一种多自由度工业机械臂
本技术涉及机械臂,具体涉及一种多自由度工业机械臂。
背景技术:
1、机械臂可把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一工业生产的作业要求。工业机械臂具有效率高、稳定性好、重复定位性高、能在高危环境下作业等优点。
2、现有的工业机械臂一般通过机械手臂与末端执行器相配合进行抓取,但是机械臂伸展高度不足,转动角度受限,使用不够方便,存在机械臂不易到达的抓取死角,降低了机器人的使用范围,且负载突变情况下机械臂受损,使用寿命降低,易发生安全问题。
技术实现思路
1、为了解决上述现有技术中存在的问题,提供了一种多自由度工业机械臂。本装置操作方便,具有多自由度,同时机械臂更加灵活,可有效增加机械臂的抓取范围,且安全性能高,可有效减少负载突变情况下机械臂的受损程度。
2、本实用新型解决其技术问题所采用的技术方案是:
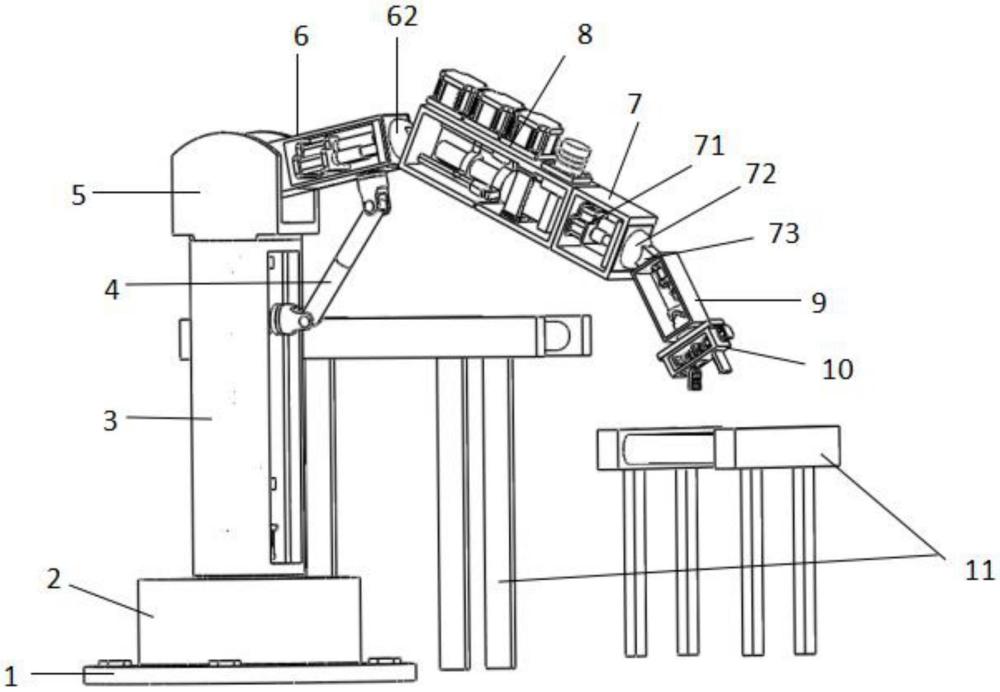
3、本实用新型提出了一种多自由度工业机械臂,包括底座,所述底座转动连接有支撑臂,所述支撑臂转动连接有大臂,所述大臂通过第一球关节连接有小臂,所述小臂可拆卸连接有连接臂,所述连接臂通过第二球关节连接有旋转臂;所述旋转臂转动连接有夹具,所述夹具连接有可对工件进行夹持的固定夹爪和活动夹爪;还包括有控制机械臂工作的控制器。
4、优选的,所述底座固定连接有可驱动支撑臂转动的第一电机,所述第一电机和所述支撑臂相连,所述第一电机和所述控制器相连。
5、优选的,所述支撑臂转动连接有竖直方向设置的丝杠,所述丝杠配合设置有丝母,所述丝母铰接有辅助臂,所述辅助臂另一端和所述大臂铰接。
6、优选的,所述支撑臂固定连接有可驱动丝杠转动的第二电机,所述丝杠和所述第二电机相连,所述第二电机和所述控制器相连,所述丝母和所述支撑臂滑动连接。
7、优选的,所述夹具转动连接有夹持丝杆,所述夹持丝杆配合设置有夹持丝母,所述夹持丝母和所述夹具滑动连接,所述夹持丝母通过转轴和活动夹爪转动连接。
8、优选的,所述夹具固定连接有可驱动夹持丝杆转动的第四电机,所述夹具还固定连接有可驱动活动夹爪绕转轴转动的第三电机,所述第三电机和第四电机均与所述控制器相连。
9、优选的,所述旋转臂连接有第三气缸,所述第三气缸连接有移动杆,所述移动杆固定连接有滑块,所述夹具同轴固定连接有桶形凸轮,所述桶形凸轮开设有滑槽,所述滑块滑动设置在所述滑槽内,所述第三气缸和所述控制器相连。
10、优选的,所述大臂连接有第一气缸,所述第一气缸铰接有连杆,所述连杆另一端铰接有第一关节杆,所述第一关节杆和所述小臂固定连接,所述第一关节杆和所述第一球关节滑动连接,所述第一气缸和所述控制器相连。
11、优选的,所述连接臂连接有第二气缸,所述第二气缸铰接有连杆,所述连杆另一端铰接有第二关节杆,所述第二关节杆和所述旋转臂固定连接,所述第二关节杆和所述第二球关节滑动连接,所述第二气缸和所述控制器相连。
12、优选的,所述小臂内设置有可对小臂进行支撑的支架,所述小臂内连接有可对支架进行夹持的夹板和对支架进行吸附的电磁吸盘,所述小臂连接有可对负载进行检测的力矩传感器,所述电磁吸盘和力矩传感器均与所述控制器相连。
13、与现有技术相比,本实用新型的有益效果是:
14、1.本实用新型设置通过设置的支撑臂增加装置高度,通过设置辅助臂机构,利用丝杠带动丝母移动,从而带动辅助臂上下移动以实现大臂的角度变换,电机正转使得大臂抬高,电机反转使得大臂降低,丝杠在运动过程中能够稳定、精确地实现位置控制,保证了机械臂良好的姿态稳定性和高运动精度,提高机械臂的伸展高度与抓取范围。
15、2.本实用新型中设置有第一和第二球关节,利用第一和第二气缸的不同时伸缩运动可以带动小臂绕大臂活动,旋转臂绕连接臂活动,实现空间角度变换,可以带动小臂及旋转臂的非水平面内的上下左右角度变换,机械臂转动角度灵活多变,有效提高了装置的灵活性,减少了抓取死角。
16、3.本实用新型设置有支架,可对由负载突变产生的飞车现象进行防护,当力矩传感器检测到负载异常时,机械臂运行速度降低,电磁吸盘得电产生磁力吸附支架,同时夹板松开,支架伸直至地面,机械臂保持水平伸直状态,降低了由于负载突变造成的机械臂受损、使用寿命降低问题的发生,提高了装置的安全性与稳定性。
17、4.本实用新型设置有夹持丝杆,夹持丝杆转动可带动夹持丝母移动,夹持丝母可带动活动夹爪移动,同时电机又可带动活动夹爪绕转轴转动,可实现对工件的灵活夹持,设置的防滑垫可起到防滑的作用,提高夹持工件时的稳定性,通过丝杆的传动方式,可使夹持传动更加平稳,提高了夹持的精度。
技术特征:
1.一种多自由度工业机械臂,包括底座(1),其特征在于,所述底座(1)转动连接有支撑臂(3),所述支撑臂(3)转动连接有大臂(6),所述大臂(6)通过第一球关节(62)连接有小臂(8),所述小臂(8)可拆卸连接有连接臂(7),所述连接臂(7)通过第二球关节(72)连接有旋转臂(9);所述旋转臂(9)转动连接有夹具(10),所述夹具(10)连接有可对工件进行夹持的固定夹爪(14)和活动夹爪(15);还包括有控制机械臂工作的控制器。
2.根据权利要求1所述的一种多自由度工业机械臂,其特征在于,所述底座(1)固定连接有可驱动支撑臂(3)转动的第一电机(2),所述第一电机(2)和所述支撑臂(3)相连,所述第一电机(2)和所述控制器相连。
3.根据权利要求1所述的一种多自由度工业机械臂,其特征在于,所述支撑臂(3)转动连接有竖直方向设置的丝杠(32),所述丝杠(32)配合设置有丝母(33),所述丝母(33)铰接有辅助臂(4),所述辅助臂(4)另一端和所述大臂(6)铰接。
4.根据权利要求3所述的一种多自由度工业机械臂,其特征在于,所述支撑臂(3)固定连接有可驱动丝杠(32)转动的第二电机(31),所述丝杠(32)和所述第二电机(31)相连,所述第二电机(31)和所述控制器相连,所述丝母(33)和所述支撑臂(3)滑动连接。
5.根据权利要求1所述的一种多自由度工业机械臂,其特征在于,所述夹具(10)转动连接有夹持丝杆(19),所述夹持丝杆(19)配合设置有夹持丝母(18),所述夹持丝母(18)和所述夹具(10)滑动连接,所述夹持丝母(18)通过转轴(17)和活动夹爪(15)转动连接。
6.根据权利要求5所述的一种多自由度工业机械臂,其特征在于,所述夹具(10)固定连接有可驱动夹持丝杆(19)转动的第四电机(13),所述夹具(10)还固定连接有可驱动活动夹爪(15)绕转轴(17)转动的第三电机(12),所述第三电机(12)和第四电机(13)均与所述控制器相连。
7.根据权利要求1所述的一种多自由度工业机械臂,其特征在于,所述旋转臂(9)连接有第三气缸(91),所述第三气缸(91)连接有移动杆(92),所述移动杆(92)固定连接有滑块(94),所述夹具(10)同轴固定连接有桶形凸轮(93),所述桶形凸轮(93)开设有滑槽,所述滑块(94)滑动设置在所述滑槽内,所述第三气缸(91)和所述控制器相连。
8.根据权利要求1所述的一种多自由度工业机械臂,其特征在于,所述大臂(6)连接有第一气缸(61),所述第一气缸(61)铰接有连杆,所述连杆另一端铰接有第一关节杆(63),所述第一关节杆(63)和所述小臂(8)固定连接,所述第一关节杆(63)和所述第一球关节(62)滑动连接,所述第一气缸(61)和所述控制器相连。
9.根据权利要求1所述的一种多自由度工业机械臂,其特征在于,所述连接臂(7)连接有第二气缸(71),所述第二气缸(71)铰接有连杆,所述连杆另一端铰接有第二关节杆(73),所述第二关节杆(73)和所述旋转臂(9)固定连接,所述第二关节杆(73)和所述第二球关节(72)滑动连接,所述第二气缸(71)和所述控制器相连。
10.根据权利要求1所述的一种多自由度工业机械臂,其特征在于,所述小臂(8)内设置有可对小臂(8)进行支撑的支架(86),所述小臂(8)内连接有可对支架(86)进行夹持的夹板(88)和对支架(86)进行吸附的电磁吸盘(89),所述小臂(8)连接有可对负载进行检测的力矩传感器(84),所述电磁吸盘(89)和力矩传感器(84)均与所述控制器相连。
技术总结
本技术提出了一种多自由度工业机械臂,包括底座,底座转动连接有支撑臂,支撑臂转动连接有大臂,大臂通过第一球关节连接有小臂,小臂可拆卸连接有连接臂,连接臂通过第二球关节连接有旋转臂;旋转臂转动连接有夹具,夹具连接有可对工件进行夹持的固定夹爪和活动夹爪;还包括有控制机械臂工作的控制器。本装置操作方便,具有多自由度,同时机械臂更加灵活,可有效增加机械臂的抓取范围,且安全性能高,可有效减少负载突变情况下机械臂的受损程度。
技术研发人员:殷珊珊,管志光
受保护的技术使用者:山东交通学院
技术研发日:20240513
技术公布日:2024/12/23
- 还没有人留言评论。精彩留言会获得点赞!