一种工业机器人的夹紧工装的制作方法
本技术涉及工业机器人,尤其涉及一种工业机器人的夹紧工装。
背景技术:
1、机器人是自动控制机器的俗称,在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作,而机器人在进行作业时,通过自动化夹具工装对工件进行上下料夹持进行摆放运输。
2、现有的工业机器人的夹紧工装大多数为两爪或者三爪的气缸夹持机构对工件进行夹持,而由于工件的种类及形状不同,单一的两爪或者三爪夹具对工件夹紧时,只适用于方方正正的物体,对于异形物体不容易夹稳,实用性差,为此,我们提供一种工业机器人的夹紧工装来解决此问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人的夹紧工装来解决此问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
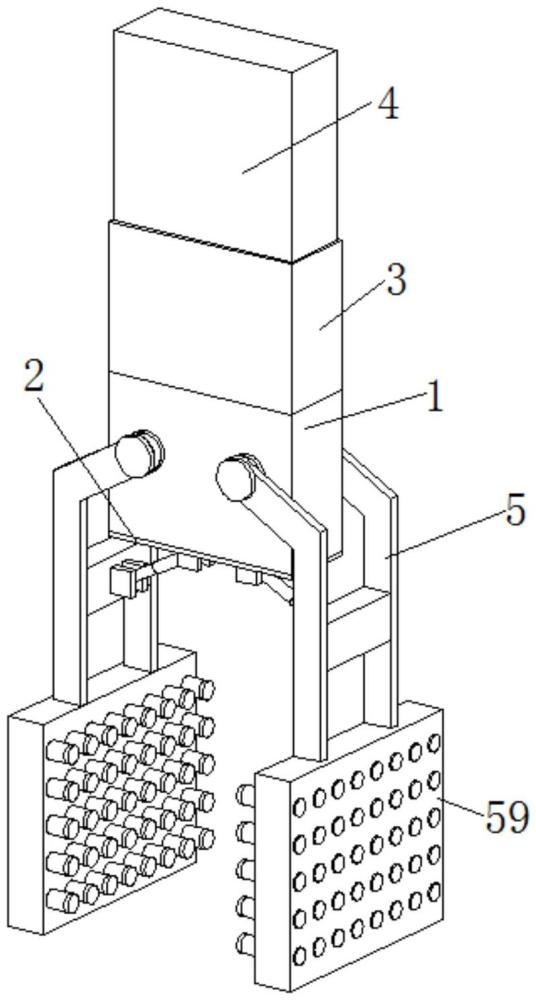
3、设计一种工业机器人的夹紧工装,包括底壳,所述底壳的下端螺接有底板,所述底壳的上端安装有支撑座,所述支撑座的上端安装有驱动机构,所述驱动机构的下端贯穿支撑座且延伸至底壳的内腔,所述底壳的内腔安装有与驱动机构相啮合转动的夹持机构。
4、进一步,所述驱动机构包括有气缸、活塞杆和双齿板,所述气缸安装在支撑座的上端,所述气缸的下端通过活塞杆连接双齿板,所述双齿板的下端贯穿支撑座且延伸至底壳的内腔。
5、进一步,所述夹持机构包括有支撑轴、齿轮、安装盘、夹臂、固定板和夹紧组件,两个所述支撑轴均与底壳的内腔两侧相转动连接,所述支撑轴的外侧均安装有与双齿板相啮合的齿轮,所述支撑轴的两端均贯穿底壳且延伸至外侧螺接安装盘,所述安装盘的外侧固定套接夹臂,每两个所述夹臂之间共同连接固定板,每两个所述夹臂的下端共同连接夹紧组件。
6、进一步,所述夹紧组件包括有夹板、凹槽、活动杆、夹柱、橡胶垫、限位板和弹簧,所述夹板安装在夹臂的下端,所述夹板的一侧等距设置有凹槽,所述凹槽的内腔安装弹簧,所述弹簧的一端连接夹柱,所述夹柱的一端粘接橡胶垫,所述夹柱的一端连接活动杆,所述活动杆的一端穿过弹簧后贯穿凹槽且延伸至外侧连接限位板。
7、进一步,所述固定板相对应的一侧均安装有第一连接件,所述第一连接件均通过销轴活动连接有伸缩杆,所述伸缩杆远离第一连接件的一端均通过销轴活动连接有第二连接件,所述第二连接件均安装在底板的下端。
8、进一步,所述双齿板的两侧下部均连接有单齿板。
9、进一步,所述底壳的内腔两侧均对称连接有与双齿板位置相匹配的限位条。
10、本实用新型提出的一种工业机器人的夹紧工装,有益效果在于:
11、1、通过驱动机构的双齿板带动夹持机构的两个齿轮转动,而两个齿轮通过支撑轴带动安装盘及夹臂进行左右转动,而夹臂的另一端带动夹紧组件对工件进行夹紧或放松,当需要夹紧工件时,两个夹紧组件的夹板外侧的多个夹柱带动橡胶垫朝着工件方向移动,进而对工件进行夹压,且当工件为异形物体时,多个夹柱接触到异形物体表面不同位置,而其由于异形物体表面凹凸或者厚度不一,橡胶垫带动夹柱压缩弹簧并带动活动杆朝着远离夹板的方向移动,进而多个夹柱带动橡胶垫与异形工件表面多处位置进行贴合并夹持,增加与异形工件表面接触的面积,便于有效的提高了夹持的稳定性,从而提高了夹持效果;
12、2、通过驱动机构的双齿板两侧设计单齿板,便于当双齿板上移到最高位置时,单齿板与齿轮之间相啮合,便于对双齿板进行限位移动,避免双齿板移动至脱落与齿轮之间后导致夹持机构失去夹持动力,进而有效的提高可使用效果,且通过设计的限位条对双齿板起到有效的限位移动,方便双齿板稳定的上下移动,提高其工作的稳定性。
技术特征:
1.一种工业机器人的夹紧工装,包括底壳(1),其特征在于,所述底壳(1)的下端螺接有底板(2),所述底壳(1)的上端安装有支撑座(3),所述支撑座(3)的上端安装有驱动机构(4),所述驱动机构(4)的下端贯穿支撑座(3)且延伸至底壳(1)的内腔,所述底壳(1)的内腔安装有与驱动机构(4)相啮合转动的夹持机构(5)。
2.根据权利要求1所述的一种工业机器人的夹紧工装,其特征在于,所述驱动机构(4)包括有气缸(41)、活塞杆(42)和双齿板(43),所述气缸(41)安装在支撑座(3)的上端,所述气缸(41)的下端通过活塞杆(42)连接双齿板(43),所述双齿板(43)的下端贯穿支撑座(3)且延伸至底壳(1)的内腔。
3.根据权利要求2所述的一种工业机器人的夹紧工装,其特征在于,所述夹持机构(5)包括有支撑轴(51)、齿轮(52)、安装盘(53)、夹臂(54)、固定板(55)和夹紧组件(59),两个所述支撑轴(51)均与底壳(1)的内腔两侧相转动连接,所述支撑轴(51)的外侧均安装有与双齿板(43)相啮合的齿轮(52),所述支撑轴(51)的两端均贯穿底壳(1)且延伸至外侧螺接安装盘(53),所述安装盘(53)的外侧固定套接夹臂(54),每两个所述夹臂(54)之间共同连接固定板(55),每两个所述夹臂(54)的下端共同连接夹紧组件(59)。
4.根据权利要求3所述的一种工业机器人的夹紧工装,其特征在于,所述夹紧组件(59)包括有夹板(591)、凹槽(592)、活动杆(593)、夹柱(594)、橡胶垫(595)、限位板(596)和弹簧(597),所述夹板(591)安装在夹臂(54)的下端,所述夹板(591)的一侧等距设置有凹槽(592),所述凹槽(592)的内腔安装弹簧(597),所述弹簧(597)的一端连接夹柱(594),所述夹柱(594)的一端粘接橡胶垫(595),所述夹柱(594)的一端连接活动杆(593),所述活动杆(593)的一端穿过弹簧(597)后贯穿凹槽(592)且延伸至外侧连接限位板(596)。
5.根据权利要求3所述的一种工业机器人的夹紧工装,其特征在于,所述固定板(55)相对应的一侧均安装有第一连接件(56),所述第一连接件(56)均通过销轴活动连接有伸缩杆(57),所述伸缩杆(57)远离第一连接件(56)的一端均通过销轴活动连接有第二连接件(58),所述第二连接件(58)均安装在底板(2)的下端。
6.根据权利要求2所述的一种工业机器人的夹紧工装,其特征在于,所述双齿板(43)的两侧下部均连接有单齿板(44)。
7.根据权利要求2所述的一种工业机器人的夹紧工装,其特征在于,所述底壳(1)的内腔两侧均对称连接有与双齿板(43)位置相匹配的限位条(46)。
技术总结
本技术涉及工业机器人技术领域,尤其是一种工业机器人的夹紧工装,包括底壳,所述底壳的下端螺接有底板,所述底壳的上端安装有支撑座,所述支撑座的上端安装有驱动机构,所述驱动机构的下端贯穿支撑座且延伸至底壳的内腔,所述底壳的内腔安装有与驱动机构相啮合转动的夹持机构,与现有的技术相比,本技术的结构设计合理,且实用性强,方便对异性工件起到有效的夹紧固定,便于有效的提高了稳定夹持的效果,方便使用。
技术研发人员:苏卫宏
受保护的技术使用者:机灵优智能技术服务(苏州)有限公司
技术研发日:20240603
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!