一种模块化组装机器人的制作方法
本技术涉及机器人,尤其涉及一种模块化组装机器人。
背景技术:
1、随着工业自动化和智能化的发展,机器人技术已成为制造业不可或缺的一部分。目前,市场上已经存在一些用于组装作业的机器人,但是多数都采用整体式设计,结构复杂且不易扩展,此外,整体式设计的机器人在出现故障时,也需要进行整体维修或更换,进一步增加了维护的成本,而且整体式设计的机器人在搬运存放时,所占的空间也更大。
2、为此,我们提出一种零件可拆的模块化组装机器人。
技术实现思路
1、为了克服整体式设计的机器人结构复杂且不易扩展,不便进行更换维护,切存放运输占用空间大的缺点,本实用新型提供一种零件可拆的模块化组装机器人。
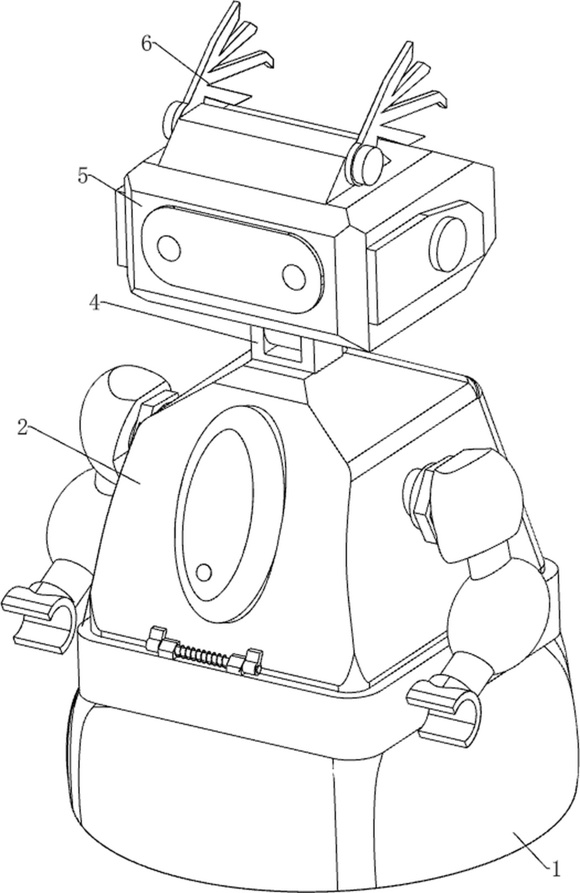
2、一种模块化组装机器人,包括有底座,底座顶端滑动连接有拆卸式的机身,机身顶端转动式连接有第一对接套,第一对接套内滑动连接有拆卸式的连接块,连接块顶端转动式连接有机械头部,机械头部的顶端转动式连接有横向对称的旋转片,机身内固定连接有第一双轴电机,第一双轴电机两侧的输出轴上均固定连接有连接件,连接件上固定连接有第二对接套,第二对接套内滑动连接有拆卸式的机械手臂。
3、在其中一个实施例中,还包括有第二双轴电机,第二双轴电机固定连接于底座内,第二双轴电机两侧的输出轴上均固定连接有车轮,底座内固定连接有转向电机,转向电机的输出轴上转动式连接有转向轮。
4、在其中一个实施例中,还包括有卡架,卡架转动式连接于底座顶端,卡架与底座之间连接有第一扭簧。
5、在其中一个实施例中,机身上开有与卡架配合的卡槽。
6、在其中一个实施例中,还包括有存放盒,存放盒固定连接于机身,存放盒上转动式连接有挡板,挡板与存放盒之间连接有第二扭簧。
7、在其中一个实施例中,还包括有把手,把手固定连接于挡板。
8、本实用新型具有如下优点:1、将机械手臂从第二对接套上抽出进行拆卸,将连接块从第一对接套上抽出便可对机械头部进行拆卸,然后再将机身从底座上抽出拆卸,此时本装置拆卸成五个部分,以便进行存放运输,同时,也方便对拆卸的部件进行更换维护。
9、2、第二双轴电机运作带动车轮转动以驱动本装置前后移动,而转向电机运作带动转向轮转动可进行换向,自由改变本装置的移动方向。
10、3、卡架卡入机身的卡槽内,能够固定机身和底座,确保机身和底座连接的稳定性。
11、4、物品可存放入存放盒内,通过挡板向前转动将物品固定在存放盒内。
技术特征:
1.一种模块化组装机器人,其特征在于:包括有底座(1),底座(1)顶端滑动连接有拆卸式的机身(2),机身(2)顶端转动式连接有第一对接套(3),第一对接套(3)内滑动连接有拆卸式的连接块(4),连接块(4)顶端转动式连接有机械头部(5),机械头部(5)的顶端转动式连接有横向对称的旋转片(6),机身(2)内固定连接有第一双轴电机(7),第一双轴电机(7)两侧的输出轴上均固定连接有连接件(8),连接件(8)上固定连接有第二对接套(9),第二对接套(9)内滑动连接有拆卸式的机械手臂(10)。
2.如权利要求1所述的一种模块化组装机器人,其特征在于:还包括有第二双轴电机(11),第二双轴电机(11)固定连接于底座(1)内,第二双轴电机(11)两侧的输出轴上均固定连接有车轮(12),底座(1)内固定连接有转向电机(13),转向电机(13)的输出轴上转动式连接有转向轮(14)。
3.如权利要求2所述的一种模块化组装机器人,其特征在于:还包括有卡架(15),卡架(15)转动式连接于底座(1)顶端,卡架(15)与底座(1)之间连接有第一扭簧(16)。
4.如权利要求3所述的一种模块化组装机器人,其特征在于:机身(2)上开有与卡架(15)配合的卡槽。
5.如权利要求4所述的一种模块化组装机器人,其特征在于:还包括有存放盒(17),存放盒(17)固定连接于机身(2),存放盒(17)上转动式连接有挡板(18),挡板(18)与存放盒(17)之间连接有第二扭簧(19)。
6.如权利要求5所述的一种模块化组装机器人,其特征在于:还包括有把手(20),把手(20)固定连接于挡板(18)。
技术总结
本技术公开了一种模块化组装机器人,涉及机器人技术领域。本技术提供一种零件可拆的模块化组装机器人,包括有底座,底座顶端滑动连接有拆卸式的机身,机身顶端转动式连接有第一对接套,第一对接套内滑动连接有拆卸式的连接块,连接块顶端转动式连接有机械头部,机械头部的顶端转动式连接有横向对称的旋转片,机身内固定连接有第一双轴电机,第一双轴电机两侧的输出轴上均固定连接有连接件。将机械手臂从第二对接套上抽出进行拆卸,将连接块从第一对接套上抽出便可对机械头部进行拆卸,然后再将机身从底座上抽出拆卸,此时本装置拆卸成五个部分,以便进行存放运输,同时,也方便对拆卸的部件进行更换维护。
技术研发人员:杨威
受保护的技术使用者:深圳市机器时代科技有限公司
技术研发日:20240516
技术公布日:2024/12/26
- 还没有人留言评论。精彩留言会获得点赞!