一种实现碗筷抓取的夹爪的制作方法
本技术涉及智能餐厅,具体是一种实现碗筷抓取的夹爪。
背景技术:
1、随着现在人工智能餐厅的不断发展,餐厅结合了先进的人工智能技术和餐饮服务的创新型业态;餐厅利用各类智能设备、机器学习和自然语言处理等技术,提升了餐饮服务效率和顾客体验,其中自动处理倒菜、投调味料和菜盘取放;实现了单台机器人可完成多个复杂动作;这就需要机器人配合夹爪来完成。
2、然而现在的智能餐厅所使用的机器人往往都是采用单独的夹爪对碗筷分别夹取,即机器人的每个机械臂上只有一种夹爪,当需要对碗筷进行夹取时,需要使用多种夹爪,操作不方便。
技术实现思路
1、本实用新型的目的在于提供一种实现碗筷抓取的夹爪,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
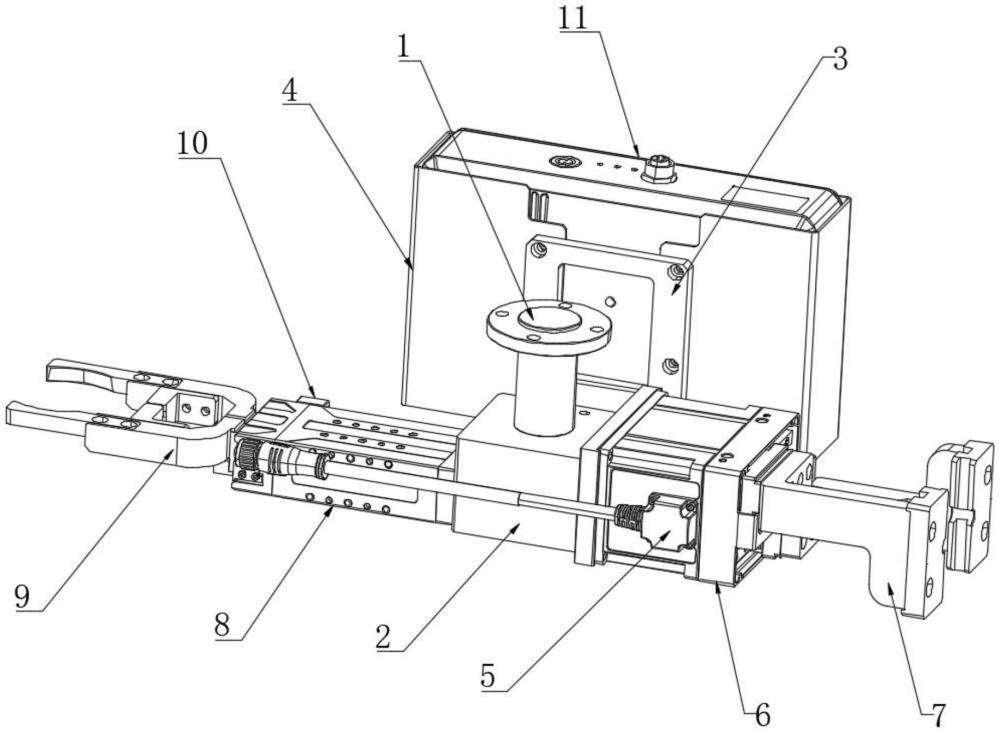
3、一种实现碗筷抓取的夹爪,包括转换头,固定在转换头一端的第二电爪,以及固定在转换头另一端的第一电爪,所述第二电爪的一端安装有碗盘抓手,且在第二电爪的后侧固定连接有第二接线头,所述第一电爪的一端安装有筷子抓手,且在第一电爪的前侧固定连接有第一接线头,所述转换头的上端固定连接有机器人快换盘;且在机器人快换盘的后侧固定连接有相机安装座,所述相机安装座的后侧固定连接有相机罩,所述相机罩的内侧安装有3d相机。
4、作为本实用新型再进一步的方案:所述碗盘抓手包括碗盘左手指,以及与碗盘左手指相匹配的碗盘右手指,所述碗盘左手指的一端设置有碗盘左夹紧块,且在碗盘左手指的另一端设置有碗盘左滑块,所述碗盘右手指的一端设置有碗盘右夹紧块,且在碗盘右手指的另一端设置有碗盘右滑块,所述碗盘左滑块和碗盘右滑块均与第二电爪相连接。
5、作为本实用新型再进一步的方案:所述碗盘左手指的内侧安装有碗盘左定位块,所述碗盘右手指的内侧安装有与碗盘左定位块相对应的碗盘右定位块。
6、作为本实用新型再进一步的方案:所述碗盘左夹紧块和碗盘右夹紧块均为食品级聚丙烯材料的构件。
7、作为本实用新型再进一步的方案:所述筷子抓手包括筷子左手指,以及与筷子左手指相匹配的筷子右手指,所述筷子左手指的一端固定连接有筷子左滑块,且在筷子左手指的另一端固定连接有筷子左夹紧块,所述筷子右手指的一端固定连接有筷子右滑块,且在筷子左手指的另一端固定连接有筷子右夹紧块,所述筷子左滑块和筷子右滑块均与第一电爪相连接。
8、作为本实用新型再进一步的方案:所述筷子左夹紧块和筷子右夹紧块均为食品级聚丙烯材料的构件。
9、与现有技术相比,本实用新型的有益效果:
10、本实用新型通过第一电爪控制筷子抓手,可以对筷子进行夹取;通过第二电爪控制碗盘抓手可以对碗盘进行夹取;从而实现了了一个夹爪可以同时夹取筷子和碗盘,操作方便;通过3d相机进行视觉采集,以确定碗盘和筷子的位置,可以实现碗盘抓手和筷子抓手精准地对碗盘和筷子的夹取;提高了自动化、智能化程度。
技术特征:
1.一种实现碗筷抓取的夹爪,包括转换头(2),固定在转换头(2)一端的第二电爪(8),以及固定在转换头(2)另一端的第一电爪(6),其特征在于,所述第二电爪(8)的一端安装有碗盘抓手(9),且在第二电爪(8)的后侧固定连接有第二接线头(10),所述第一电爪(6)的一端安装有筷子抓手(7),且在第一电爪(6)的前侧固定连接有第一接线头(5),所述转换头(2)的上端固定连接有机器人快换盘(1);且在机器人快换盘(1)的后侧固定连接有相机安装座(3),所述相机安装座(3)的后侧固定连接有相机罩(4),所述相机罩(4)的内侧安装有3d相机(11)。
2.根据权利要求1所述的一种实现碗筷抓取的夹爪,其特征在于,所述碗盘抓手(9)包括碗盘左手指(91),以及与碗盘左手指(91)相匹配的碗盘右手指(92),所述碗盘左手指(91)的一端设置有碗盘左夹紧块(95),且在碗盘左手指(91)的另一端设置有碗盘左滑块(97),所述碗盘右手指(92)的一端设置有碗盘右夹紧块(96),且在碗盘右手指(92)的另一端设置有碗盘右滑块(98),所述碗盘左滑块(97)和碗盘右滑块(98)均与第二电爪(8)相连接。
3.根据权利要求2所述的一种实现碗筷抓取的夹爪,其特征在于,所述碗盘左手指(91)的内侧安装有碗盘左定位块(93),所述碗盘右手指(92)的内侧安装有与碗盘左定位块(93)相对应的碗盘右定位块(94)。
4.根据权利要求2所述的一种实现碗筷抓取的夹爪,其特征在于,所述碗盘左夹紧块(95)和碗盘右夹紧块(96)均为食品级聚丙烯材料的构件。
5.根据权利要求1所述的一种实现碗筷抓取的夹爪,其特征在于,所述筷子抓手(7)包括筷子左手指(71),以及与筷子左手指(71)相匹配的筷子右手指(72),所述筷子左手指(71)的一端固定连接有筷子左滑块(75),且在筷子左手指(71)的另一端固定连接有筷子左夹紧块(73),所述筷子右手指(72)的一端固定连接有筷子右滑块(76),且在筷子左手指(71)的另一端固定连接有筷子右夹紧块(74),所述筷子左滑块(75)和筷子右滑块(76)均与第一电爪(6)相连接。
6.根据权利要求5所述的一种实现碗筷抓取的夹爪,其特征在于,所述筷子左夹紧块(73)和筷子右夹紧块(74)均为食品级聚丙烯材料的构件。
技术总结
本技术涉及智能餐厅技术领域,公开了一种实现碗筷抓取的夹爪,包括转换头,固定在转换头一端的第二电爪,以及固定在转换头另一端的第一电爪,第二电爪的一端安装有碗盘抓手,第一电爪的一端安装有筷子抓手,且在机器人快换盘的后侧固定连接有相机安装座,相机安装座的后侧固定连接有相机罩,相机罩的内侧安装有3D相机。本技术通过第一电爪控制筷子抓手,可以对筷子进行夹取;通过第二电爪控制碗盘抓手可以对碗盘进行夹取;从而实现了了一个夹爪可以同时夹取筷子和碗盘,操作方便;通过3D相机进行视觉采集,以确定碗盘和筷子的位置,可以实现碗盘抓手和筷子抓手精准地对碗盘和筷子的夹取;提高了自动化、智能化程度。
技术研发人员:孙腾,崔依然,李天宝,董忠,彭碧峰
受保护的技术使用者:深圳若愚科技有限公司
技术研发日:20240520
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!