一种人形导诊机器人的手臂活动结构
本技术属于医疗辅助装置,具体涉及一种人形导诊机器人的手臂活动结构。
背景技术:
1、导诊机器人是一种医疗机器人,它利用语音识别、屏幕触控、自主避障、自主导航等技术,通过语音、图像、文字等方式与就诊患者进行沟通、指导。导诊机器人可优化就医业务流程、提升医护人员工作效率、改善患者就医体验等,是智慧医疗的重要组成部分;
2、经查公开(公告)号:cn214520214u公开了一种医院导诊机器人,此技术中公开了“包括机器人本体、移动调节装置和录入键盘清洁组件,所述机器人本体包括控制箱、智能导诊平板和录入键盘,所述控制箱底壁开口,所述控制箱内设有第一隔板,所述控制箱内设有第二隔板,所述第二隔板位于所述第一隔板上端技术方案,可以根据具体地使用需要调节移动和固定放置的状态,更加具有操作灵活性技术效果”;
3、虽然该设计可以根据具体地使用需要调节移动和固定放置的状态,更加具有操作灵活性,但是,在实际操作中,导诊机器人有时需要携带一些医疗设备,该机器人没有可以搬取物品的手臂组件,且导诊机器人手臂力量不足会限制其携带物品的种类和数量,甚至可能无法有效地搬动医疗设备和其他物品。
4、为此,设计一种人形导诊机器人的手臂活动结构来解决上述问题。
技术实现思路
1、为解决上述背景技术中提出的问题。本实用新型提供了一种人形导诊机器人的手臂活动结构,通过加入不同半径尺寸的第一齿轮和第二齿轮,具有扭矩放大和减速增力的特性,可以显著提高导诊机器人手臂的举重能力,可以使导诊机器人能够更容易地搬运、移动或操作较重的医疗设备和物品,从而提高工作效率,且第一齿轮和第二齿轮结构紧凑,能够减少机器人手臂内部的力传递损失,通过第一齿轮和第二齿轮的精确传动,可以确保力量从驱动源到手臂末端的传递更加高效和稳定,从而提高导诊机器人的工作准确性和可靠性,解决了传统机器人手臂力量不足会限制其携带物品的种类和数量的问题。
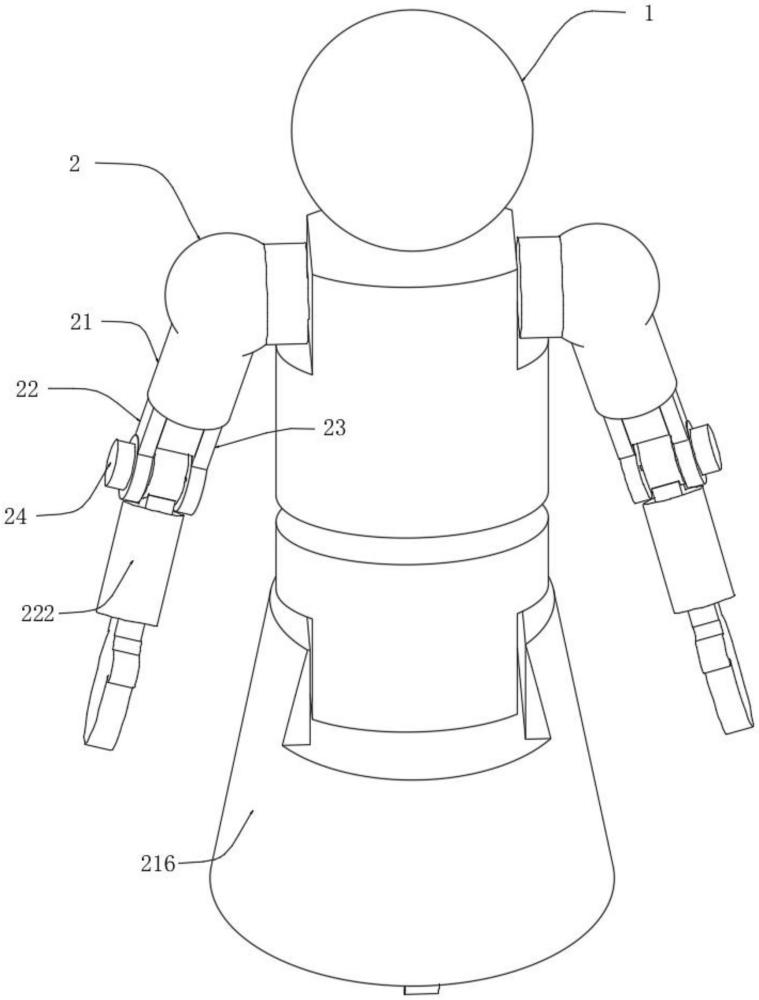
2、为实现上述目的,本实用新型提供如下技术方案:一种人形导诊机器人的手臂活动结构,包括机器人本体,还包括设置在所述机器人本体外侧举重组件;
3、所述举重组件包括第一手臂、第一连接板、第二连接板和第二手臂,所述机器人本体的端部外侧安装有第一手臂,所述第一手臂的端部外表面固定连接有第一连接板和第二连接板,所述第一连接板的端部固定连接有齿轮套,所述第一连接板的一侧安装有驱动电机,所述驱动电机的输出轴端部外侧固定连接有第一齿轮,所述第一齿轮设置于所述第一连接板的端部内侧,所述第一齿轮的外表面啮合连接有若干个第二齿轮,所述第二齿轮的端部外侧转动连接有第一连接杆,所述齿轮套的内表面环形固定连接有若干个齿牙,所述第二齿轮与所述齿牙啮合连接,所述齿轮套和所述第二连接板之间设置有第三连接板,所述第一连接杆的端部外侧与所述第三连接板的一端外表面转动连接,所述第二连接板端部外侧开设的第一插孔内部插设有插杆,所述插杆的端部外侧固定连接有插板,所述第三连接板的端部外侧固定连接有旋转杆,所述第三连接板的端部外侧开设有第二插孔,所述插杆可以贯穿第一插孔延伸至第二插孔内部,所述旋转杆与所述第二连接板端部内侧开设通孔的内壁转动连接,所述第二手臂端部外外侧固定连接有手掌。
4、作为本实用新型一种人形导诊机器人的手臂活动结构优选的,所述机器人本体的端部外侧安装有底座,所述底座为圆台形结构,所述底座的下表面安装有驱动轮。
5、作为本实用新型一种人形导诊机器人的手臂活动结构优选的,所述底座内部安装有伸缩杆,所述伸缩杆的端部外侧固定连接有支撑盘。
6、作为本实用新型一种人形导诊机器人的手臂活动结构优选的,所述支撑盘的端部外表面环形固定连接有多个吸盘。
7、作为本实用新型一种人形导诊机器人的手臂活动结构优选的,所述旋转杆端部外侧环形转动连接有多个滚珠。
8、作为本实用新型一种人形导诊机器人的手臂活动结构优选的,所述手掌端部外侧固定连接有防滑垫。
9、与现有技术相比,本实用新型的有益效果是:在本申请上加入,通过加入不同半径尺寸的第一齿轮和第二齿轮,具有扭矩放大和减速增力的特性,可以显著提高导诊机器人手臂的举重能力,可以使导诊机器人能够更容易地搬运、移动或操作较重的医疗设备和物品,从而提高工作效率,且第一齿轮和第二齿轮结构紧凑,能够减少机器人手臂内部的力传递损失,通过第一齿轮和第二齿轮的精确传动,可以确保力量从驱动源到手臂末端的传递更加高效和稳定,从而提高导诊机器人的工作准确性和可靠性,解决了传统机器人手臂力量不足会限制其携带物品的种类和数量的问题。
技术特征:
1.一种人形导诊机器人的手臂活动结构,包括机器人本体(1),其特征在于:还包括设置在所述机器人本体(1)外侧举重组件(2);
2.根据权利要求1所述的人形导诊机器人的手臂活动结构,其特征在于:所述机器人本体(1)的端部外侧安装有底座(216),所述底座(216)为圆台形结构,所述底座(216)的下表面安装有驱动轮(217)。
3.根据权利要求2所述的人形导诊机器人的手臂活动结构,其特征在于:所述底座(216)内部安装有伸缩杆(220),所述伸缩杆(220)的端部外侧固定连接有支撑盘(218)。
4.根据权利要求3所述的人形导诊机器人的手臂活动结构,其特征在于:所述支撑盘(218)的端部外表面环形固定连接有多个吸盘(219)。
5.根据权利要求1所述的人形导诊机器人的手臂活动结构,其特征在于:所述旋转杆(214)端部外侧环形转动连接有多个滚珠(215)。
6.根据权利要求1所述的人形导诊机器人的手臂活动结构,其特征在于:所述手掌(223)端部外侧固定连接有防滑垫(224)。
技术总结
本技术属于医疗辅助装置技术领域,尤其为一种人形导诊机器人的手臂活动结构,包括机器人本体,还包括设置在所述机器人本体外侧举重组件;所述举重组件包括第一手臂、第一连接板、第二连接板和第二手臂,所述机器人本体的端部外侧安装有第一手臂,所述第一手臂的端部外表面固定连接有第一连接板和第二连接板,所述第一连接板的端部固定连接有齿轮套;通过加入不同半径尺寸的第一齿轮和第二齿轮,具有扭矩放大和减速增力的特性,可以显著提高导诊机器人手臂的举重能力,可以使导诊机器人能够更容易地搬运、移动或操作较重的医疗设备和物品,从而提高工作效率。
技术研发人员:吕滨,贺敬,吕文春,任晓丹,田靖宇,崔畅,张文渊,梁嘉兴,赵国涛,高仕武
受保护的技术使用者:内蒙古机电职业技术学院
技术研发日:20240424
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!