一种高稳定性操作机器人的制作方法
本申请属于电力检测设备,尤其涉及一种高稳定性操作机器人。
背景技术:
1、散粮配电房为散粮装卸泊位的供电保障,承担着电能的输送和分配的功能,其设备的运行状态直接影响着电网的供电质量和可靠性,因此,工作人员对配电室内的设备进行定期的巡检和维护,是保证电力系统正常运行的必要措施。
2、随着电力检测设备技术自动化的进程也在不断加快,如操作机器人等。考虑到码头生产的环境不同,且配电设备多种多样,相关操作机器人的巡检稳定性较差,严重影响操作机器人工作的正常开展。
3、有鉴于此,提出本申请。
技术实现思路
1、本申请提供的一种高稳定性操作机器人,以解决上述至少一项技术问题。
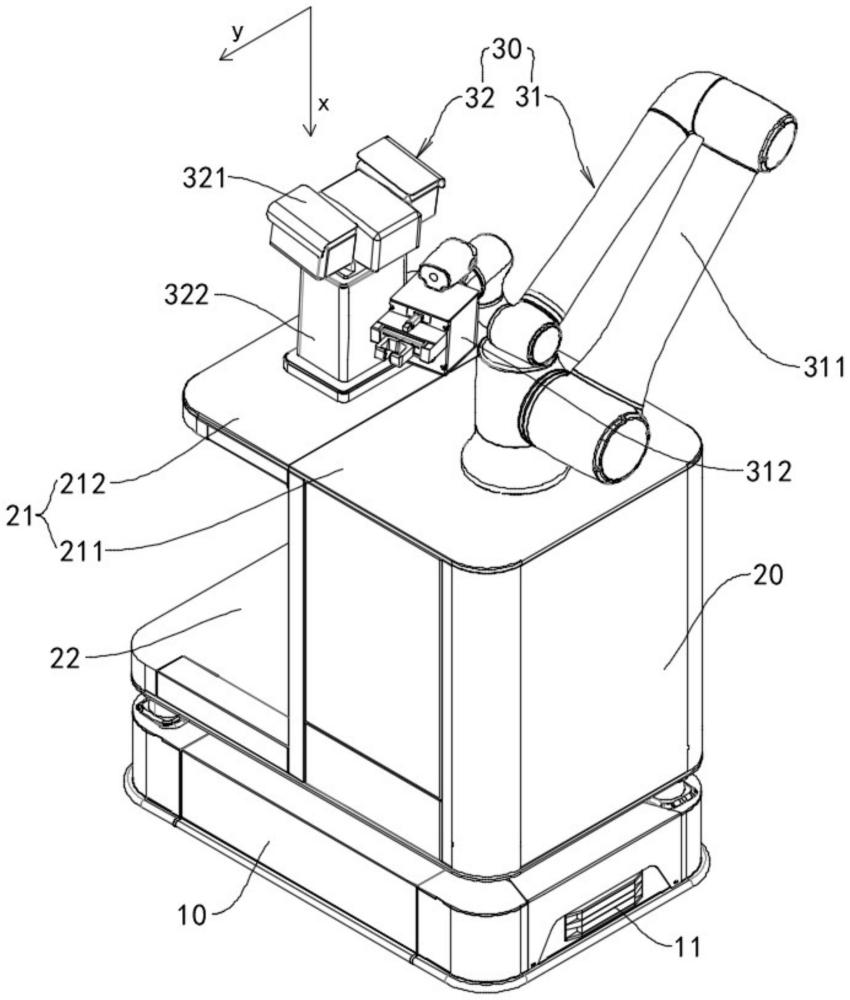
2、本申请实施例提供了一种高稳定性操作机器人,包括移动平台、巡检平台及巡检机构,巡检平台设置于移动平台厚度方向的一侧,巡检平台上远离移动平台的一侧设置有承载台,巡检机构设置于承载台。
3、其中,巡检机构包括图像获取件及操作交互件,图像获取件用于获取图像信息,操作交互件用于交互操作待检测配电柜,承载台包括主台体及升降台,升降台与主台体分离设置,并能够相对于沿第一方向位移,操作交互件设置于主台体,图像获取件设置于升降台,第一方向平行于移动平台的厚度方向。
4、采用上述结构,一方面,通过设置升降台及主台体,能够使承载台上具有相对独立的两个区域,方便图像获取件、操作交互件设置的同时,也降低了图像获取件、操作交互件二者的相互干扰,提高了操作机器人的工作稳定性及效率,另一方面,通过将图像获取件设置于可沿第一方向移动的升降台上,也能够扩大图像信息的获取范围,有利于提高操作机器人的工作质量。
5、在本申请的一些可选实施方式中,巡检平台还包括避让缺口,在第一方向上,升降台与主台体高度相等时,避让缺口位于升降台的下方。
6、采用上述结构,通过设置避让缺口,能够降低巡检平台对升降台的干扰,扩大升降台的可移动范围。
7、在本申请的一些可选实施方式中,巡检平台还包括升降件,升降件包括升降滑轨及升降连接块,升降连接块至少部分设置于升降滑轨内,并能够相对于升降滑轨移动,升降连接块位于升降滑轨外的部分与升降台相连接,升降滑轨设置于巡检平台上面向避让缺口的侧壁。
8、采用上述结构,一方面,通过设置升降滑轨及升降连接块,便于实现升降台的升降功能,另一方面,升降滑轨设置于巡检平台上面向避让缺口的侧壁,能够使升降滑轨在巡检平台上具有较大的接触面积,增强升降件的机械强度。
9、在本申请的一些可选实施方式中,操作交互件包括机械臂及位于机械臂端部的执行夹爪,执行夹爪用于对待检测配电柜执行操作。
10、在本申请的一些可选实施方式中,执行夹爪包括第一半爪、第二半爪及压杆,第一半爪与第二半爪相对设置,并能够相向移动和/或相背移动,以进行夹紧和/或松开动作,压杆可伸缩,以进行按压动作。
11、采用上述结构,通过设置第一半爪、第二半爪及压杆,能够便于操作交互件实现夹取、按压等工作,提高检测效率。
12、在本申请的一些可选实施方式中,第一半爪上远离机械臂的端部可拆卸设置有第一贴合件,第二半爪上远离机械臂的端部可拆卸设置有第二贴合件,第一贴合件与第二贴合件相对设置,执行夹爪夹紧时,第一贴合件与第二贴合件至少部分相抵接。
13、采用上述结构,通过设置可拆卸的第一贴合件与第二贴合件,能够便于调整操作交互件上与待检测配电柜相接触的部分,便于操作人员根据实际工作环境,进行灵活更换,有利于提高机器人的普适性。
14、在本申请的一些可选实施方式中,第一贴合件上设置有第一适配槽,第二贴合件上设置有第二适配槽,第一适配槽与第二适配槽上至少部分与待检测配电柜上的旋钮相配合。
15、采用上述结构,通过设置第一适配槽与第二适配槽,能够增大第一贴合件及第二贴合件与待检测配电柜上旋钮间的接触面积,从而增强抵接时的稳定性。
16、在本申请的一些可选实施方式中,第一贴合件与第二贴合件采用柔性材质。
17、在本申请的一些可选实施方式中,图像获取件包括底座及云台相机,底座与升降台相连接,云台相机设置于底座上远离升降台的一侧,云台相机能够相对于底座转动。
18、采用上述结构,通过设置底座,首先,能够使云台相机与承载台间相对独立,降低承载台上结构对云台相机的干扰,其次,能够使云台相机远离大面积的平面结构,提高云台相机的成像面积。
19、在本申请的一些可选实施方式中,底座上设置有声纹传感器,用于检测配电柜的仪器是否发出异响。
20、在本申请的一些可选实施方式中,移动平台上远离所述巡检平台的一侧设置驱动轮,驱动轮用于驱动所述移动平台位移。
21、在本申请的一些可选实施方式中,驱动轮设置有多个,且每个驱动轮单独配置有伺服电机,用于提供驱动力。
22、采用上述结构,通过使每个驱动轮单独配置有伺服电机,能够提高移动平台的运行精度。
23、在本申请的一些可选实施方式中,移动平台上还设置有充电对接口,充电对接口用于与外部电源相连接。
24、与相关技术相比,本申请实施方式的高稳定性操作机器人中,一方面,通过设置升降台及主台体,能够使承载台上具有相对独立的两个区域,方便图像获取件、操作交互件设置的同时,也降低了图像获取件、操作交互件二者的相互干扰,提高了操作机器人的工作稳定性及效率,另一方面,通过将图像获取件设置于可沿第一方向移动的升降台上,也能够扩大图像信息的获取范围,有利于提高操作机器人的工作质量。
技术特征:
1.一种高稳定性操作机器人,其特征在于,包括:
2.根据权利要求1所述的高稳定性操作机器人,其特征在于,所述巡检平台还包括避让缺口,在所述第一方向上,所述升降台与所述主台体高度相等时,所述避让缺口位于所述升降台的下方。
3.根据权利要求2所述的高稳定性操作机器人,其特征在于,所述巡检平台还包括升降件,所述升降件包括升降滑轨及升降连接块,所述升降连接块至少部分设置于所述升降滑轨内,并能够相对于所述升降滑轨移动,所述升降连接块位于所述升降滑轨外的部分与所述升降台相连接,所述升降滑轨设置于所述巡检平台上面向所述避让缺口的侧壁。
4.根据权利要求1所述的高稳定性操作机器人,其特征在于,所述操作交互件包括机械臂及位于所述机械臂端部的执行夹爪,所述执行夹爪用于对所述待检测配电柜执行操作。
5.根据权利要求4所述的高稳定性操作机器人,其特征在于,所述执行夹爪包括第一半爪、第二半爪及压杆,所述第一半爪与所述第二半爪相对设置,并能够相向移动和/或相背移动,以进行夹紧和/或松开动作,所述压杆可伸缩,以进行按压动作。
6.根据权利要求5所述的高稳定性操作机器人,其特征在于,所述第一半爪上远离所述机械臂的端部可拆卸设置有第一贴合件,所述第二半爪上远离所述机械臂的端部可拆卸设置有第二贴合件,所述第一贴合件与所述第二贴合件相对设置,所述执行夹爪夹紧时,所述第一贴合件与所述第二贴合件至少部分相抵接。
7.根据权利要求6所述的高稳定性操作机器人,其特征在于,所述第一贴合件上设置有第一适配槽,所述第二贴合件上设置有第二适配槽,所述第一适配槽与所述第二适配槽上至少部分与所述待检测配电柜上的旋钮相配合。
8.根据权利要求6所述的高稳定性操作机器人,其特征在于,所述第一贴合件与所述第二贴合件采用柔性材质。
9.根据权利要求1所述的高稳定性操作机器人,其特征在于,所述图像获取件包括底座及云台相机,所述底座与所述升降台相连接,所述云台相机设置于所述底座上远离所述升降台的一侧,所述云台相机能够相对于所述底座转动。
10.根据权利要求1-9任一项所述的高稳定性操作机器人,其特征在于,所述移动平台上还设置有充电对接口,所述充电对接口用于与外部电源相连接。
技术总结
本申请提供了一种高稳定性操作机器人,包括移动平台、巡检平台及巡检机构,巡检平台设置于移动平台厚度方向的一侧,巡检平台上远离移动平台的一侧设置有承载台,巡检机构设置于承载台。其中,巡检机构包括图像获取件及操作交互件,图像获取件用于获取图像信息,操作交互件用于交互操作待检测配电柜,承载台包括主台体及升降台,升降台与主台体分离设置,并能够相对于沿第一方向位移,操作交互件设置于主台体,图像获取件设置于升降台,第一方向平行于移动平台的厚度方向。通过设置升降台及主台体,能够使承载台上具有相对独立的两个区域,方便图像获取件、操作交互件设置的同时,也降低了二者的相互干扰,提高了操作机器人的工作稳定性。
技术研发人员:刘千波,和海宁,李威,毛磊,张勇,张桂昌,曾跃滨,卫才望
受保护的技术使用者:广州港股份有限公司南沙粮食通用码头分公司
技术研发日:20240511
技术公布日:2025/2/27
- 还没有人留言评论。精彩留言会获得点赞!