述丝杆与底座的通槽位置相对应。
6、作为本实用新型的优选方案,所述尾座的正面下方开设有插孔,所述支撑条的一端插设在插孔内,所述支撑条的一端与马达座的一侧固定连接。
7、在上述技术方案中,本实用新型提供的技术效果和优点:
8、通过设置双限位功能使得机器人在运行过程中能够有效防止过载和超程,从而提高设备的安全性能,同时该机器人采用支撑条和限位开关的设计,使得限位开关的触点在磨损时可以方便更换,降低维护难度和成本,且该单轴机器人能够避免限位开关与目标物体直接接触,有助于降低干涉现象,保证机器人运行的顺畅性,该双限位式单轴机器人的结构设计简单,易于操作和维护。
技术特征:
1.一种双限位式单轴机器人,包括底座(1),其特征在于:所述底座(1)的前端固定安装有马达座(2),所述底座(1)的尾端固定安装有尾座(3),所述马达座(2)和尾座(3)之间,且位于底座(1)的底部下方设置有支撑条(7),所述支撑条(7)的两端分别设置有限位开关(8);所述底座(1)的横向中心线部位开设有通槽(9),两个所述限位开关(8)分别与底座(1)上的通槽(9)相对应,所述底座(1)上方设置有螺纹座(6),所述螺纹座(6)的底部与限位开关(8)的触头相接触,所述螺纹座(6)的两侧均设置有凸起部(62)。
2.根据权利要求1所述的一种双限位式单轴机器人,其特征在于:所述底座(1)的上方两侧均固定安装有限位条(4),两个所述限位条(4)的内侧均开设有导向槽(41),所述螺纹座(6)的两侧凸起部(62)与两个限位条(4)内侧的导向槽(41)相适配且滑动连接。
3.根据权利要求2所述的一种双限位式单轴机器人,其特征在于:所述螺纹座(6)的两侧且位于凸起部(62)的上方固定安装有防尘片(61),两个所述防尘片(61)分别位于两个限位条(4)的顶部上方。
4.根据权利要求1所述的一种双限位式单轴机器人,其特征在于:所述马达座(2)和尾座(3)之间,且位于底座(1)的上方转动安装有丝杆(5),所述螺纹座(6)螺纹套接在丝杆(5)上,所述丝杆(5)与底座(1)的通槽(9)位置相对应。
5.根据权利要求1所述的一种双限位式单轴机器人,其特征在于:所述尾座(3)的正面下方开设有插孔(31),所述支撑条(7)的一端插设在插孔(31)内,所述支撑条(7)的一端与马达座(2)的一侧固定连接。
技术总结
本技术公开了一种双限位式单轴机器人,涉及机器人技术领域,包括底座,所述底座的前端固定安装有马达座,所述底座的尾端固定安装有尾座,所述马达座和尾座之间,且位于底座的底部下方设置有支撑条,所述支撑条的两端分别设置有限位开关。本技术通过设置双限位功能使得机器人在运行过程中能够有效防止过载和超程,从而提高设备的安全性能,同时该机器人采用支撑条和限位开关的设计,使得限位开关的触点在磨损时可以方便更换,降低维护难度和成本,且该单轴机器人能够避免限位开关与目标物体直接接触,有助于降低干涉现象,保证机器人运行的顺畅性,该双限位式单轴机器人的结构设计简单,易于操作和维护。
技术研发人员:葛瑜
受保护的技术使用者:深圳市龙方自动化科技有限公司
技术研发日:20240423
技术公布日:2024/12/23
- 还没有人留言评论。精彩留言会获得点赞!