一种无序分拣机器人用的吸料末端执行器
本技术涉及机器人分拣,尤其涉及一种无序分拣机器人用的吸料末端执行器。
背景技术:
1、随着科技的发展和智能制造产业的进步,机器视觉的应用越来越广泛。常见的机器视觉根据工作原理,可以分为二维视觉和3d视觉。在一些较为复杂的分拣作业工况场景中,需要3d视觉和工业机器人配合完成无序分拣。所述的无序分拣机器人在工作时,在3d视觉的引导下,从无序排列的工件或物品堆垛中逐一分拣出工件或物品,并有序放置在指定位置。上述工作中,往往需要用到吸料末端执行器。常见的吸料末端执行器由于刚性结构问题,若抓取的点位不够精确,造成吸盘与零部件或物品接触并受力不均或受力过大时,会影响吸盘对物品的吸力,容易出现掉件问题,吸盘与物件的碰撞接触也容易损伤吸盘。
技术实现思路
1、本实用新型提供一种无序分拣机器人用的吸料末端执行器,旨在解决现有是吸料末端执行器在抓取点位不准确时容易掉件的问题。
2、本实用新型提供一种无序分拣机器人用的吸料末端执行器,包括连接支架、吸盘、进气结构、压缩件及气动结构,所述进气结构设置在所述连接支架,所述连接支架的一端与分拣机器人的末端连接,所述气动结构的输入端与气源连接,所述气动结构的输出端与所述进气结构的输入端连接,所述压缩件的一端与所述进气结构的输出端连接,所述压缩件的另一端与所述吸盘连接。
3、作为本实用新型的进一步改进,所述连接支架包括连接杆、固定法兰及固定板,所述固定法兰通过螺栓安装在所述连接杆的一端,所述固定法兰与分拣机器人的末端连接,所述固定板设置在所述连接杆的另一端。
4、作为本实用新型的进一步改进,所述进气结构包括进气接头、导向螺管及真空引导管,所述固定板设有安装孔,所述导向螺管设置在所述安装孔中,且所述导向螺管的一端凸出所述安装孔设置,所述真空引导管设置在所述导向螺管内部且在所述导向螺管内上下滑动,所述进气接头卡接在所述导向螺管的另一端,所述进气接头的一端与所述气动结构的输出端连接,所述进气接头的另一端与所述真空引导管的一端连接,所述真空引导管的另一端与所述吸盘连接。
5、作为本实用新型的进一步改进,所述安装孔的两端均设有薄螺母,所述薄螺母抵接在所述导向螺管的外围。
6、作为本实用新型的进一步改进,还包括挡环,所述挡环的一端与所述导向螺管的一端连接,所述挡环的另一端与所述压缩件的一端连接。
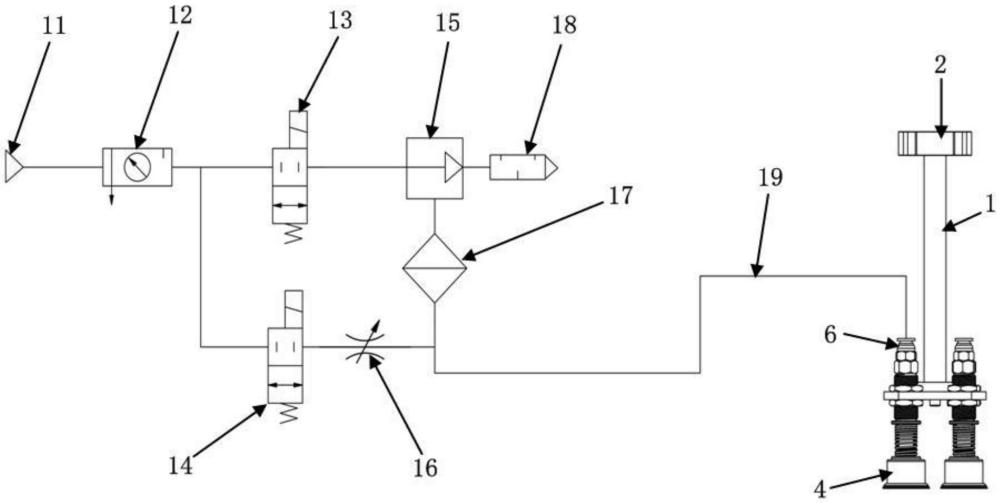
7、作为本实用新型的进一步改进,所述气动结构包括气动三联件、第一电磁换向阀、第二电磁换向阀、节流阀、真空发生器及输出气管,所述气动三联件的输入端与所述气源连接,所述气动三联件的一个输出端与所述第一电磁换向阀的输入端连接,所述第一电磁换向阀的输出端与所述真空发生器的输入端连接,所述真空发生器的输出端与所述输出气管连接,所述气动三联件的另一个输出端与所述第二电磁换向阀的输入端连接,所述第二电磁换向阀的输出端与所述节流阀的输入端连接,所述节流阀的输出端与所述输出气管连接,所述输出气管的输出端与所述进气结构的输入端连接。
8、作为本实用新型的进一步改进,所述真空发生器的输出端与真空过滤器的输入端连接,所述真空过滤器的输出端与所述输出气管的输入端连接。
9、作为本实用新型的进一步改进,所述真空发生器上设置有消声器。
10、作为本实用新型的进一步改进,当所述吸盘吸取物料时,所述第一电磁换向阀得电,所述第一电磁换向阀失电,所述气源输出的压缩气体依次经过所述气动三联件、第一电磁换向阀、真空发生器及输出气管,所述输出气管输出压缩气体至所述进气结构的输入端。
11、作为本实用新型的进一步改进,当所述吸盘放下物料时,所述第一电磁换向阀失电,所述第二电磁换向阀得电,所述气源输出的压缩气体依次经过所述气动三联件、第二电磁换向阀、节流阀及输出气管,所述输出气管输出压缩气体至所述进气结构的输入端。
12、本实用新型的有益效果是:当无序分拣机器人吸取或放置零部件或物品时,若点位不够精确,造成吸盘与零部件或物品接触并受力不均或受力过大时,压缩件被不同程度地进一步压缩,确保吸盘与零部件或物品表面呈近似平面状,从而保存真空负压的吸力相对稳定,同时避免吸料末端执行器系统与零部件或物品刚性接触,造成不必要的零部件或物品和吸料末端执行器的零部件损坏。
技术特征:
1.一种无序分拣机器人用的吸料末端执行器,其特征在于,包括连接支架、吸盘、进气结构、压缩件及气动结构,所述进气结构设置在所述连接支架,所述连接支架的一端与分拣机器人的末端连接,所述气动结构的输入端与气源连接,所述气动结构的输出端与所述进气结构的输入端连接,所述压缩件的一端与所述进气结构的输出端连接,所述压缩件的另一端与所述吸盘连接。
2.根据权利要求1所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,所述连接支架包括连接杆、固定法兰及固定板,所述固定法兰通过螺栓安装在所述连接杆的一端,所述固定法兰与分拣机器人的末端连接,所述固定板设置在所述连接杆的另一端。
3.根据权利要求2所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,所述进气结构包括进气接头、导向螺管及真空引导管,所述固定板设有安装孔,所述导向螺管设置在所述安装孔中,且所述导向螺管的一端凸出所述安装孔设置,所述真空引导管设置在所述导向螺管内部且在所述导向螺管内上下滑动,所述进气接头卡接在所述导向螺管的另一端,所述进气接头的一端与所述气动结构的输出端连接,所述进气接头的另一端与所述真空引导管的一端连接,所述真空引导管的另一端与所述吸盘连接。
4.根据权利要求3所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,所述安装孔的两端均设有薄螺母,所述薄螺母抵接在所述导向螺管的外围。
5.根据权利要求3所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,还包括挡环,所述挡环的一端与所述导向螺管的一端连接,所述挡环的另一端与所述压缩件的一端连接。
6.根据权利要求1所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,所述气动结构包括气动三联件、第一电磁换向阀、第二电磁换向阀、节流阀、真空发生器及输出气管,所述气动三联件的输入端与所述气源连接,所述气动三联件的一个输出端与所述第一电磁换向阀的输入端连接,所述第一电磁换向阀的输出端与所述真空发生器的输入端连接,所述真空发生器的输出端与所述输出气管连接,所述气动三联件的另一个输出端与所述第二电磁换向阀的输入端连接,所述第二电磁换向阀的输出端与所述节流阀的输入端连接,所述节流阀的输出端与所述输出气管连接,所述输出气管的输出端与所述进气结构的输入端连接。
7.根据权利要求6所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,所述真空发生器的输出端与真空过滤器的输入端连接,所述真空过滤器的输出端与所述输出气管的输入端连接。
8.根据权利要求6所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,所述真空发生器上设置有消声器。
9.根据权利要求6所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,当所述吸盘吸取物料时,所述第一电磁换向阀得电,所述第一电磁换向阀失电,所述气源输出的压缩气体依次经过所述气动三联件、第一电磁换向阀、真空发生器及输出气管,所述输出气管输出压缩气体至所述进气结构的输入端。
10.根据权利要求6所述的一种无序分拣机器人用的吸料末端执行器,其特征在于,当所述吸盘放下物料时,所述第一电磁换向阀失电,所述第二电磁换向阀得电,所述气源输出的压缩气体依次经过所述气动三联件、第二电磁换向阀、节流阀及输出气管,所述输出气管输出压缩气体至所述进气结构的输入端。
技术总结
本技术涉及一种无序分拣机器人用的吸料末端执行器,包括连接支架、吸盘、进气结构、压缩件及气动结构,进气结构设置在连接支架,连接支架的一端与分拣机器人的末端连接,气动结构的输入端与气源连接,气动结构的输出端与进气结构的输入端连接,压缩件的一端与进气结构的输出端连接,压缩件的另一端与吸盘连接。当无序分拣机器人吸取或放置零部件或物品时,若点位不够精确,压缩件被不同程度地进一步压缩,确保吸盘与零部件或物品表面呈近似平面状,从而保存真空负压的吸力相对稳定,同时避免吸料末端执行器系统与零部件或物品刚性接触,造成不必要的零部件或物品和吸料末端执行器的零部件损坏。
技术研发人员:韩宇,杨志贤,曾宇军,肖耀华,赖嘉玮,金翰庭
受保护的技术使用者:深圳技师学院(深圳高级技工学校)
技术研发日:20240520
技术公布日:2025/1/2
- 还没有人留言评论。精彩留言会获得点赞!