一种多角度调节的五轴伺服机械手的制作方法
本技术涉及机械手,具体为一种多角度调节的五轴伺服机械手。
背景技术:
1、在物品移动过程中,五轴伺服机械手被广泛地用来对物品进行拿取处理,五轴伺服机械手通常配备有高精度的伺服电机和传感器,可以实时监测和控制机械手的运动,确保其在操作过程中的精准度和稳定性,这种机械手广泛应用于工业生产线、装配线、仓储物流等领域,可以代替人工完成重复性、繁琐或危险的工作,提高生产效率和产品质量,五轴伺服机械手在物品移动的过程中也有所应用。
2、经检索,现有中国专利公告号为:cn213320140u,提供了一种双臂双截五轴伺服机械手,该专利通过y轴驱动电机,y轴行走组件带动控制箱沿y轴移动,控制箱带动x轴驱动电机移动,x轴驱动电机驱动x轴行走组件,x轴行走组件带动z轴行走组件沿x轴移动,第一z轴驱动电机和第二z轴驱动电机驱动z轴行走组件沿z轴移动,带动机械手臂可以沿x、y和z轴方向移动,并且在机械手臂靠近物体时,红外测距传感器感知物体和机械手臂之间的距离,并传输到控制器中,当距离过近时,蜂鸣器打开提醒工作人员,通过温度传感器感知控制箱内部的温度,当温度过高时,散热风机打开为控制箱内部进行散热,该双臂双截五轴伺服机械手,不仅能够感应机械臂和物体间的距离,使机械臂能够在合适位置抓取,并在距离过近时自动提醒工作人员,避免物体损坏,而且能够感应控制箱内的温度,并自动进行散热,防止内部因高温而损坏。
3、虽然上述专利可以自动进行散热,防止内部因高温而损坏,但上述的一种双臂双截五轴伺服机械手还存在以下问题:在五轴伺服机械手工作时,机械手的底座一般固定在某一处,无法移动,机械手的工作范围就受到了限制,影响工作效率。
4、针对上述问题,为此,提出一种多角度调节的五轴伺服机械手。
技术实现思路
1、本实用新型的目的在于提供一种多角度调节的五轴伺服机械手,解决了背景技术中对底座一般固定在某一处,无法移动,影响工作效率发热问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种多角度调节的五轴伺服机械手,包括底座,所述底座顶部固定连接有两个滑轨,所述底座左侧固定连接有两个支撑板,两个所述支撑板顶部均固定连接有第一电机,两个所述第一电机输出端均贯穿滑轨并固定连接有丝杆,两个所述丝杆表面贯穿并螺纹连接有移动块,两个所述移动块之间固定连接有连接板,所述连接板顶部中心位置处开设有凹槽,所述凹槽内壁后端固定连接有液压缸,所述液压缸输出端固定连接有滑动块,所述滑动块顶部贯穿并固定连接有第二电机,所述第二电机输出端贯穿限位盘并固定连接有转盘,所述转盘顶部固定连接有五轴伺服机械手本体,所述转盘后侧设置有机械控制臂,所述机械控制臂底部设置有更换组件。
3、通过采用上述技术方案,启动第一电机工作,带动丝杆在滑轨内进行转动,然后带动移动块进行移动,从而带动连接板进行左右移动,来对机械手本体进行左右调整。
4、作为上述技术方案的进一步描述:所述更换组件包括固定板,所述固定板与机械控制臂之间固定连接,所述固定板底部中心位置处固定连接有安装座,所述固定板底部左右两侧均固定连接有转动件,两个所述转动件底部均固定连接有限位环,所述安装座外径均开设有两个u形槽,两个所述u形槽之间滑动连接有第一连接杆。
5、通过采用上述技术方案,更换组件可以对机械手进行更换,来适应不同的工作环境。
6、作为上述技术方案的进一步描述:所述滑轨内壁转动连接有丝杆,所述移动块与滑轨之间滑动连接。
7、通过采用上述技术方案,滑轨对移动块进行限位移动。
8、作为上述技术方案的进一步描述:所述滑动块顶部固定连接有限位盘。
9、通过采用上述技术方案,当滑动块移动时就可以带动限位盘进行移动。
10、作为上述技术方案的进一步描述:两个所述第一连接杆之间固定连接有第二连接杆,所述第二连接杆底部设置有机械手。
11、通过采用上述技术方案,利用第一连接杆与第二连接杆对机械手进行更换。
12、作为上述技术方案的进一步描述:两个所述限位环内径均贯穿并设置有第一连接杆。
13、通过采用上述技术方案,限位环对第一连接杆限位。
14、作为上述技术方案的进一步描述:两个所述第一连接杆表面贯穿并螺纹连接有螺帽。
15、通过采用上述技术方案,螺帽用来对第一连接杆限位之后进行固定。
16、作为上述技术方案的进一步描述:所述滑动块与连接板之间滑动连接。
17、通过采用上述技术方案,连接板对滑动块进行限位移动。
18、与现有技术相比,本实用新型的有益效果如下:
19、1、本实用新型提供的一种多角度调节的五轴伺服机械手,通过滑轨、丝杆、连接板、液压缸、电机、转盘,启动第一电机带动丝杆在滑轨内转动,然后带动移动块进行左右移动,就可以带动连接板进行左右移动,接着启动液压缸工作,就可以推动滑动块进行前后移动,接着启动第二电机进行工作,带动转盘在限位盘内转动,从而对机械手本体实现左右、前后、360转动,提高工作效率。
20、2、本实用新型提供的一种多角度调节的五轴伺服机械手,通过安装座、转动件、限位环、第一连接杆、螺帽,在对机械手安装时,把第二连接杆向上移动,使第一连接杆对准u形槽卡进去,然后依次对转动件进行转动,带动限位环转动,套在第一连接杆上,最后再利用螺帽进行固定,就可以根据需要对不同事物机械手进行更换,来适应不同的工作环境。
技术特征:
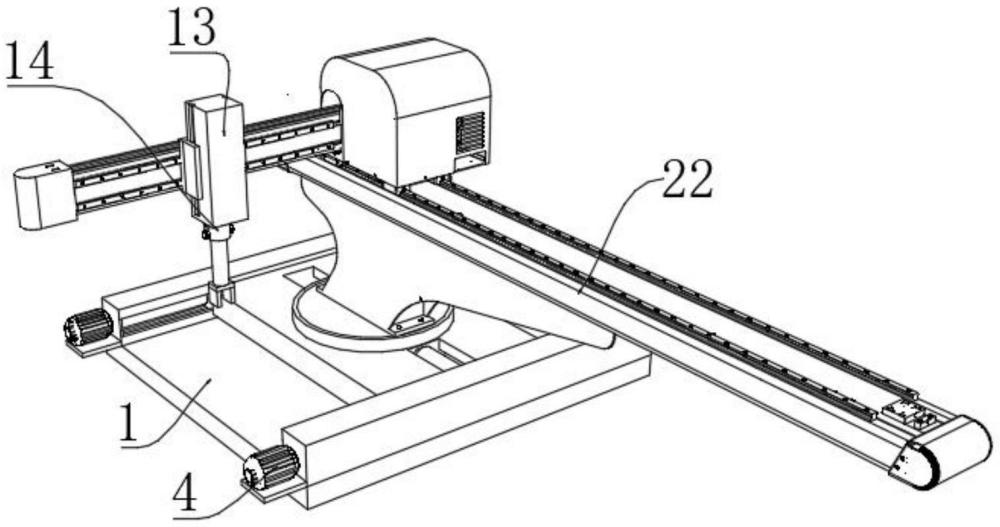
1.一种多角度调节的五轴伺服机械手,包括底座(1),其特征在于:所述底座(1)顶部固定连接有两个滑轨(2),所述底座(1)左侧固定连接有两个支撑板(3),两个所述支撑板(3)顶部均固定连接有第一电机(4),两个所述第一电机(4)输出端均贯穿滑轨(2)并固定连接有丝杆(5),两个所述丝杆(5)表面贯穿并螺纹连接有移动块(6),两个所述移动块(6)之间固定连接有连接板(7),所述连接板(7)顶部中心位置处开设有凹槽(8),所述凹槽(8)内壁后端固定连接有液压缸(9),所述液压缸(9)输出端固定连接有滑动块(23),所述滑动块(23)顶部贯穿并固定连接有第二电机(10),所述第二电机(10)输出端贯穿限位盘(11)并固定连接有转盘(12),所述转盘(12)顶部固定连接有五轴伺服机械手本体(22),所述转盘(12)后侧设置有机械控制臂(13),所述机械控制臂(13)底部设置有更换组件。
2.根据权利要求1所述的一种多角度调节的五轴伺服机械手,其特征在于:所述更换组件包括固定板(24),所述固定板(24)与机械控制臂(13)之间固定连接,所述固定板(24)底部中心位置处固定连接有安装座(14),所述固定板(24)底部左右两侧均固定连接有转动件(16),两个所述转动件(16)底部均固定连接有限位环(17),所述安装座(14)外径均开设有两个u形槽(15),两个所述u形槽(15)之间滑动连接有第一连接杆(18)。
3.根据权利要求1所述的一种多角度调节的五轴伺服机械手,其特征在于:所述滑轨(2)内壁转动连接有丝杆(5),所述移动块(6)与滑轨(2)之间滑动连接。
4.根据权利要求1所述的一种多角度调节的五轴伺服机械手,其特征在于:所述滑动块(23)顶部固定连接有限位盘(11)。
5.根据权利要求2所述的一种多角度调节的五轴伺服机械手,其特征在于:两个所述第一连接杆(18)之间固定连接有第二连接杆(20),所述第二连接杆(20)底部设置有机械手(21)。
6.根据权利要求2所述的一种多角度调节的五轴伺服机械手,其特征在于:两个所述限位环(17)内径均贯穿并设置有第一连接杆(18)。
7.根据权利要求2所述的一种多角度调节的五轴伺服机械手,其特征在于:两个所述第一连接杆(18)表面贯穿并螺纹连接有螺帽(19)。
8.根据权利要求1所述的一种多角度调节的五轴伺服机械手,其特征在于:所述滑动块(23)与连接板(7)之间滑动连接。
技术总结
本技术涉及机械手技术领域,公开了一种多角度调节的五轴伺服机械手,包括底座,所述底座顶部固定连接有两个滑轨,所述底座左侧固定连接有两个支撑板,两个所述支撑板顶部均固定连接有第一电机,两个所述第一电机输出端均贯穿滑轨并固定连接有丝杆,两个所述丝杆表面贯穿并螺纹连接有移动块,两个所述移动块之间固定连接有连接板,所述连接板顶部中心位置处开设有凹槽。本技术中,通过滑轨、丝杆、连接板、液压缸、电机、转盘,启动第一电机带动丝杆在滑轨内转动,然后带动移动块进行左右移动,就可以带动连接板进行左右移动,接着启动液压缸工作,就可以推动滑动块进行前后移动。
技术研发人员:杜振民,杨波,姜志超,杜雨萌,王珑皓
受保护的技术使用者:烟台吉森新材料科技有限公司
技术研发日:20240524
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!